一种精确的基于扭矩发动机模型.docx
《一种精确的基于扭矩发动机模型.docx》由会员分享,可在线阅读,更多相关《一种精确的基于扭矩发动机模型.docx(14页珍藏版)》请在冰豆网上搜索。
一种精确的基于扭矩发动机模型
一种精确的基于扭矩的发动机模型(通过学习扭矩和油门位置相关性)
摘要:
最近几年,集成车辆控制系统,已经发展到用来提高燃油的经济性和安全性。
因此,发动机控制系统变换成由油门/燃料/点火控制来实现发动机扭矩需求的系统。
本文介绍了基于扭矩的发动机控制技术(火花点火引擎提高转矩控制精度利用反馈控制算法和一种气流传感器。
1、简介
电子控制已广泛应用于电动汽车系统,它不仅在发动机控制系统,而且在整车控制里也用到。
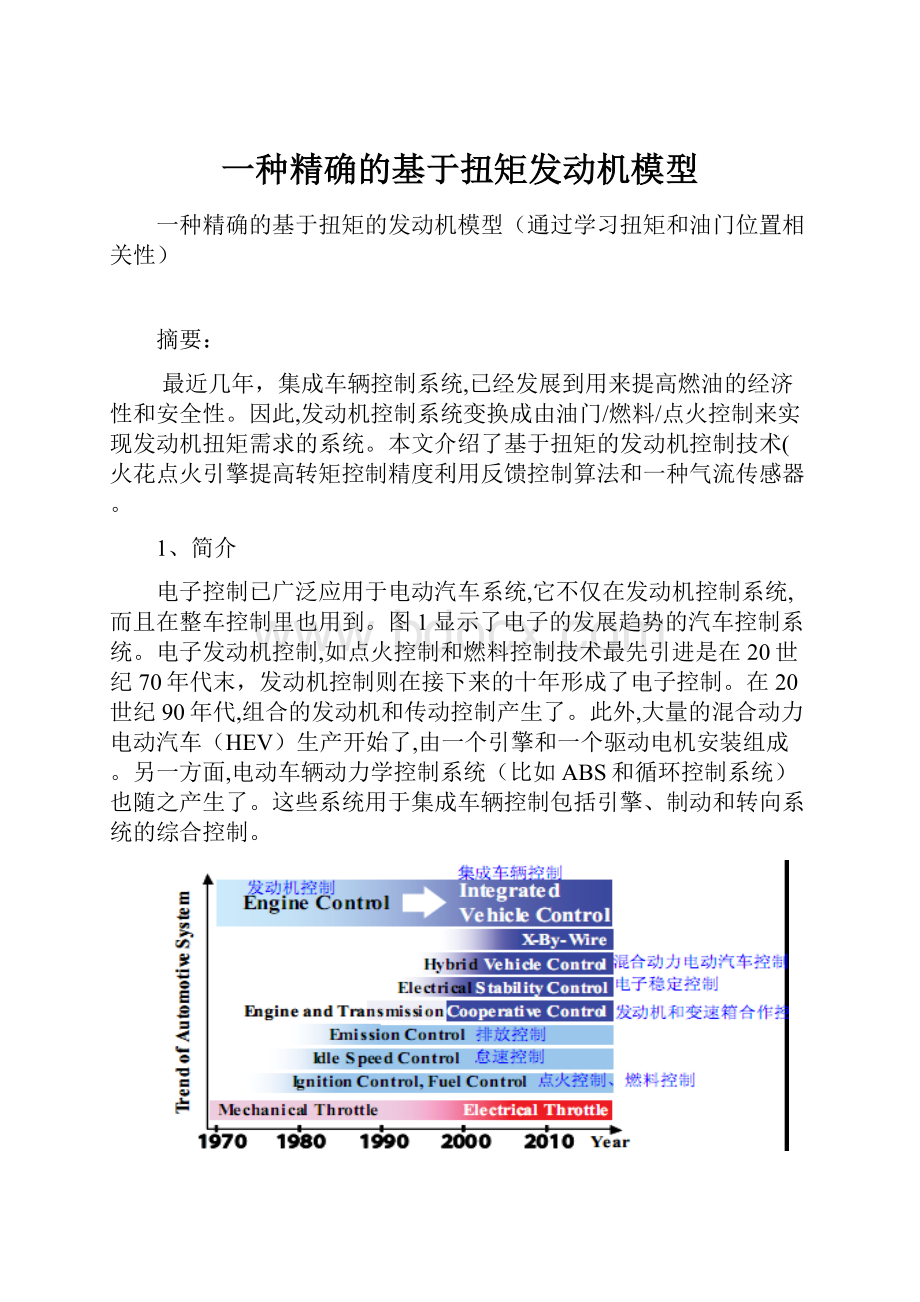
图1显示了电子的发展趋势的汽车控制系统。
电子发动机控制,如点火控制和燃料控制技术最先引进是在20世纪70年代末,发动机控制则在接下来的十年形成了电子控制。
在20世纪90年代,组合的发动机和传动控制产生了。
此外,大量的混合动力电动汽车(HEV)生产开始了,由一个引擎和一个驱动电机安装组成。
另一方面,电动车辆动力学控制系统(比如ABS和循环控制系统)也随之产生了。
这些系统用于集成车辆控制包括引擎、制动和转向系统的综合控制。
图1汽车控制系统趋势
图2显示的是一个集成车辆控制系统。
主控制器通过网络完全控制发动机、变速箱、电机、电池、以及刹车系统,并且考虑到系统的安全、环境和舒适。
车辆的控制信号是基于扭矩的与牵引转矩和制动扭矩相似。
这就是为什么在这个系统中,作为致动器引擎产生牵引扭矩。
因此,基于扭矩(扭矩需求)的发动机控制是一种重要的技术,广泛应用于OEMs和大学。
作者试著改进转矩的控制精度,通过混合控制进气反馈控制与学习地图控制。
图2集成车辆控制系统
学习地图控制被广泛地使用着。
特别值得注意的是,为满足排放的规定,该精确控制地图在A/F控制(空燃控制)中是必不可少的。
另一方面,如此精确的控制技术没有被应用于转矩控制(进气控制)是因为社会和工艺的原因。
其中一点是一个引擎转矩控制的错误是不受法律约束如废气排放控制。
另一点是很难实现学习地图控制因为进气和油门的位置是高度非线性的。
但是,从操作性能和集成车辆操控系统的角度看,现在对发动机扭矩控制精度已经变得越来越重要了。
因此,本文详细描述了改进学习地图控制技术应用于转矩控制中。
2、基于扭矩的发动机控制
2.1基于扭矩的发动机控制的概念
图3基于扭矩的发动机控制
基于扭矩的发动机控制常用在今天的汽车。
图3显示的是基于扭矩的发动机控制的结构。
在这个系统中,发动机扭矩是由一个目标节流阀的位置、许多燃油截止缸、点火时间,这些参数是由以下程序来决定。
(1)基于位置传感器的油门踏板,驱动程序需要获得的发动机扭矩。
(2)一个理想的扭矩在安全、车内舒适方面选择所需的扭矩的外部设备,如牵引力控制系统和巡航控制,和扭矩要求的驱动。
选定的扭矩为发动机的目标扭矩。
(3)一个目标油门的位置,许多燃油截止缸,点火时间是确定的,因此发动机扭矩与先前设定的目标过程是相同的。
这三个变量被转移到相配的制动器。
图4进气控制算法(改进前的,仅F/F控制)
图5表速转矩和进气的关系
进气控制在控制发动机扭矩中应用电子控制的油门是有必要的。
图4说明了一个标准正反馈(F/F)操作装置将会在以后有所改进。
控制有两个地图功能。
首先是为了获得目标进气流量从目标转矩根据试验结果在一个A/F=14.7和点火时间=MBT(最好扭矩的最小的增长)如图5。
另一个是获得目标节气阀的位置从标准化的目标进气流量在试验基础上的速度如图6。
该控制算法处理图4显示如下:
-目标转矩被转换成示意图1中的目标进气量的比率,示意图1正是基于转矩转化效率对于空气燃油混合比和点火提前角的要求的修正(比如,在认识燃烧运行方式时,催化剂加热就可以应用于点火提前角的延迟)
-目标进气在给定的发动机转速获得归一化进气流动下以最大气流被分开。
-从规范进气和发动机转速来看,目标油门的位置通过地图功能二来估算。
图6进气归一化以及油门位置的关系
在发动机控制里,外部设备的接口是‘转矩’如前所述的基于扭矩的发动机控制是与外部设备高度兼容的,并能很容易地并入集成底盘控制系统。
基于扭矩的发动机控制,也能改善操作灵活性如果目标转矩预计镇压底盘振动(取决于加速或减速)。
2.2基于扭矩的发动机控制的发展目标(趋势)
基于扭矩的发动机控制过程如图3是由目标转矩计算和扭矩转换。
前者要产生最理想的目标扭矩才能达到一个舒适的乘车。
后者产生的指令是与启动器有关的引擎扭矩导致发动机的扭矩输出与目标的扭矩相同。
在这篇文章中我们集中于改善后后一进程的准确性,因为转矩控制里的误差折衷于最优目标扭矩。
转矩控制的目标是:
-指示扭矩误差少于5Nm
-制动扭矩误差小于10Nm
3提高扭矩控制的精度
3.1分析的扭矩控制的误差因素
基于扭矩的发动机控制中的扭矩误差控制已经被实验验证。
转矩控制的目标精确的控制着制动扭矩。
另一方面,制动力矩是通过减少指定的扭矩燃烧所产生的摩擦力矩中获得的。
因此,我们首先要关注表明扭矩。
通过燃烧压力传感器来测量表明扭矩安装如图7。
表1列出了发动机规格试验车辆。
燃烧压力传感器放在一个汽缸里,它的信号是由Pi仪表来处理。
结果表明,平均有效压力被转化为表明转矩:
Ti=PiV/4π
Ti:
表明扭矩[Nm)Pi:
表示平均有效压力[Pa]V:
发动机位移(m
)
图7表明转矩测量系统
切记,燃料与扭矩密切相关,燃油量的注射由适当比例的进气流(由空气流量传感器来判断)来决定,因为在测试车辆里的燃油喷射系统是基于L型叶特朗尼克(L-Jetronic)系统。
因此,一个测量进气流量的误差能预料对指示的扭矩可产生巨大影响。
为阐明这一影响,我们还测量了除了表明转矩之外的进气流;其结果如图8。
进气流和标明扭矩都有超过目标10%的误差。
指示扭矩的最大误差大约15[Nm],大大超过目标5〔海里)。
尽管如此,这两个错误在趋势和振幅方面都是相似的。
这意味着显示扭矩误差源于进气误差,从而改善进气控制对目标扭矩的精度是非常重要的。
图8试验结果表明前转矩控制算法的改进
3.2进气控件的误差因素分析
进气控制的一个误差因素分析如图9。
进气控制困难在这里被认为有两个原因。
一是进气与油门位置是强非线性,使确定一个目标油门的位置困难。
如图6,当油门的位置是少于20°,归一化的进气改变会影响节流阀位置的微弱改变,这种反应是在发动机转速较低时是值得强调的。
因此,当目标油门的位置是设定为示意图功能在第二章节所提到的,大小和解决网格等示意图上的功能必须设置,改变地图的数据,甚至在图6的敏感地区都不能使控制的精度恶化,。
目标油门的位置也可依物理模型以进气多样化代替地图功能。
在这种情况下,一个准确的模型能描述这种非线性如图6是必要的。
进气控制困难的第二个原因是空气密度随温度和压力有所改变。
同样的油门的位置,进气的质量可以不同(取决于天气或驾驶状态)。
即使在给定的时间和地点来足够精确的调谐地图函数和物理模型,当环境改变的情况下进气控制的误差会发生。
图9进气控制的错误因素分析
3.3改善进气控制
为了处理这些因非线性和环境的变化造成的进气控制困难的,前馈单独控制并不能充分满足这个扭矩目标的精度。
所以,我们提出了一种新的进气控制方法:
加入反馈控制。
图10阐明了我们的研究的三种不同的组合前馈-回馈控制。
想法C是被推荐的控制。
想法A是用燃烧压力传感器测量指示扭矩。
基于目标扭矩误差,反馈控制为目标油门的位置计算修正数据。
然而,燃烧压力传感器不常用在生产汽车,主要取决于费用问题[3]。
想法B是用空气流量传感器代替燃烧压力传感器,空气流量传感器广泛地用于发动机控制。
因此反馈控制精通于进风流而不是扭矩。
图10改善进气控制的方法
图11估计显示转矩和进气的关系
图11是描述了每循环进气的指示扭矩散点图,显示空燃比A/F=14.7和点火时间设置成MBT。
这个图揭示了线性的和鲁棒性以及指示扭矩可以精确预估之间的关系。
因此,更换传感器是合情合理的。
一个值得关心的问题是很难设计一个反馈控制的收益,不正确的收益会引起扭矩错误,或在最糟糕的情况下调速不匀。
为弥补反馈控制的缺点,我们在想法B中增加了一个地图功能。
这个地图功能可以即时的更新通过学习检索中使用的测试值和插值.想法C是被推荐的控制,它将在下一章节作详细的讨论。
4所推荐的操作装置和实验结果
4.1进气控制与学习地图功能
该进气控制与学习地图功能见插图12和图13。
该控制的实验结果如图14。
这个控制用图形作了讨论。
图12进气学习控制的流程图
(1)前馈控制
基于图11,目标转矩被转化为目标气流,从目标油门的位置获得非线性地图功能,如图6.前馈控制对上述误差因素事比较敏感的。
事实上,图14的扭矩和进气都偏离了目标。
(2)组合前馈-反馈控制
只有当转速和进气几乎不变的情况下,反馈控制开始生效,联合前馈-反馈控制才开始,。
这个反馈控制有一个积分器,能微调目标油门的位置。
有了这个反馈控制,进气和转矩错误均能同时减少。
为了避免震荡,反馈控制开始1秒后(即使它没有融合)终止。
反馈控制的输出在每次控制终止时被储存在地图功能上。
所以即使是它是在融合前终止,它也不能很好地补偿进气出错,这张地图功能在每次学术评价储存时逐渐变得精确。
(3)学习地图功能
反馈控制进行了修正油门位置的数据,直到它被终止。
当反馈控制终止时,修正数据都被储存在三维地图功能,如图13。
地图的坐标轴是发动机转速和发动机负荷。
两者都有8个点,所以8
8矩阵有64个修正数据。
价值标准是设置在关于转速和负荷最近的地点。
当修正数据被用于地图上的控制输出功能,这个功能是一个有环绕4点的内插值。
(4)前馈控制的学术价值
反馈控制完成后,纠正目标油门位置是有学习地图功能来完成的。
校正值的恢复取决于引擎转速、负荷和添加到原先的目标油门的位置(前馈控制而产生的)。
通过该操作装置,进风流和指示扭矩与他们的投放范围的偏差减少了。
前面提到的插值创造了一个顺畅的油门位置,这意味着这个被推荐的控制对对操作灵活性有一点影响。
图14进气学习控制的时间图表
4.2学习地图功能进气流控制的实验结果有
图15显示了实验结果表明所推荐的控制。
这个目标转矩和转速的程序类似于图8。
然而完成学习地图功能,测试员驾驶车辆在不同条件下对底盘动力计大约30分钟
进气的偏差扭和指示扭矩与他们的目标大幅度减少,从指示扭矩的错误降低到4.7[Nm),实现目标5〔Nm)。
在这个实验中,油门目标位置的最大纠正值是4°。
然而没有转矩震荡来恶化舒适旅行,当修正数据从地图功能上恢复时多亏了插值。
图15指示转矩控制算法改进后试验结果
5结论
随着大量电控油门及车辆控制汽车生产,基于扭矩发动机控制有望成为标准的发动机控制。
本文中我们讨论了改善转矩控制精度,是目前在基于扭矩控制中最重要的问题之一。
(1)为获得准确的引擎制动器转矩控制,我们针对指示力矩可以由电控油门及喷油嘴控制。
实验表明,指示转矩和进气是有线性关系的。
因此,我们控制进气而不是控制指示扭矩。
(2)只利用前馈控制是很难准确的控制进气,因为进气以及油门位置是高度非线性的,也因为温度和压力是随着操作条件改变的。
因此,我们推出了联合前馈-反馈控制与学习的地图。
(3)所提出得联合前馈-反馈控制与学习地图有一个进气的气流传感器反馈回路。
在指示扭矩误差小于5Nm的发展目标已经实现了。
参考
1.T.Bertram,etal.:
CARTRONIC-AnOpenArchitectureforNetworkingtheControlSystemsofanAutomobiles,SAETechnicalPaper980200(1998)
2.N.Heintz,etal.:
AnApproachtoTorque-BasedEngineManagementSystems,SAE2001-01-0269(2001)
3.N.Sugitani,etal.:
CombustionPressureSensorforToyotaLeanBurnEngineControl,SAETechnicalPaper930882(1993)
 升级会员
升级会员 