第1章协调控制系.docx
《第1章协调控制系.docx》由会员分享,可在线阅读,更多相关《第1章协调控制系.docx(13页珍藏版)》请在冰豆网上搜索。
第1章协调控制系
第1章单元机组负荷自动控制系统
§1-1协调控制系统的基本任务
一、基本任务
协调锅炉和汽机的操作和运行,在保证机组安全稳定运行前提下,使机组对负荷变化具有较快的响应速度。
1.负荷控制对象
被控量:
机组功率、主汽压力
控制量:
燃烧率、主汽调门
2.对象特点
锅炉惯性大(慢),汽机惯性小(快)
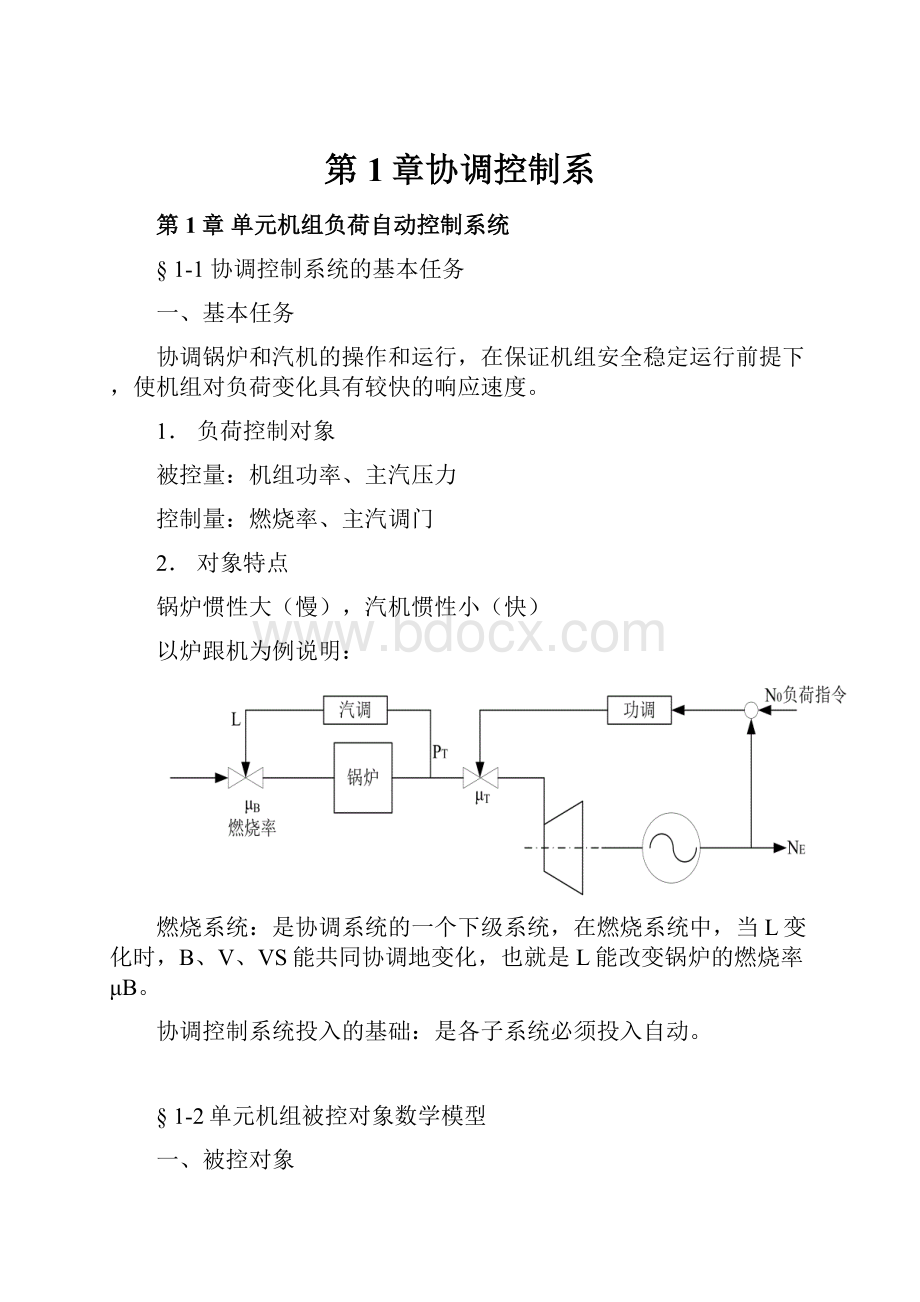
以炉跟机为例说明:
燃烧系统:
是协调系统的一个下级系统,在燃烧系统中,当L变化时,B、V、VS能共同协调地变化,也就是L能改变锅炉的燃烧率μB。
协调控制系统投入的基础:
是各子系统必须投入自动。
§1-2单元机组被控对象数学模型
一、被控对象
被控对象包括锅炉和汽轮机本身的系统:
两个输入量:
μB:
锅炉的燃烧率。
μT:
汽机调节阀的开度变化。
两个输出量:
NE:
单元机组的输出电功率;
PT:
机前蒸汽压力。
WPB(s)、WNB(s)——当汽机调门开度不变时,燃烧率μB变化引起机前压力PT和输出功率NE改变的传递函数。
WPT(s)、WNT(s)——当锅炉燃烧率不变时,汽机调门开度μT变化引起机前压力PT和输出功率NE改变的传递函数。
多变量过程传递函数矩阵:
二、动态特性
各传递函数的阶跃响应曲线如下:
对象特点:
锅炉快,汽机慢。
§1-3协调控制系统的组成及功能
一、组成
1.负荷指令处理回路
●主要任务:
是根据机炉的运行状态,将外部的负荷要求处理为机组可以接受的功率给定值N0。
●外部负荷指令通常有:
(1)电网中心调度所的负荷分配指令;ADS——中调指令;
(2)机组运行人员的负荷指令;
(3)电网频率自动调整的指令。
●负荷处理回路组成
机组功率运算回路:
将外部负荷指令处理成机组可能接受的功率指令;
负荷运算回路:
根据机组状况对机组允许承担的负荷进行估计;
2.机组主控回路
●任务:
根据负荷处理后的指令N0,协调地向机炉各子系统发出指令μB和μT,使机组的实发功率迅速跟踪N0的变化;并保证机组的稳定性。
(必须使主蒸汽压力在规定的范围内变化)
●控制策略:
要根据对象特点,设计合理的控制策略。
二、功能
协调控制系统应具有以下八个方面的功能:
1.负荷指令选择
●正常情况:
ADS指令、频差指令、人工手动设定指令都可接受;
●非正常情况:
只允许接受人工手动设定指令。
2.负荷指令变化率限制
●将阶跃信号变为斜坡信号;
●负荷变化率:
额定负荷的3%-5%/min。
3.最大和最小负荷限制
●根据辅机运行台数和负荷偏差计算出机组最大允许的负荷指令;
●对负荷指令限幅、限速,得到实际负荷指令。
4.快速减负荷(RUNBACK)功能
●当给水泵、送引风机等辅机发生故障时,能自动地以预定速率减小机组负荷,并正常运行(甩负荷保护);
●不同辅机故障的RUNBACK按不同的最大允许负荷和变化率进行;
●当发生RUNBACK时,控制系统自动转入汽机跟随方式,直到运行人员重新设定。
5.运行方式选择
●机炉协调方式:
机组无故障时;
●汽机跟随方式:
锅炉故障时,锅炉控制功率,汽机控制压力;
●锅炉跟随方式:
汽机故障时,汽机控制功率,锅炉控制压力;
●机炉手动方式:
锅炉、汽机都故障时。
●方式切换:
自动、无扰动切换(发生故障或故障解除,系统能自动、平稳地切换到自动化程度最高的运行方式)。
6.闭锁、迫升、迫降、保持功能
●当主要辅机工作在极限状态,或主要流量与设定值的偏差超出允许范围时,应对机组负荷及相关指令进行增/减闭锁;
测量值小于设定值(跟不上增):
机组负荷指令闭锁增;
测量值大于设定值(跟不上减):
机组负荷指令闭锁减;
●当故障不明时,采用保持功能。
7.整个控制系统应具有足够的稳定性裕量和较好的整体性;
8.当机组因事故与电网解列时,应有必要的安全措施(如启动旁路控制系统等)
§1-4机炉主控制器的设计
●任务:
根据功率指令N0,如何协调地改变燃烧率指令μB和汽机调门开度μT,使机组的实发功率NE快速地跟踪功率指令N0,同时保证机前压力PT在有限的范围内变化(保证机组的稳定性)。
1.4.1炉跟机控制方式
●汽机控制功率,锅炉控制压力
KB(s):
锅炉主控制器的传递函数;
KT(s):
汽机主控制器的传递函数;
●动作过程:
N0↗—△N↗—汽机侧调节器KT(s)首先动作—μT↗:
①μT↗(初始由于燃烧率未变,主要靠锅炉释放蓄热)—NE↗;
②μT↗—PT↘—KB(s)动作—μB↗—NE↗。
调节结束后:
NE=N0,PT=P0。
●系统的特点:
当N0↗时,由于利用了锅炉的蓄热,机组的输出功率上升较快,但由于锅炉释放了蓄热,因此,机前压力PT迅速下降,动态偏差较大。
1.4.2机跟炉控制方式
●锅炉控制功率,汽机控制压力
●动作过程:
N0↗——△N↗——锅炉侧调节器KB(s)首先动作——μB↗:
①μB↗——PT缓慢↗——△P<0——μT↗——PT快速↘、NE↗;
②μB↗——NE↗(由于锅炉惯性大,上升较慢)。
调节结束时,同样能保证:
NE=N0,PT=P0。
●特点:
当N0变化时,首先改变锅炉的燃烧率,由于锅炉的惯性大,因此,NE变化慢,机组适应负荷变化的能力较差;而另一方面,这种运行方式使机前压力PT的波动较小。
1.4.3以锅炉跟随为基础的协调控制系统
●炉跟机的特点:
⑴输出功率NE响应速度较快——优点保持;⑵汽压变化大——需要改进。
●改进设想:
由于汽压变化大,系统应该能够防止|PT-P0|在动态过程中出现太大的动态偏差。
设想:
ⅰ.△P变化过大,是由于μT变化过大引起的,因此,当△P超过一定值时,必须要限制μT的进一步变化;ⅱ.在μT变化的同时,没有及时变化μB,必须要使μB及时变化。
●改进措施:
ⅰ.采用非线性元件限制PT的动态偏差;
PT-P0>△——通过非线性元件,限制了汽机进汽阀进一步开大——从而限制了进一步扩大;
反之,PT-P0<-△——通过非线性元件,限制了汽机进汽阀进一步关小——从而限制了PT-P0进一步减小。
ⅱ.以N0作为前馈信号,及时改变μB。
显然,当N0↗时,在快速μT↗的同时,μB也快速上升。
——△P较小,NE的跟踪速度更快。
1.4.4以汽机跟随为基础的协调控制系统
●机跟炉特点:
在功率指令N0变化时,实发功率NE的响应慢,而汽压变化小。
●NE响应慢的原因:
是锅炉具有较大的惯性和迟延;即当μB变化时,NE、PT的变化有较大的惯性。
●改进设想:
(i).当N0变化时,使μB的变化更快,以补偿锅炉的惯性。
●措施:
以N0的比例微分作为μB的前馈信号。
(ii).当N0↗时,如果锅炉能放出一部分蓄热,则能加快实发功率NE的响应速度。
要利用锅炉的蓄热,就应该有意识地让汽压在允许范围内变化。
●措施:
采用非线性元件,有意改变汽压设定值。
当N0-NE>0(加负荷时)时——降低汽压的定值——通过汽机调节阀,μT↗——迅速增加NE(利用锅炉蓄热);
N0-NE<0(减负荷时)时——提高汽压设定值(贮存部分蓄热)——通过汽机调节器,μT↘——迅速减小NE。
1.4.4基于能量信号的协调控制
一、能量信号作为前馈的协调控制系统
(i).该系统可看作是以炉跟机为基础的协调控制系统。
(ii).汽机调节阀开度变化指令μT:
第一项:
是前馈信号,作用:
加快功率响应速度;
第二项:
是调节器输出,动态时校正功率偏差,保证稳态时,NE=N0。
(iii).锅炉侧燃烧率控制指令μB:
第一项:
主要作用是压力校正,调节结果使得稳态时PT=P0;加入(D)是为了加强锅炉侧的动作速度;
第二项:
P1[1+K2(P0-PT)]代表了汽机对锅炉的能量要求信号,代表了进入汽机的能量信号。
作用也是加快锅炉动作,以补偿锅炉的惯性。
●锅炉的前馈信号选择:
信号x:
①功率指令N0;②汽机向锅炉的能量要求信号。
(1)采用N0作前馈:
当N0变化时,由于汽机侧发生某些故障未动作,照理锅炉侧也不动,但采用了N0前馈,μB改变,从而引起主汽压力变化;
(2)采用汽机能量要求信号:
汽机未动,能量要求信号不变,μB也不变。
●能量要求信号:
①Forboro公司采用P1[1+K2(P0-PT)];
②L&N(LeedsandNorthrup)公司采用P1P0/PT。
实际上,这两个公式近似相等:
当PT变化较小时,1/PT近似常数K。
P1/PT实际上反映了汽机调节阀开度μT的变化;
二、直接能量平衡(DirectEnergyBalance)协调控制系统
美国LeedsandNorthrup公司,简称DEB系统。
(i).该系统可看作是炉跟机为基础的协调控制系统。
(ii).汽机侧是以P1作为导前反馈信号的串级系统:
●P1的反馈:
实际上是蒸汽流量信号的反馈,因此,P1在某种程度上,提前反映了机组实发功率NE的变化,可减小NE的动态偏差。
●外回路:
PI调节器接受功率偏差(N0-NE),目的是动态时校正功率偏差,使在稳态时,能有N0=NE。
●前馈信号:
N0经PD对μT的前馈信号,目的是为了加快汽机的动作速度,最终加快输出功率的响应速度。
(iii).锅炉侧
●主调节器PID:
接受两个信号:
①汽机能量要求信号的比例微分,②反馈信号为锅炉的热量信号。
●热量信号
(1)物理解释:
锅炉受热面吸收的热量,一部分到流入汽机蒸汽流量D中,另一部分被锅炉储存起来。
(2)蓄热系数的整定
原理:
QD只反映燃料量,当μT阶跃,而B不变时,QD应不变。
从0→t1对上式积分,得:
,
注意到:
在t=0时刻,△Pb(0)=0,而△Pb(t1)=Pb(t1)-Pb(0)。
所以
。
上式分子是t=0~t1之间累计流量,令
。
分母Pb(0)-Pb(t1)是从0到t1时刻的变化量。
●稳态:
PT=P0?
PD
在稳态时输出:
P1P0/PT(微分环节稳态时,输出为0)。
热量信号稳态时:
P1(稳态时,dPb/dt=0)
所以稳态时,有P1P0/PT=P1,即P0/PT=1,PT=P0。
思考题
1.简述协调控制系统的基本任务。
2.当燃烧率指令、汽机调门指令分别作阶跃变化时,主汽压力和实发功率如何变化?
为什么?
3.试画出协调控制系统的基本结构。
4.BF和TF运行方式的优缺点,画出并说明改进方案。
5.简述直接能量平衡DEB协调控制方案。
 升级会员
升级会员 