控制工程基础实验报告.docx
《控制工程基础实验报告.docx》由会员分享,可在线阅读,更多相关《控制工程基础实验报告.docx(14页珍藏版)》请在冰豆网上搜索。
控制工程基础实验报告
控制工程基础[英]实验
实验一.典型环节的模拟研究:
已知一个小车、倒单摆系统非线性系统方程为:
其中假设
,
(1)要求绘出系统
的状态响应曲线
(2)并将上述系统在
的条件下线性化,并要求绘出线性化后系统
的状态响应曲线,并与非线性系统状态响应曲线相比较。
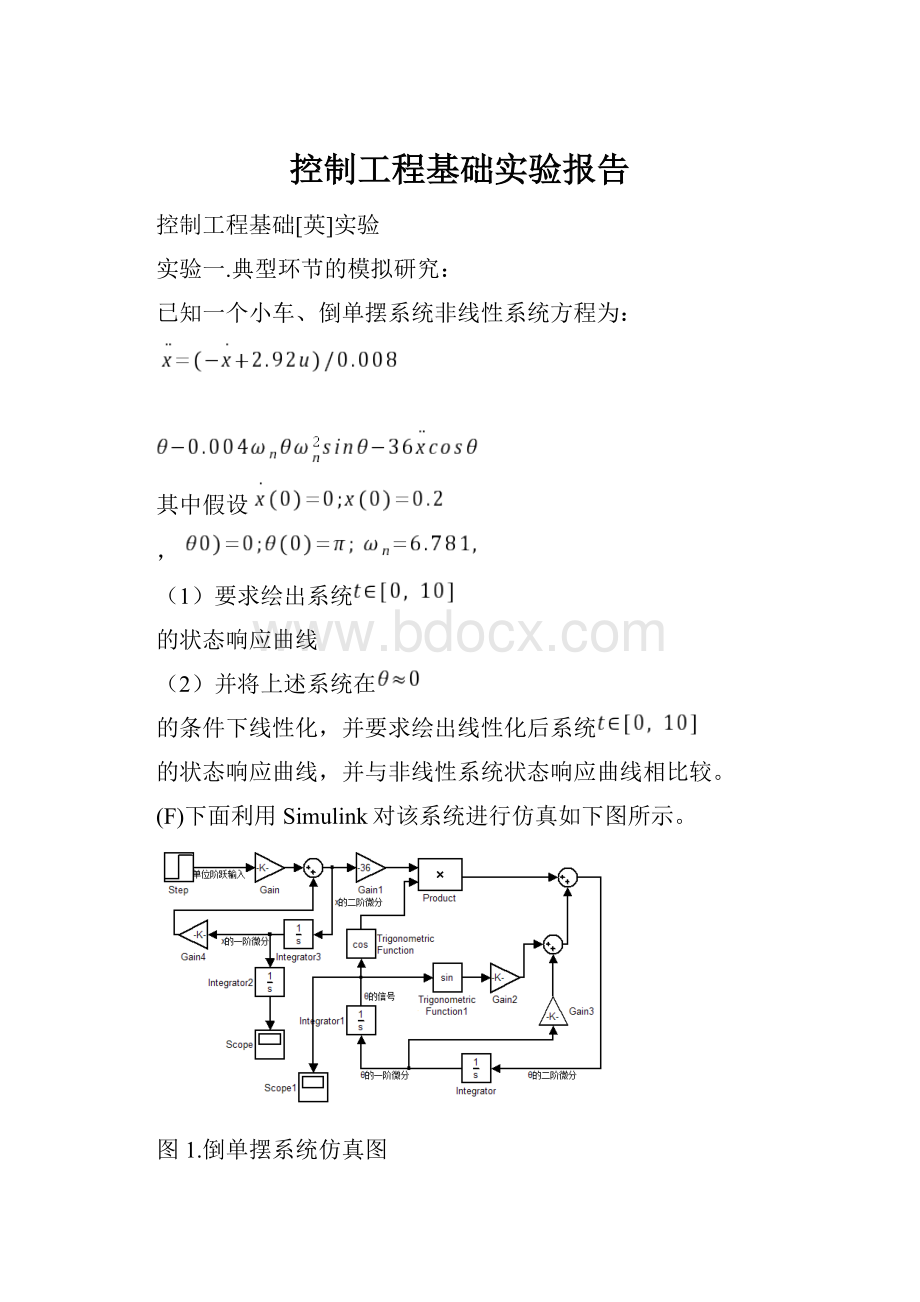
(F)下面利用Simulink对该系统进行仿真如下图所示。
图1.倒单摆系统仿真图
在图中已经对主要信号进行了标注下面给出每个未标注信号后加入放大器的增益:
通过示波器Scope和Scope1观察x(t)和θ(t)的波形图如下所示。
图2.x(t)波形图3.θ(t)波形
(24)将上述系统在
的条件下线性化,则方程组改写成如下形式:
在Simulink中对系统仿真如下所示。
图4.线性化后仿真系统
通过示波器模块可以观察输出信号,图形如下图所示。
图5.x(t)输出波形
图6.θ(t)输出波形
实验二.典型系统时域响应动、静态性能和稳定性研究;
已知系统的开环传递函数为
(1)利用已知的知识判断该开环系统的稳定性(系统的特征方程根、系统零极点表示法)。
(2)判别系统在单位负反馈下的稳定性,并求出闭环系统在
内的脉冲响应和单位阶跃响应,分别绘制出相应响应曲线。
(5)该系统的特征方程的根、零极点表示的求解代码如下:
clear;
clc;
p=[111];%构造多项式系数行向量
disp('方程特征根为:
')%输出字符
r=roots(p)%求解以p为系数的多项式的方程的根
num=[1];%构造分母多项式系数行矩阵
den=[111];%构造分子多项式系数行矩阵
[P,Z]=pzmap(num,den);%求解系统零极点
pzmap(num,den);%画出零极点分布图
输出结果如下图所示。
图7.特征方程求根结果
图8.零极点分布图
从图中可以看出两个极点在虚轴上,所以该系统处于临界稳定状态。
(6)求解阶跃响应和脉冲响应的程序代码如下:
num1=[1];%构造分子多项式系数行矩阵
den1=[111];%构造分母多项式系数行矩阵
[num2,den2]=cloop(num1,den1,-1);%求解闭环传递函数
printsys(num2,den2);%打印出以num2,den2为分子分母的系统函数
[P,Z]=pzmap(num2,den2);%求解以num2,den2为分子分母的系统函数的零极点
pzmap(num2,den2);%画出以num2,den2为分子分母的系统函数的零极点
[y,x,t]=impulse(num2,den2,10);%求解脉冲响应
subplot(1,2,1);%画子图像1
plot(t,y);%画出图像
gridon;%开启网格
xlabel('时间');%设置x轴标题
ylabel('脉冲响应');%设置y轴标题
[y,x,t]=step(num2,den2,10);%求解阶跃响应
subplot(1,2,2);%画子图像2
plot(t,y);%画出图像
gridon;
xlabel('时间');
ylabel('阶跃响应');
该系统的脉冲响应和阶跃响应图如下。
图9.系统脉冲响应和阶跃响应图
实验三.控制系统的频率特性研究;
针对如右图所示系统,已知被控系统G(s)的传递函数为:
(1)要求画出该闭环系统的根轨迹曲线图(随K变化)
(2)求出该闭环系统的传递函数T(s),并画出当K=2该闭环系统的Bode图,并分别在图中求出闭环系统的相角裕度与幅值裕度。
(4)由图可以看出系统的特征方程为
下面画出随K变化的闭环系统的根轨迹曲线图,代码如下:
num=1;%构造分子系数行向量
den=[110];%构造分母系数行向量
sys=tf(num,den)%以num,den为分子分母构造传递函数sys
fork=1:
1:
5
rlocus(feedback(k*sys,1));%k从1到5步长为1变化,画出闭环反馈系统的根轨迹
holdon;%保持图像
end
holdoff;%放开对图像的保持
运行程序可以得到根轨迹如下图所示。
图10.随K变话系统根轨迹图
系统的传递函数为
下面给出计算代码如下:
clear;
clc;
num=1;%构造分子系数行向量
den=[110];%构造分母系数行向量
sys=tf(num,den)%以num,den为分子分母构造传递函数sys
fork=1:
1:
5
rlocus(feedback(k*sys,1));%k从1到5步长为1变化,画出闭环反馈系统的根轨迹
holdon;%保持图像
end
holdoff;%放开对图像的保持
sys2=feedback(2*sys,1)%构造闭环反馈系统函数
margin(sys2);%画出系统的波特图
gridon;
程序的输出结果和波特图如下所示。
图11.系统求解传递函数输出
从波特图上的信息可以看出:
当
时,系统有
,相角裕度为
当
时,系统有相角为180°,增益裕度为
图12.闭环系统波特图
实验四.线性系统校正.
针对如左图所示系统,已知系统被控系统G(s)的传递函数为:
(1)当比例控制器增益K=1时,在Matlab/Simulink中搭建仿真系统,当输入为阶跃函数时,用示波器Scope观测系统的输出,绘出响应曲线。
并将对象输出y(t)与时钟输出输入Workspace中,编程求出系统的响应时间、调节时间及超调量,并将计算结果与根据理论公式计算值相比较。
(2)调节控制器增益,使超调量
,且稳态误差
,给出此时K值的范围。
(3)如果想使稳态误差
,应考虑将上述的比例控制器该为何种控制器,即选用比例积分控制器,或比例微分控制器,或比例、积分与微分控制器,试从超前/滞后校正理论论证,并绘出对应的响应曲线。
(3)K=1时在Simulink中搭建的仿真系统如下图所示。
图13.K=1时仿真系统
利用示波器观察输出结果可以看到如下波形
图14.K=1时仿真系统输出波形
下面将输出结果导出到Workspace中,利用ToWorkspace模块替换Scope将系统输出导入为矩阵y如下图所示,并编程计算相关的参数。
图14.导出系统输出数据
具体程序代码如下:
ymax=max(y);%求出数组y中的最大值
ys=y(length(t));%求输出数据y在稳定时的值ys
pos=(ymax-ys)/ys;%求解稳超调量
n=1;
whiley(n)n=n+1;
end
tr=t(n)%将求出的响应时间赋值
L=length(t);%求时间数组长度
while(y(L)>0.98*ys&y(L)<1.02*ys)%利用循环求解调节时间
L=L-1;
end
ts=t(L)%将调解时间赋值
ess=1-ys%调节时间赋值
程序的输出结果如下:
系统超调量为pos=0.1188系统响应时间为tr=1.6211
系统调节时间为ts=2.2319系统稳态误差为ess=0.5000
通过理论计算算出系统参数如下:
系统超调量为pos=0.1202系统响应时间为tr=1.801
系统调节时间为ts=0.584
(4)调节系统放大器增益,利用上题程序计算参数。
①当K=4时,结果如下:
pos=0.3045tr=1.3249ts=2.5070ess=0.2000
可以看出此时稳态误差正好在0.2,超调量满足要求。
②当K=4.386时,结果如下:
pos=0.3200tr=1.3125ts=2.4251ess=0.1857
可以看出此时超调量正好在32%,稳态误差满足要求。
③当K>4.386或者K<4时都不满足要求
所以所求K的范围为4(3)
选用比例微分积分控制器,设定其参数为:
P=6I=1D=0.3
在放大器后增加PID控制器如下图所示。
图15.增加PID控制器后的系统
通过示波器观察到系统的输出波形如下。
图16.增加PID控制器后的系统输出波形
从波形图可以看出稳定后系统输出为1,符合稳态误差为0的要求。
 升级会员
升级会员 