新代控制器与各厂家伺服连接设定手册.docx
《新代控制器与各厂家伺服连接设定手册.docx》由会员分享,可在线阅读,更多相关《新代控制器与各厂家伺服连接设定手册.docx(110页珍藏版)》请在冰豆网上搜索。
新代控制器与各厂家伺服连接设定手册
SYNTEC伺服资料
Ver1.1
苏州新代技术中心
2010年1月
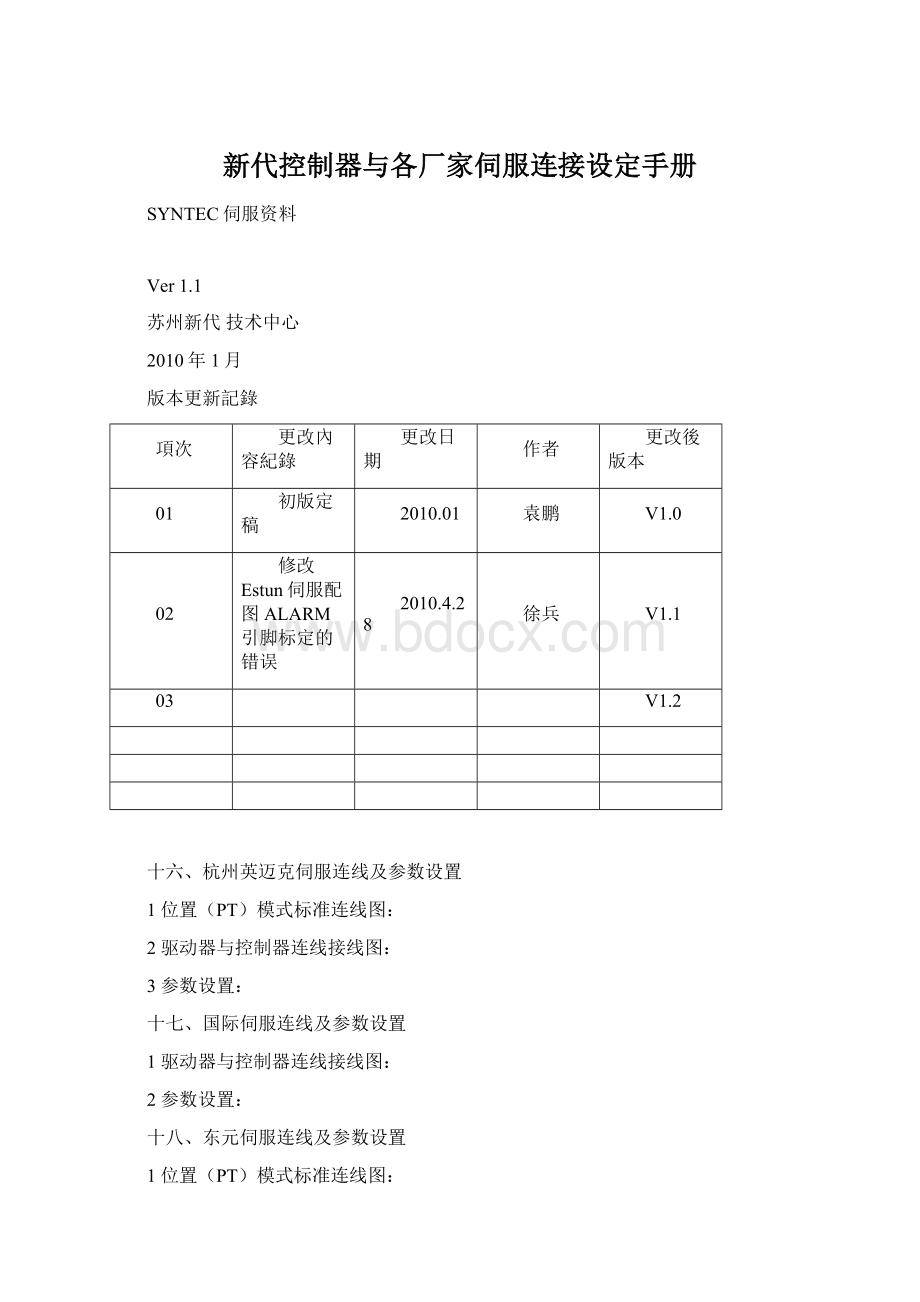
版本更新記錄
項次
更改內容紀錄
更改日期
作者
更改後版本
01
初版定稿
2010.01
袁鹏
V1.0
02
修改Estun伺服配图ALARM引脚标定的错误
2010.4.28
徐兵
V1.1
03
V1.2
十六、杭州英迈克伺服连线及参数设置
1位置(PT)模式标准连线图:
2驱动器与控制器连线接线图:
3参数设置:
十七、国际伺服连线及参数设置
1驱动器与控制器连线接线图:
2参数设置:
十八、东元伺服连线及参数设置
1位置(PT)模式标准连线图:
2驱动器与控制器连线接线图:
3参数设置:
十九、三菱MR-E伺服连线及参数设置
1驱动器与控制器连线接线图:
2参数设置:
一、台达A系列连线及参数设置
1台达A系列电源接法:
2台达A系列编码器接线图:
3位置(PT)模式标准连线图:
4驱动器与控制器连线接线图:
5参数设置:
参数设置
伺服驱动器
CNC控制器
参数号
设置内容
备注
参数号
设置内容
备注
P1-00
0
0:
AB脉冲1:
CW/CCW2:
脉冲+符号
9
3
轴板形态
P1-01
100
0:
位置模式,扭矩输出方向与指令转速方向相反100位置模式,扭矩输出方向与指令转速方向相同
10
0
伺服警报接点形态
P1-44
1
电子齿轮比分子
61
2500
X轴感应器解析度
P1-45
1
电子齿轮比分母
62
2500
Y轴感应器解析度
P1-46
1
检出器输出脉冲数设定(PG分周比)
63
2500
Z轴感应器解析度
P2-00
40
位置回路增益
201
0
X轴感应器型别
P2-15
0
逆向运转极限为B接点设置不正确报ALM14
202
0
Y轴感应器型别
P2-16
0
正向运转极限为B接点设置不正确报ALM14
203
0
Z轴感应器型别
P2-17
0
紧急停止为B接点设置不正确报ALM13
381
2
X轴位置伺服方式
P2-08
10
参数重置
382
2
Y轴位置伺服方式
383
2
Z轴位置伺服方式
181
40
X轴伺服回路增益
182
40
Y轴伺服回路增益
183
40
Z轴伺服回路增益
二、台达B系列连线及参数设置
1台达B系列电源接法:
2台达B系列编码器接线图:
3位置(PT)模式标准连线图:
4驱动器与控制器连线接线图:
5参数设置:
参数设置
伺服驱动器
CNC控制器
参数号
设置内容
备注
参数号
设置内容
备注
P1-00
0
0:
AB脉冲1:
CW/CCW2:
脉冲+符号
9
3
轴板形态
P1-01
100
0:
位置模式,扭矩输出方向与指令转速方向相反100位置模式,扭矩输出方向与指令转速方向相同
10
0
伺服警报接点形态
P1-44
1
电子齿轮比分子
61
2500
X轴感应器解析度
P1-45
1
电子齿轮比分母
62
2500
Y轴感应器解析度
P1-46
2500
检出器输出脉冲数设定(PG分周比)
63
2500
Z轴感应器解析度
P2-00
40
位置回路增益
201
0
X轴感应器型别
P2-13
0
逆向运转极限为B接点设置不正确报ALM14
202
0
Y轴感应器型别
P2-14
0
正向运转极限为B接点设置不正确报ALM15
203
0
Z轴感应器型别
P2-15
0
紧急停止为B接点设置不正确报ALM13
381
2
X轴位置伺服方式
P2-08
10
参数重置
382
2
Y轴位置伺服方式
383
2
Z轴位置伺服方式
181
40
X轴伺服回路增益
182
40
Y轴伺服回路增益
183
40
Z轴伺服回路增益
三、台达AB系列连线及参数设置
1台达AB系列电源接法:
2台达AB系列编码器接线图:
3位置(PT)模式标准连线图:
4驱动器与控制器连线接线图:
5参数设置:
参数设置
伺服驱动器
CNC控制器
参数号
设置内容
备注
参数号
设置内容
备注
P1-00
0
0:
AB脉冲1:
CW/CCW2:
脉冲+符号
9
3
轴板形态
P1-01
100
0:
位置模式,扭矩输出方向与指令转速方向相反100位置模式,扭矩输出方向与指令转速方向相同
10
0
伺服警报接点形态
P1-44
1
电子齿轮比分子
61
2500
X轴感应器解析度
P1-45
1
电子齿轮比分母
62
2500
Y轴感应器解析度
P1-46
2500
检出器输出脉冲数设定(PG分周比)
63
2500
Z轴感应器解析度
P2-00
40
位置回路比例增益
201
0
X轴感应器型别
P2-15
0
逆向运转极限为B接点设置不正确报ALM14
202
0
Y轴感应器型别
P2-16
0
正向运转极限为B接点设置不正确报ALM14
203
0
Z轴感应器型别
P2-17
0
紧急停止为B接点设置不正确报ALM13
381
2
X轴位置伺服方式
P2-08
10
参数重置
382
2
Y轴位置伺服方式
383
2
Z轴位置伺服方式
181
40
X轴伺服回路增益
182
40
Y轴伺服回路增益
183
40
Z轴伺服回路增益
四、台达A2系列连线及参数设置
1台达A2系列电源接法:
2台达A2系列编码器接线图:
3位置(PT)模式标准连线图:
4驱动器与控制器连线接线图:
5参数设置:
参数设置
伺服驱动器
CNC控制器
参数号
设置内容
备注
参数号
设置内容
备注
P1-00
0
0:
AB脉冲1:
CW/CCW2:
脉冲+符号
9
3
轴板形态
P1-01
100
0:
位置模式,扭矩输出方向与指令转速方向相反100位置模式,扭矩输出方向与指令转速方向相同
10
0
伺服警报接点形态
P1-44
1
电子齿轮比分子
61
2500
X轴感应器解析度
P1-45
1
电子齿轮比分母
62
2500
Y轴感应器解析度
P1-46
2500
检出器输出脉冲数设定(PG分周比)
63
2500
Z轴感应器解析度
P2-00
40
位置回路增益
201
0
X轴感应器型别
P2-15
0
逆向运转极限为B接点设置不正确报ALM14
202
0
Y轴感应器型别
P2-16
0
正向运转极限为B接点设置不正确报ALM14
203
0
Z轴感应器型别
P2-17
0
紧急停止为B接点设置不正确报ALM13
381
2
X轴位置伺服方式
P2-08
10
参数重置
382
2
Y轴位置伺服方式
383
2
Z轴位置伺服方式
181
40
X轴伺服回路增益
182
40
Y轴伺服回路增益
183
40
Z轴伺服回路增益
五、台达B2系列连线及参数设置
1台达B2系列电源接法:
2台达B2系列编码器接线图:
3位置(PT)模式标准连线图:
4驱动器与控制器连线接线图:
5参数设置:
参数设置
伺服驱动器
CNC控制器
参数号
设置内容
备注
参数号
设置内容
备注
P1-00
0
0:
AB脉冲1:
CW/CCW2:
脉冲+符号
9
3
轴板形态
P1-01
100
0:
位置模式,扭矩输出方向与指令转速方向相反100位置模式,扭矩输出方向与指令转速方向相同
10
0
伺服警报接点形态
P1-44
1
电子齿轮比分子
61
2500
X轴感应器解析度
P1-45
1
电子齿轮比分母
62
2500
Y轴感应器解析度
P1-46
2500
检出器输出脉冲数设定(PG分周比)
63
2500
Z轴感应器解析度
P2-00
40
位置回路增益
201
0
X轴感应器型别
P2-15
0
逆向运转极限为B接点设置不正确报ALM14
202
0
Y轴感应器型别
P2-16
0
正向运转极限为B接点设置不正确报ALM14
203
0
Z轴感应器型别
P2-17
0
紧急停止为B接点设置不正确报ALM13
381
2
X轴位置伺服方式
P2-08
10
参数重置
382
2
Y轴位置伺服方式
383
2
Z轴位置伺服方式
181
40
X轴伺服回路增益
182
40
Y轴伺服回路增益
183
40
Z轴伺服回路增益
 升级会员
升级会员 