实验三控制系统SIMULINK仿真.docx
《实验三控制系统SIMULINK仿真.docx》由会员分享,可在线阅读,更多相关《实验三控制系统SIMULINK仿真.docx(11页珍藏版)》请在冰豆网上搜索。
实验三控制系统SIMULINK仿真
实验三控制系统SIMULINK仿真
一、实验目的
1、学习Simulink的基本操作及系统仿真及参数设置;
2、学习SIMULINK中建立系统模型及求系统响应;
3、学习SIMULINK中命令行仿真方式;
二、实验内容
1、Simulink的基本操作及参数设置
(1)运行Simulink,认识常用的标准模块及模块的基本操作;
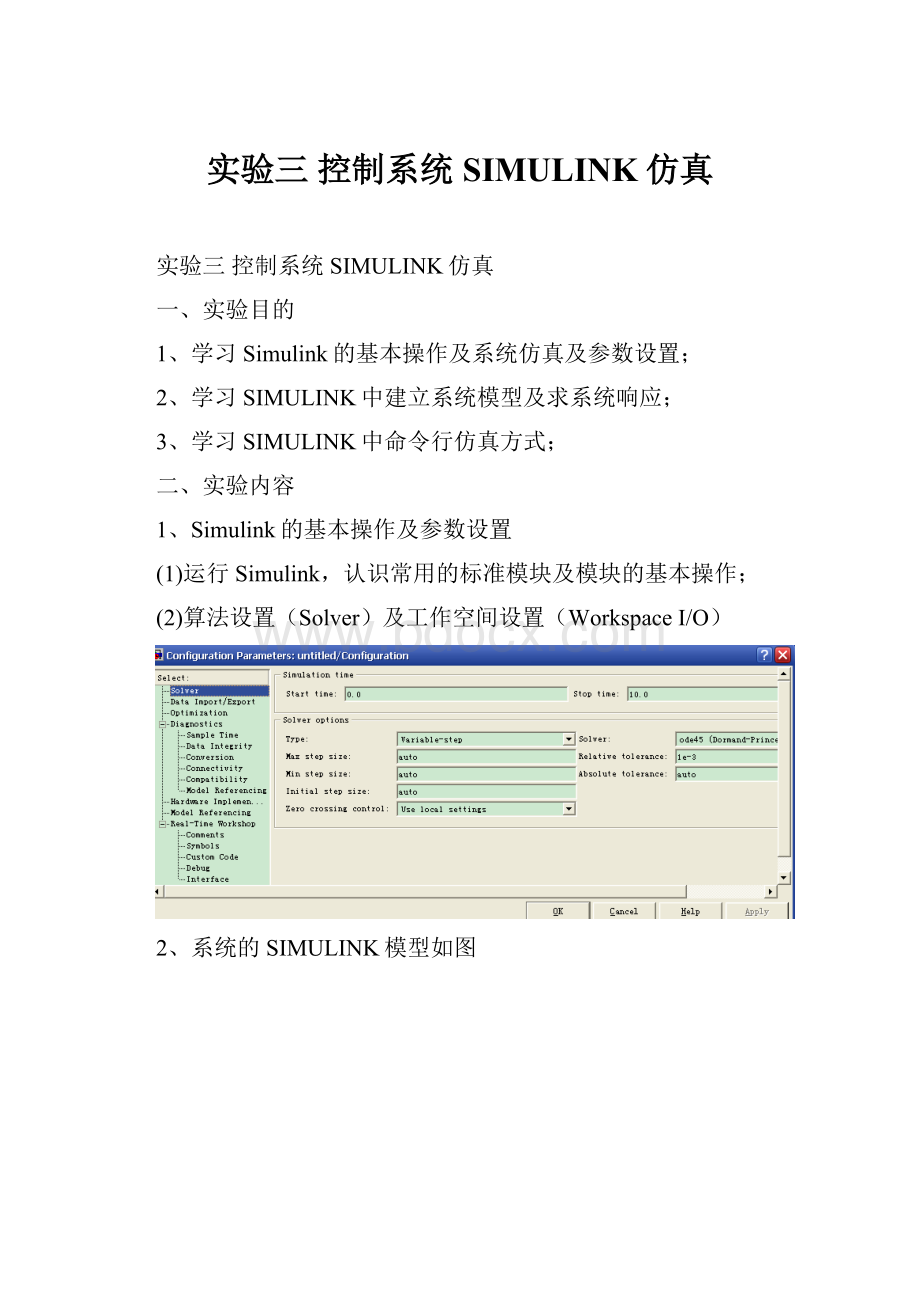
(2)算法设置(Solver)及工作空间设置(WorkspaceI/O)
2、系统的SIMULINK模型如图
(1)K=50,记录图示三处(Scope,Scope1,Scope2)的波形,分析系统的稳定性并给出稳态误差;
Scope
Scope1
Scope2
如上图可知此时系统稳定。
(2)K=200,记录图示三处的波形,根据曲线分析系统的稳定性。
与实验一得出的结论进行比较。
Scope
Scope1
Scope2
如上图可知此时系统不稳定。
由1、2可得系统比例系数增大,闭环系统的灵敏度增加,稳态误差减小,系统振荡增强;比例系数超过某个值时,闭环系统可能变得不稳定。
3、计算机控制系统仿真
已知一个计算机控制系统结构图如图:
假设采样时间分别为0.1s和0.5s,观察系统的输出y(t)和采样保持器的输入信号。
采样时间0.5s时:
Scope
程序如下:
plot(tout,y)
holdon
stairs(tout,y);
grid
holdoff
运行结果:
采样时间0.1s时:
Scope
程序如下:
plot(tout,y)
holdon
stairs(tout,y);
grid
holdoff
运行结果:
4、控制系统命令行方式仿真
已知系统的SIMULINK模型如图,利用sim命令对该系统进行仿真,仿真时间为10s,输入为幅值为1的正弦信号,利用plot命令绘制输出响应:
Untitled3
(1)使用Simulink仿真参数对话框中的WorkspaceI/O从MATLAB工作空间中获得输入信号;
1、程序如下:
t=0:
0.1:
10;
u=sin(t);
sim_input=[t',u'];
2、
运行。
3、plot(t,u,tout,yout,'--')
运行结果:
(2)使用sim命令的ut参数获得系统输入信号。
Untitled3
程序如下:
t=0:
0.1:
10;
u=sin(t);
sim_input=[t',u'];
[tout,x,yout]=sim(‘untitled5');
plot(t,u,tout,yout,'--')不可以符号
t=0:
0.1:
10;
u=sin(t);
sim_input=[t',u'];
[tout,x,yout]=sim('untitled5');%使用命令行sim进行系统仿真
plot(t,u,tout,yout,'--')可以
运行结果:
 升级会员
升级会员 