振动磨机之模糊控制器.docx
《振动磨机之模糊控制器.docx》由会员分享,可在线阅读,更多相关《振动磨机之模糊控制器.docx(16页珍藏版)》请在冰豆网上搜索。
振动磨机之模糊控制器
3振动磨机模糊控制器
3.1引言
磨机系统的破磨过程机理复杂,其整个过程的动态特性也非常复杂,由于入磨物料的粒度、湿度、硬度和易磨性是随机频繁变化的,从而造成实际生产过程中,磨机的负荷经常会出现较大的波动。
在传统的生产工艺中,是由人工来控制磨机负荷。
操作工凭借经验,用人耳来判断磨机磨音的高低,再由人工来调整磨机给料量,以此来控制磨机的负荷状态。
而模糊控制就是将上述语言归纳的手动控制策略上升为数值运算,采用微机完成任务,代替人的手动控制,实现模糊自动化。
3.2模糊控制原理
模糊控制是以模糊集理论、模糊语言变量和模糊逻辑推理为基础的一种智能控制方法,它从行为上模仿人的模糊推理和决策过程。
该方法首先将操作人员或专家经验编程模糊规则,然后将来自传感器的实时信号模糊化,将模糊化后的信号作为模糊规则的输入,完成模糊推理,将推理后得到的输出量加到执行器上。
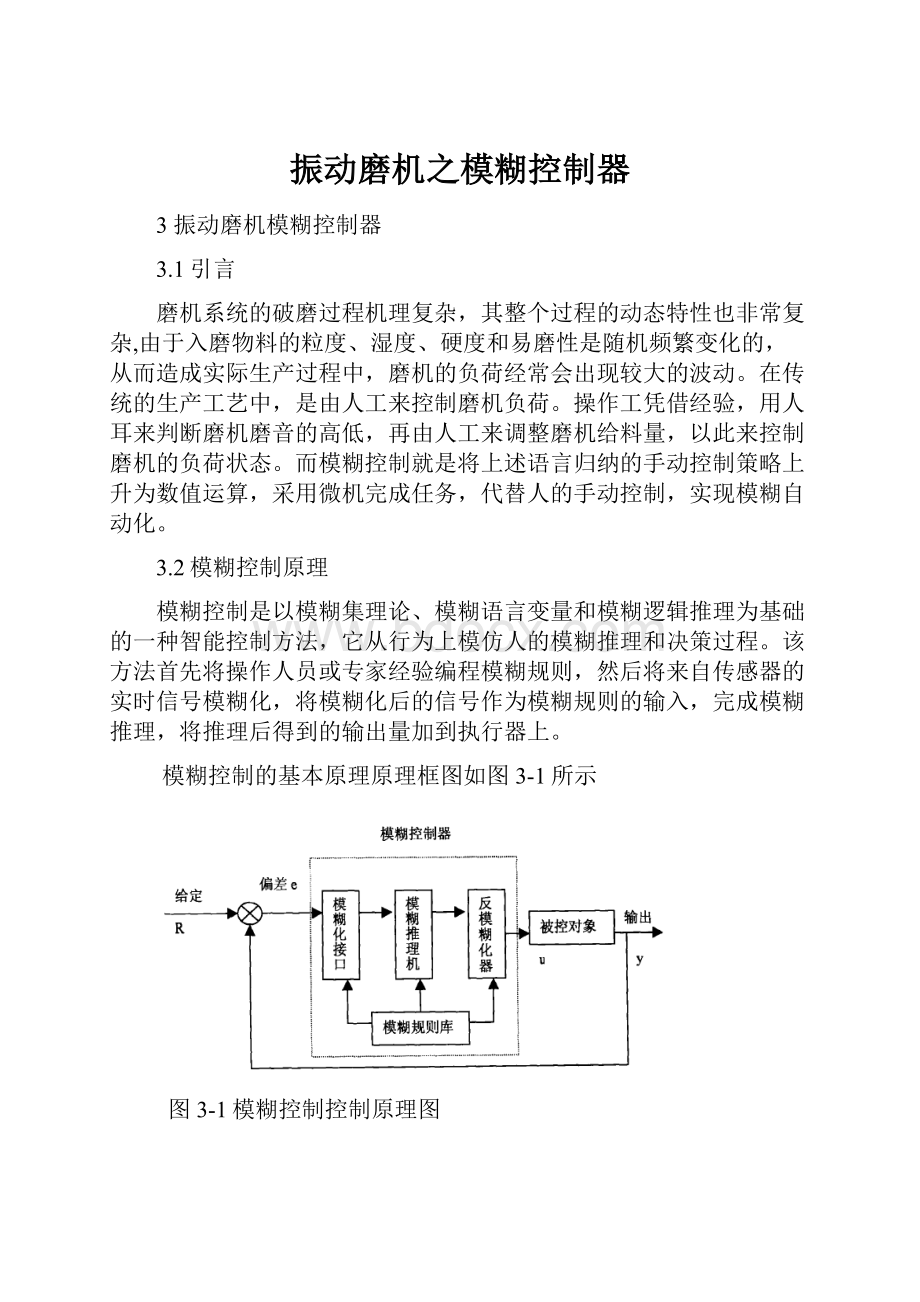
模糊控制的基本原理原理框图如图3-1所示
图3-1模糊控制控制原理图
它的核心部分为模糊控制器,如图中点划线框中的部分所示,模糊控制器的控制规律有计算机的程序实现。
实现一步模糊控制算法的过程描述如下:
微机经中断采样获取被控制量的精确值,然后将此量与给定值比较得到误差信号E,一般一般选误差信号E作为模糊控制器的一个输入量。
把误差信号E的精确量进行模糊化变成模糊量。
误差E的模糊量可用相应的模糊语言表示,得到误差E的模糊语言集合的一个子集e(e是一个模糊矢量),再由e和模糊关系R根据推理的合成规则进行模糊决策,得到模糊控制量u,即由图1可知,模糊控制系统与通常的计算机数字控制系统的主要差别是采用了模糊控制器。
模糊控制器是模糊控制系统的核心,一个模糊控制系统性能的优劣,主要取决于模糊控制系统的结构、所采用的模糊规则、合成推理算法及模糊决策的方法等因素。
模糊控制器也称为模糊逻辑控制器,由于所采用的模糊控制规则是由模糊理论中模糊条件语句来描述的,因此,模糊控制器是一种语言型控制器,故也称为模糊语言控制器。
3.3模糊控制器的组成
模糊控制器的组成框图如图3-2
图3-2
3.3.1模糊化接口
模糊控制器的输入必须通过模糊化才能用于控制输出,因此,它实际上是模糊控制器的输入接口,其主要的作用是将真实的确定量输入转换为一个模糊矢量。
对于一个模糊输入变量e,其模糊子集通常可以按如下方式划分:
1)e={负大,负小,零,正小,正大}={NB,NS,ZO,PS,PB}
2)e={负大,负中,负小,零,正小,正中,正大}={NB,NM,NS,ZO,PS,PM,PB}
3)e={负大,负中,负小,零负,零正,正小,正中,正大}={NB,NM,NS,NZ,PZ,PS,PM,PB}
3.3.2知识库
知识库由数据库和规则库两部分组成。
1)数据库
数据库所存放的是所有输入、输出变量的全部模糊子集的隶属度矢量值(即经过论域等级离散化以后对应值得集合),若论域为连续域,则为隶属度函数。
在规则推理的模糊关系方程求解过程中,向推理机提供数据。
2)规则库
模糊控制器的规则库基于专家知识或手动操作人员长期积累的经验,它是按人的直觉推理的一种语言表示形式。
模糊规则通常有一系列的关系词连接而成,如if-then,else,also,end,or等,关系词必须经过“翻译”才能将模糊规则数数值化。
最常用的关系词为if-then,also,对于多变量模糊控制系统,还有end等。
例如某模糊控制系统输入变量为e(误差)和ec(误差变化),它们对应的语言变量为E和EC,可以给出一组模糊规则为:
:
IFEisNBandECisNBthenUisPB
:
IFEisNBandECisNSthenUisPM
通常把if....部分称为“前提部”,而then....部分称为“结论部”,其基本结构可归纳为ifAandBthenC,其中A为论域U上的一个模糊子集,B为论域V上的一个模糊子集。
根据人工控制经验,可离线组织其控制决策表R,R是笛卡尔乘积集UxW上的一个模糊子集,则某一时刻其控制量由下式给出
C=(A
B)
R(3—1)
式中
为模糊直积运算,
为模糊合成运算。
规则库是用来存放全部模糊控制规则的,在推理时为“推理机”提供控制规则。
由上述可知,规则的条数与模糊变量的模糊子集划分有关,划分越细,规则条数越多,但并不代表规则库的准确度越高,规则库的准确性还与专家知识的准确性有关。
3.3.3推理与解模糊接口
推理是模糊控制器中,根据输入模糊量,由模糊控制规则完成模糊推理来求解模糊关系方程,并获得模糊控制量的功能部分。
在模糊控制中,考虑到推理时间,通常采用运算较简单的推理方法。
最基本的有Zadeh近似原理,它包涵正向推理和逆向推理两类。
正向推理常被用于模糊控制中,而逆向推理一般用于知识工程学领域的专家系统中。
推理结果的获得,表示模糊控制的规则推理功能已经完成。
但是,至此所获得的结果任是一个模糊矢量,不能直接用作为控制量,还必须进行一次转换,求的清晰的控制量输出,即为解模糊。
通常把输出端具有转换功能作用的部分称为解模糊接口。
3.4模糊控制器的结构
在确定性控制系统中,根据控制器输出的个数,可分为单变量控制系统和多变量控制系统。
在模糊控制系统中,也可类似地划分为单变量模糊控制和多变量模糊控制。
1.单变量模糊控制器
在单变量模糊控制器中,将其输入变量的个数定义为模糊控制的维数,如图5所示
(a)一维模糊控制器
(b)二维模糊控制器
(c)三维模糊控制器
图3-3单变量模糊控制器
1)一维模糊控制器
如图3-3(a)所示,一维模糊控制器的输入变量往往选择为受控变量和输入给定值的偏差e。
由于仅仅采用偏差值,很难反映过程的动态特性品质,因此,所能获得的系统动态性能是不能令人满意的。
这种一维模糊控制器往往被用于一阶被控对象。
2)二维模糊控制器
如图3-3(b)所示,二维模糊控制器的两个输入变量基本上都选用受控变量值和输入给定值得偏差和偏差变化,由于他们能够较严格的反映受控过程中输出量的动态特性,因此,在控制效果上要比一维控制器好得多,也是目前采用较广泛的一类模糊控制器。
3)三维模糊控制器
如图3-3(c)所示,三维模糊控制器的三个输入变量分别为偏差、偏差变化和偏差变化率。
由于这种模糊控制器结构较复杂,推理运算时间长,因此,除对动态特性的要求特别高的场合之外,一般较少选用三维模糊控制器。
上述3类模糊控制器的输出变量,均选择了受控变量的变化值。
从理论上讲,模糊控制系统所选用的模糊控制器维数越高,系统的控制精度也就越高。
但是维数选择太高,模糊控制律就过于复杂,基于模糊合成推理的控制算法的计算机实现也就更困难,这是人们在设计模糊控制系统时多数采用二维控制器的原因。
在需要时,为了获得较好的上升段特性和改善控制器的动态品质,也可以对模糊控制器的输出量进行分段选择,即在偏差大时,以控制量的值为输出;而当偏差小或中时,则以控制量的增量为输出
2.多变量模糊控制器
一个多变量模糊控制器所采用的模糊控制器具有多变量结构。
要直接设计一个多变量模糊控制器是相当困难的,可利用模糊控制器本身的解耦特点,通过模糊关系方程求解,在控制器结构上实现解耦,即将一个多输入多输出的模糊控制器,分解成若干个多输入单输出的模糊控制器,这样可采用单变量模糊控制方法进行设计。
3.5模糊控制系统框图
根据系统构成,基于磨机负荷控制的模糊控制系统框图如图3-4。
这是一个恒负荷控制系统,磨机实际负荷以电流信号表示,模糊控制器根据负荷设定值和实际值的偏差、偏差变化率,改变输出电压,电压变化使得变频器频率变化,调节给料电机转速,从而使得振动磨机实际负荷跟随设定值,达到磨机负荷控制目的。
图3-4模糊控制系统框图
3.6模糊控制器设计
模糊控制器是模糊控制系统的核心,是模糊控制系统控制品质的主要保证。
模糊控制器的设计,一般是先在经验基础上确定各个相关参数及其控制规则,然后在运行中反复进行调整,以达到最佳控制效果【3】。
按照模块化设计概念,该系统的模糊控制器是单输入-单输出二维模糊控制器,其结构如图
(2),输入量分别为负荷偏差
及其偏差变化率
,而输出量为控制给料机电机转速变频器电压
。
它们的模糊控制器语言变量分别是
,
,
。
图3.6.
图3-5模糊控制器功能模块
1.模糊化
根据负荷偏差
、偏差变化
、控制量
的实际论域,选取合理的量化因子
、
和比例因子
,通常就把语言变量的论域从连续域转换成有限整数的离散论域,设有物理量,其论域X=[-xx],把此论域转换成整数N=[-n,-n+1,…-1,0,1….n]。
令k为量化因子,即
(3—2)
取
、
、
的量化论域均为
,且在
、
、
的论域上定义七个语言变量值{NB,NM,NS,ZO,PS,PM,PB}模糊子集,根据人工控制负荷的经验,得到隶属度的三角函数为:
得到的隶属度函数均为三角形形状如图2.6.2。
图3-6模糊变量隶属函数
根据隶属度函数图可以得到偏差e、偏差变化ec、控制量u的隶属度如下表:
表3-1偏差e的语言变量值的隶属度(
)
-6
-5
-4
-3
-2
-1
0
1
2
3
4
5
6
NB
1
0.5
0
0
0
0
0
0
0
0
0
0
0
NM
0
0.5
1
0.5
0
0
0
0
0
0
0
0
0
NS
0
0
0
0.5
1
0.5
0
0
0
0
0
0
0
ZO
0
0
0
0
0
0.5
1
0.5
0
0
0
0
0
PS
0
0
0
0
0
0
0
0.5
1
0.5
0
0
0
PM
0
0
0
0
0
0
0
0
0
0.5
1
0.5
0
PB
0
0
0
0
0
0
0
0
0
0
0
0.5
1
表3-2偏差变化ec的语言变量值的隶属度(
)
-6
-5
-4
-3
-2
-1
0
1
2
3
4
5
6
NB
1
0.5
0
0
0
0
0
0
0
0
0
0
0
NM
0
0.5
1
0.5
0
0
0
0
0
0
0
0
0
NS
0
0
0
0.5
1
0.5
0
0
0
0
0
0
0
ZO
0
0
0
0
0
0.5
1
0.5
0
0
0
0
0
PS
0
0
0
0
0
0
0
0.5
1
0.5
0
0
0
PM
0
0
0
0
0
0
0
0
0
0.5
1
0.5
0
PB
0
0
0
0
0
0
0
0
0
0
0
0.5
1
表3-3控制量u的语言变量值的隶属度(
)
-6
-5
-4
-3
-2
-1
0
1
2
3
4
5
6
NB
1
0.5
0
0
0
0
0
0
0
0
0
0
0
NM
0
0.5
1
0.5
0
0
0
0
0
0
0
0
0
NS
0
0
0
0.5
1
0.5
0
0
0
0
0
0
0
ZO
0
0
0
0
0
0.5
1
0.5
0
0
0
0
0
PS
0
0
0
0
0
0
0
0.5
1
0.5
0
0
0
PM
0
0
0
0
0
0
0
0
0
0.5
1
0.5
0
PB
0
0
0
0
0
0
0
0
0
0
0
0.5
1
2.模糊控制规则
在研究多个模糊逻辑控制规则的基础上,结合专家经验或过程知识经过实验反复分析修改以后,总结出比较有代表性的一种控制规则如表3-4。
表3-4模糊控制规则表
ECE
NB
NM
NS
ZO
PS
PM
PB
NB
NB
NB
NM
NM
NS
NS
PM
NM
NB
NM
NS
NS
NS
ZO
PM
NS
NB
NM
NS
NS
ZO
PS
PB
ZO
NB
NS
NS
ZO
PS
PS
PB
PS
NB
NS
ZO
PS
PS
PM
PB
PM
NM
ZO
PS
PS
PS
PM
PB
PB
NM
PS
PS
PM
PM
PB
PB
3.模糊推理、清晰化
以模糊控制规则为大前提,输入模糊变量
、
为小前提,采用最常用的Mamdani直接推理算法推出输出模糊变量
。
用重心法将模糊量转换为清晰的数字量去控制被控对象。
利用MATLAB模糊逻辑工具箱的图形用户界面——模糊推理系统编辑器进行模糊推理和清晰化。
1)在MATLAB的命令窗口中直接输入“fuzzy”命令。
2)利用模糊推理系统编辑器中的“Edit—AddVariable…Input”菜单命令,添加一个输入语言变量,并将两个输入变量和一个输出变量的名称分别定义为负荷、负荷变化、和电压如图3-7所示。
图3-7模糊推理系统的编辑器窗口
3)利用编辑器窗口中的“Edit—MembershipFunction
菜单命令,打开隶属度编辑器,根据前面得到的偏差e、偏差变化ec、控制量u的语言变量值的隶属度(
)可得到如图3-8所示:
图3-8
4)利用编辑窗口中“View—Rule”菜单命令,可得到该模糊控制及系统的模糊规则浏览器,将前面得到的49条规则添入,可得到一下图:
图3-9
5)利用编辑器窗口“View—Surface”菜单命令,可得到输入输出特性曲面如图3-10所示
图3-10输入—输出特性曲面图
3.7对模糊控制器进行仿真
理论设计结束后,遵循相似性原理,往往会利用计算机仿真技术对控制系统性能进行动态研究。
本文基于MATLAB/Simulink实现控制系统动态仿真分析。
输入量
:
磨机电动机电流偏差
的基础论域为:
[-1A,+1A];
输入量
:
磨机负荷偏差变化率
的基础论域为:
[-30A,+30A]
输出量
:
给料机交流电机的频率
基础论域为:
[-25V,+25V];
由以上可得
、
、
。
磨机的数学模型可等效为一个带滞后的二阶惯性环节系统。
近似模型为下
(3—3)
其中,
——系统无阻尼固有频率
——阻尼比
——延迟时间
本文取
=10
,
=0.46,
=3s。
在MATLAB环境下应用模糊控制工具箱建立系统控制模型并用Simulink进行了系统的计算机仿真,控制振动磨机模糊控制系统的的Simulink模型如图3-11所示
图3-11仿真模型
启动仿真后可得到仿真曲线如图3-12所示
图3-12仿真曲线
 升级会员
升级会员 