重复控制器的基本思想和稳定性分析概述.docx
《重复控制器的基本思想和稳定性分析概述.docx》由会员分享,可在线阅读,更多相关《重复控制器的基本思想和稳定性分析概述.docx(16页珍藏版)》请在冰豆网上搜索。
重复控制器的基本思想和稳定性分析概述
二重复控制基本思想和稳定性分析
2.1重复控制基本思想
重复控制的基本思想源于控制理论中的内膜原理,内膜原理是把系统外部信号的
动态模型植入控制器内,在稳定的闭环系统中包含外部输入信号的数学模型,以构成高精度的反馈控制系统。
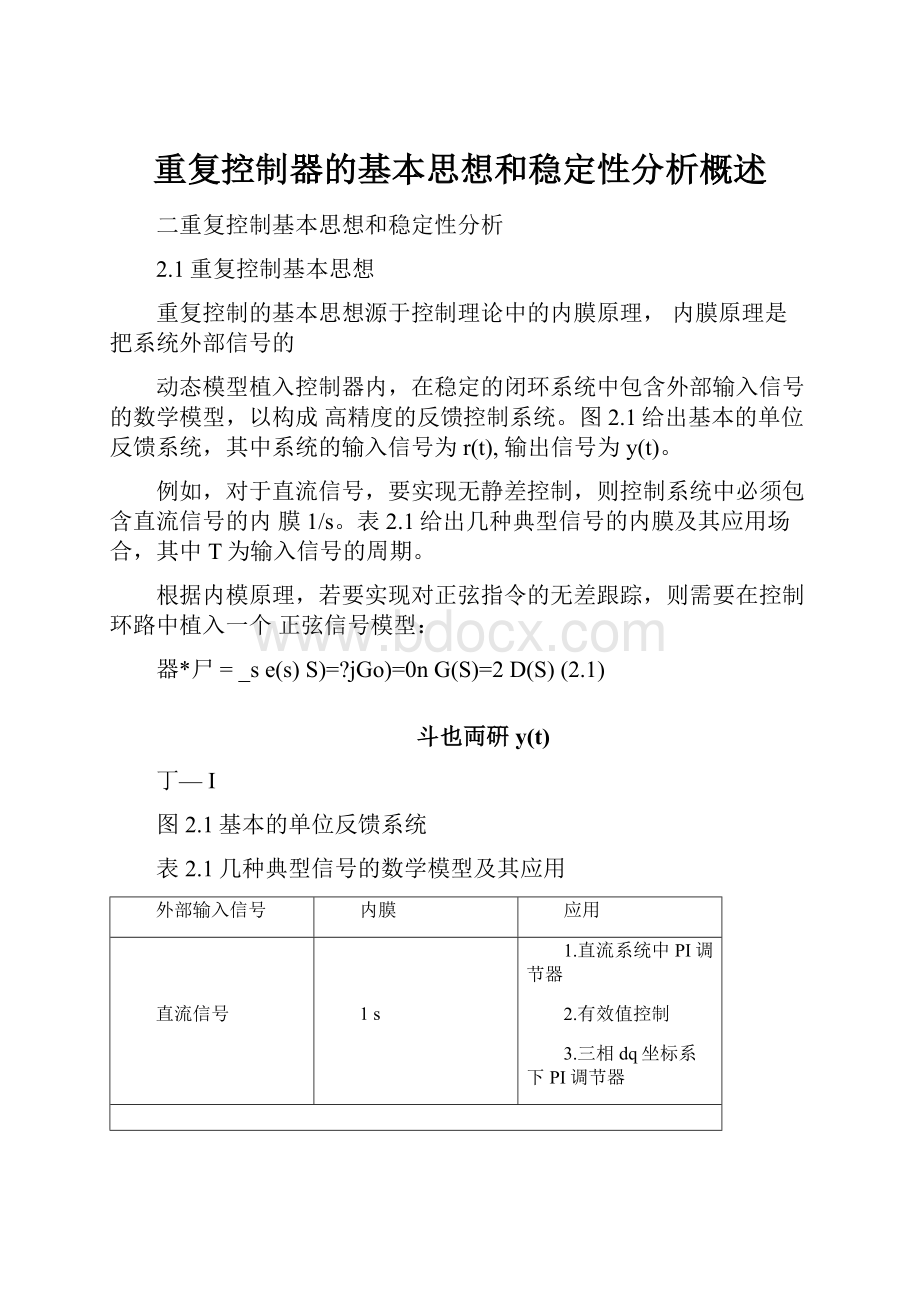
图2.1给出基本的单位反馈系统,其中系统的输入信号为r(t),输出信号为y(t)。
例如,对于直流信号,要实现无静差控制,则控制系统中必须包含直流信号的内膜1/s。
表2.1给出几种典型信号的内膜及其应用场合,其中T为输入信号的周期。
根据内模原理,若要实现对正弦指令的无差跟踪,则需要在控制环路中植入一个正弦信号模型:
器*尸=_se(s)S)=?
jGo)=0nG(S)=2D(S)(2.1)
斗也両硏y(t)
丁—I
图2.1基本的单位反馈系统
表2.1几种典型信号的数学模型及其应用
外部输入信号
内膜
应用
直流信号
1s
1.直流系统中PI调节器
2.有效值控制
3.三相dq坐标系下PI调节器
正弦信号
2CO
22s+o
比列谐振控制器(PR)
周期信号
-sTre
“-sTr
1-e
重复控制
图2.2给出包含周期信号内膜的重复控制器的实现过程。
图中N=T/Ts,其中为Ts
控制器离散过程中的采样周期。
图2(c)中前向通道中的z-N为纯延时环节,其中正反馈回路等效为周期信号的内膜。
式(2.2)给出u(z)和e(z)的关系,可以看出重复控制器实际上每个N拍(N个采样周期)对误差进行一次累积,其作用实际上与PI调节器类似。
表2.2给出几种典型调节器的基本作用的对比。
图2.2重复控制器的实现
(2.2)
u(z)=u(z)z占e(z)=u(k)=u(k-N)e(k)=u(k)=e(k)e(k—N)e(k—2N);IH
表22几种典型信号的数学模型及其应用
连续域PI调节器
离散域PI调节器
重复控制器
对误差信号连续积分
母隔一个采样周期对误差信号累积
每隔N个采样周期对误差信号累积
图2.3给出了图2.2(c)中各个点的波形,可以看出重复控制器实际上是对输入信号的逐周期叠加,当输入衰减至零时,输出仍不断重复与上周期相同的信号。
若将重复控制器置于控制系统的前向通道中,当输入误差不为零时,重复控制器的输出会逐周期地增长,直到误差完全消除,即实现无差跟踪。
但是也可以看出,由于重复控制器中纯延时环节z-N的存在,其输出相对于输入延迟了N拍。
因此在暂态过程中,重复控制器延迟N拍之后才能逐周期响应。
图2.3重复控制器各个点波形
2.2重复控制的稳定性分析
图2.3给出基于理想重复控制器构成的闭环反馈系统,其中Gp(z)。
式(2.3)给出系
统输出与输入及扰动之间的关系。
系统稳定的充分必要条件是闭环传递函数的所有极
点位于单位园内,即满足式(2.4)。
在满足此条件下,系统可以实现无静差控制,并且能完全抑制扰动的影响,如式(2.5)和(2.6)所示。
但是实际系统中控制对象很难满足式(2.4)。
因此,实际系统中通常采用图2.4所示的结构。
图2.4中Q(z)为改善系统稳定性的函数,可以取为低通滤波器,也可以取为小于
1的常数,S(z)为补偿函数。
式(2.4)给出系统输出与输入及扰动之间的关系。
系统稳定的充分必要条件是H(z)=Q(z)—Gp⑵Hi2S(z)在全频段位于单位圆内,其中最理想的情况是H(z)=0。
2.3两中典型的复合控制策略
前面分析过,合理设计参数,采用重复控制器能实现无静差控制。
但是在暂态过程中,由于重复控制器延迟一个周波输出,因此其调节速度很慢。
实际系统中,常采样复合控制,例如采用PI调节器和重复控制器相结合。
稳态时,系统主要有重复控
制器调节,暂态过程中主要由PI调节器调节。
典型的复合控制系统有嵌入式和并联
式两种,如图2.5和2.6所示。
图2.5并联式复合控制结构
2.3.1嵌入式复合控制的稳定性分析
式(2.14)实际上为单独采用PI调节器时系统的闭环传递函数系统稳定性条件为
Q(z)_S(ziGpi©尸姑⑺勺+Gpi(z戸i2Gp(z
2.3.2并联式复合控制的稳定性分析
其中Ai和陞的表达式分别为
(2.19)
.=1■Gpi\zHi2Gp(ziI
[’,Hi2Gp(z)1
Qz-Sz__
|L-1GpizHi2Gpz
2.3.3两种控制结构的比较
(1)两种复合控制方式调节的基本概念
为了进一步分析采用“PI+重复控制”能达到无静差的调节目的,将图2.5和图
2.6重新整理为图2.7。
可以看出:
1)嵌入式复合控制实在系统出现输入输出不相等时,通过调整输入(即指令值)
量,使得输出量等于预期值。
例如,假设r(z)为系统输出量的期望,当y(z)vr(z)时,Ae>0,重复控制器输出为正值,此时控制系统的输入变为r'z)=r(z)+AeGRp(z),即系统指令增大,在pi调节器的作用下,输出量增大,此时尽管系统存在稳态误差,但是只需
要y(z)趋于r(z),系统进入稳态。
此过程可以用图2.8形象的表示。
2)并联式复合控制结构在系统出现输入输出不相等时,重复控制器和pi控制器
同时响应误差信号,两者输出之和作为调制信号,从而改变输出量,直到yQ=r(z),
系统进入稳态
(b)
图2.7两种复合控制结构闭环调节的概念
图2.8通过调整指令达到无静差调节的示意图
(2)两种复合控制方式的稳定性
由上一节分析可知并联式复合控制系统稳定的条件是:
1)系统单独采用PI调节
器时,稳定工作;2)系统采用重复控制器后满足式(2.22)o
对于嵌入式复合控制系统,系统稳定的条件是满足式(2.15)。
实际上考虑到暂态
过程中,重复控制器延时一个周波后响应,在此期间主要有PI调节器响应,因此仍
然希望系统单独采用PI调节器时能稳定工作,并且还需要保证一定的带宽和稳定裕度。
(3)两种复合控制方式的设计
由前文分析可知,为了保证复合控制系统的稳定性,首先是单独采用PI调节器时,系统能稳定工作,并且保证一定的带宽和稳定裕度。
其次采用重复控制器后,系统仍然能稳定工作。
显然设计的难点在于补偿函数S(z)的设计。
系统单独采用PI调节器时,其环路增益为T=Gpi(z)Hi2Gp⑵。
采用两种复合控制结构,对于重复控制器而言,其控制对象和稳定性判据的表达式如表2.3所示。
对比两者可以看出:
1)采用嵌入式结构,补偿函数S(z)更容易实现。
因为其控制对象为单独采用PI
调节器的系统闭环传递函数。
通常若设计合理,闭环传递函数的在低于带宽处接近为
1,带宽附近存在谐振峰,高频段快速衰减。
S⑵只需要抵消系统的谐振峰和补偿系统的相位。
2)采用复合控制后,系统抗扰动的能力加强。
但是采用嵌入式结构,其抗扰动的
效果不仅受重复控制器的影响,还受PI调节器的影响。
而采用并联式结构,只要重
复控制器设计合理,系统就能获得比较好的抗扰动特性。
表2.3两种复合控制结构的对比
嵌入式结构
并联式结构
重复控制器的控制
对象
Gco(Z耳不
GCfz_Hi2GP(z)
kJCO1厶戸“‘
'厂1+T
稳定判据
¥严(岛<1
抗扰动特性
y(z)Gdfz\
y(z)摯)
d(z)一1+T知i2Gp(zpRp(zG(z)
d(z)^F^Hi2G^z^R^z)
2.4本章小结
本章首先阐明重复控制器的基本概念,然后分析其稳定性。
针对于两种典型的复合控制方式,详细分析了其实现无静差的原理,详细比较了两种控制方式下的稳定性以及抗扰动特性。
本章关于重复控制器的分析是全文的基础。
三逆变器独立运行
第一章提到过光伏并网逆变器有三种工作模式:
独立运行,并网运行和带本地负载并网运行。
实际上,在考虑本地负载后,系统需要优先保证本地负载供电,有多余能量,贝U馈入电网。
系统带本地负载并网运行过程中,一旦电网出现故障,系统需要切换到独立运行模式。
因此必须先研究系统独立运行时的情况。
图3.1给出两级式光
伏并网逆变器独立运行时示意图。
光伏电池
DC/DC
变换器
双向
DC/DC
变换器
DC/AC
逆变器
PCC
负载
电网
图3.1逆变器带本地负载运行
ZLd
图3.3两类典型的负载
r•
1
|
ZLd厂
Z
(b)
(a)线性负载(b)非线性负载
R
A
o
ZLd
Vr(Z)
t
t
t
io(s)
VAB(S)
1
Zc(s)
-1z
Zli(S
Hi
21S3-l匚有
iL1
C
「Hv卜
图3.4逆变器独立运行时控制示意图
图3.5不对称规则采样SPWM基本原理
S2忙右S4-IL2J!
Vin
N=8
GateDrive
Modulator
JkVref(z)
iL1(s)
VC(s)
Kpwm
Hi"*
Vref⑵■咎^Gv(z)-*®-*
IL一J—
4
t」
-i
1+1
Lt」
片1
1+f
k
k+2
k+4
k+6
k+8
k+10|
k+12
k+14|
k+16
k+1k+3k+5k+7k+9k+11k+13k+15
图3.5逆变器独立运行时控制框图(采用PI调节器+重复控制)
b(s)
图3.5逆变器独立运行时控制框图(负载电流前馈)
图3.6逆变器独立运行时等效控制模型
在图3.1中,输出电压给定、控制算法实现和PWM信号的生成,均利用DSP芯片TMS30F2812实现。
其中PWM信号的生成采用不规则采样法,如图3.2所示。
可
以看出,生成PWM信号一般包括采样、计算、装载和调制四个过程[29]。
具体而言,A/D采样芯片在第k时刻对电感电流和输出电压进行采样,经输出电压外环和电感电流内环运算后,在第k+1时刻将运算结果装载到DSP的CMPRx寄存器中,并一直保持到下一个采样时刻。
该运算结果与对应的TxCNT寄存器(该寄存器内的值描述的是载波信号)内的值进行比较,当二者匹配时,PWM引脚电平发生翻转。
可以看出,装载时刻和采样时刻存在一拍滞后,而装载和调制过程含有一个零阶保持器G°h(s)。
一拍滞后的传递函数Gd(s)的连续域和离散域表达式分别表示为:
Gd(skTd十(3.1)
Gd(z)=1/z(3.2)
零阶保持器的时域表达式为:
根据图3.1(b),可得图3.3所示的离散域双闭环方框图。
虚线部分是为了便于分析设置的理想采样开关,图中所有的采样开关是以相同的采样周期Ts同步工作的。
 升级会员
升级会员 