#超声波测距倒车雷达方案选择说明.docx
《#超声波测距倒车雷达方案选择说明.docx》由会员分享,可在线阅读,更多相关《#超声波测距倒车雷达方案选择说明.docx(8页珍藏版)》请在冰豆网上搜索。
#超声波测距倒车雷达方案选择说明
方案选择说明
超声波测距主要应用于倒车雷达、建筑施工工地以及一些工业现场,例如:
液位、井深、管道长度等场合。
目前国内一般使用专用集成电路设计超声波测距仪,但是集成电路的成本很高,并且没有显示操作使用不方便。
本文介绍AT89S52单片机为核心的低成本、高精度、微型化数字显示超声波测距仪的硬件电路和软件设计方法。
实际证明该仪器工作稳定,性能良好。
系统总体方案的设计
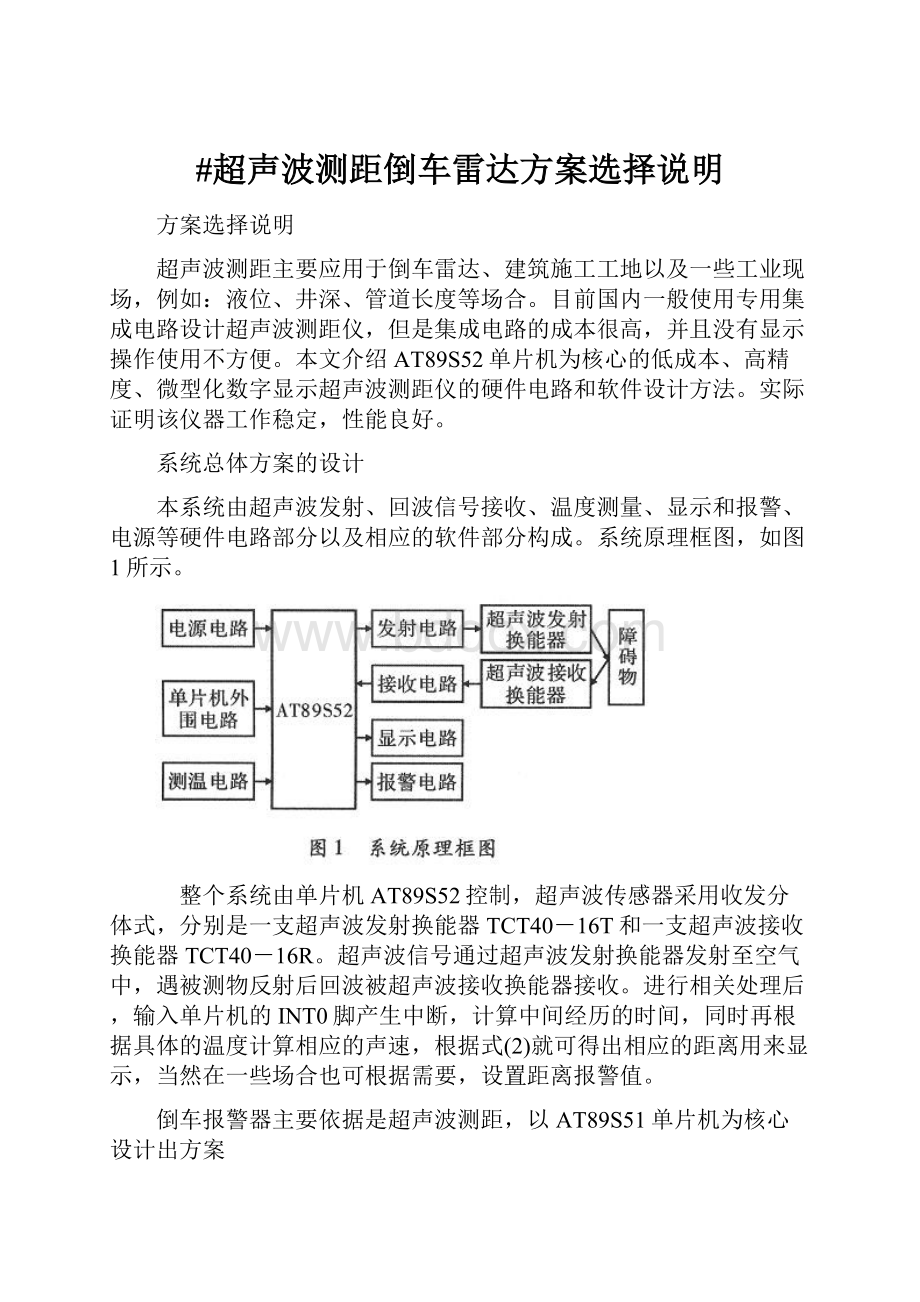
本系统由超声波发射、回波信号接收、温度测量、显示和报警、电源等硬件电路部分以及相应的软件部分构成。
系统原理框图,如图1所示。
整个系统由单片机AT89S52控制,超声波传感器采用收发分体式,分别是一支超声波发射换能器TCT40-16T和一支超声波接收换能器TCT40-16R。
超声波信号通过超声波发射换能器发射至空气中,遇被测物反射后回波被超声波接收换能器接收。
进行相关处理后,输入单片机的INT0脚产生中断,计算中间经历的时间,同时再根据具体的温度计算相应的声速,根据式
(2)就可得出相应的距离用来显示,当然在一些场合也可根据需要,设置距离报警值。
倒车报警器主要依据是超声波测距,以AT89S51单片机为核心设计出方案
1.超声波测距原理
超声波测距是通过不断检测超声波发射后遇到障碍物所反射的回波,从而测出发射和接收回波的时间差t,然后求出距S=Ct/2,式中的C为超声波波速。
由于超声波也是一种声波,其声速C与温度有关,表1列出了几种不同温度下的声速。
在使用时,如果温度变化不大,则可认为声速是基本不变的。
如果测距精度要求很高,,则应用通过温度补偿的方法加以校正。
声速确定后,只要测得超声波往返的时间,即可求得距离。
这就是超声波测距的机理。
表1声速与温度关系表
温度(C)
-30
-20
-10
0
10
20
30
100
声速(米/秒)
313
319
325
323
338
344
349
386
2.AT89S52的功能特点
AT89S52是一个4K字节可编程EPROM的高性能微控制器。
它与工业标准MCS-51的指令和引脚兼容,因而是一种功能强大微控制器,它对很多嵌入式控制应用提供一个高度灵活有效的解决方案,AT89S52具有以下特点:
4K字节的EPROM,128字节RAM、32根I/O口线、2个16位定时器/计数器、5个向量二级中断结构、1个全双向串行口、并且内含精密模拟比较器和片内扩展器,具有4。
25V至5。
5V的电压工作范围和12MHZ/24MHZ的工作频率,同时还具有加密阵列的二级程序存储器加锁、掉电和时钟等。
此外,AT89S52还支持二种软件可选的电源节电方式。
空闲时,CPU停止,而让RAM,定时/计数器、串行口和中断系继续工作。
可掉电保存RAM的内容,但可使振荡器停止以禁止芯片所有的其它功能直到下一次硬件复位。
AT89S52有2个16位计时/计数器寄存器T0、T1。
作为一个定时器,每个机器周期寄存器增加1,这样寄存器即可计数机器周期。
因此,可以对外部的输入端P3。
2/INT0和P3。
3/INT1编程,便于测量脉冲宽度的门。
充分利用AT89S51的片内资源,即可在很少外围电路的情况下构成功能完善的超声波测距系统。
3.超声波发射部分
超声波发射部分是为了让超声波发射换能器TCT40-16T能向外界发出40kHz左右的方波脉冲信号。
40kHz左右的方波脉冲信号的产生通常有两种方法:
采用硬件如由555振荡产生或软件如单片机软件编程输出,本系统采用后者。
编程由单片机P1.0端口输出40kHz左右的方波脉冲信号,由于单片机端口输出功率不够,40kHz方波脉冲信号分成两路,送给一个由74HC04组成的推挽式电路进行功率放大以便使发射距离足够远,满足测量距离要求,最后送给超声波发射换能器TCT40-16T以声波形式发射到空气中。
发射部分的电路,如图2所示。
图中输出端上拉电阻R31,R32,一方面可以提高反向器74HC04输出高电平的驱动能力,另一方面可以增加超声换能器的阻尼效果,缩短其自由振荡的时间。
4.超声波接收部分
上述TCT40-16T发射的在空气中传播,遇到障碍物就会返回,超声波接收部分是为了将反射波(回波)顺利接收到超声波接收换能器TCT40-16R进行转换变成电信号,并对此电信号进行放大、滤波、整形等处理后,这里用索尼公司生产的集成芯片CX20106,得到一个负脉冲送给单片机的P3.2(INT0)引脚,以产生一个中断。
接收部分的电路,如图3所示
可以看到,集成芯片CX20106在接收部分电路中起了很大的作用。
CX20106是一款应用广泛的红外线检波接收的专用芯片,其具有功能强、性能优越、外围接口简单、成本低等优点,由于红外遥控常用的载波频率38kHz与测距的超声波频率40kHz比较接近,而且CX20106内部设置的滤波器中心频率f0五可由其5脚外接电阻调节,阻值越大中心频率越低,范围为30~60kHz。
故本次设计用它来做接收电路。
CX20106内部由前置放大器、限幅放大器、带通滤波器、检波器、积分器及整形电路构成。
工作过程如下:
接收的回波信号先经过前置放大器和限幅放大器,将信号调整到合适幅值的矩形脉冲,由滤波器进行频率选择,滤除干扰信号,再经整形,送给输出端7脚。
当接收到与CX20106滤波器中心频率相符的回波信号时,其输出端7脚就输出低电平,而输出端7脚直接接到.AT89S52的INT0引脚上,以触发中断。
若频率有一些误差,可调节芯片引脚5的外接电阻R42,将滤波器的中心频率设置在40kHz,就可达到理想的效果。
5.其他主要电路
(1)温度测量部分。
由于声音的速度在不同的温度下有所不同,为提高系统的精度,采用了温度补偿功能。
这里采用的主要元器件是是美国Dallas半导体公司生产的单总线数字温度传感器DS18B20,其具有精度高、智能化、体积小、线路简单等特点。
将DS18B20数据线与单片机的P1.1口相连,就可以实现温度测量,如图4所示。
(2)LCD显示部分。
本设计显示部分采用字符型TC1602液晶显示所测距离值。
TC1602显示的容量为2行16个字。
液晶显示屏有微功耗、体积小、显示内容丰富、超薄轻巧、使用方便等诸多优点,与数码管相比,显得更专业、美观。
使用时,可将P0与LCD的数据线相连,P2口与LCD的控制线相连,如图5所示。
其中,TC1602第4脚RS为寄存器选择,第5脚RW为读写信号线,第6脚E为使能端。
第7~14脚:
D0~D7为8位双向数据线。
这里要注意的是,为了布线方便,单片机端的D0~D7是接到LCD/602的D1~D0,正好相反,因此在编写软件时需要做处理,使读取正确。
(3)报警部分。
采用一个蜂鸣器,由P1.2输出一定频率的信号,在连接到蜂鸣器之前,经过一个三极管9012的放大。
报警部分的连线,如图6所示。
(4)电源电路:
220V经9V变压器降压后,再经D1~D4桥式整流和7805稳压后给电路各部分供电。
(5)晶振电路:
采用12MHz的晶振。
系统硬件电路设计
电路图如下一张所示
AT89S52通过外部引脚P1。
6输出脉冲宽度为250us,载波为40KHZ的10个脉冲的脉冲群,以推挽形式加到变压器的初经升压变换推动超声波换能器发射出去。
在发射的同时,P1。
7输入一个高电平启动,给电容C4充电。
发射结束时高电平翻转为低电平,C4开始对R2、R3组成的分压器放电并输出到比较器的负端。
超声波接收将接收到的障碍物反射的超声波送到放大器进行放大,这是一个高增益、低噪音放大器,在对放大后的信号进行检波后将检测回波送到比较器的正端。
发射时P1。
7输出的电平可以抑制比较器的翻转,这样就可以抑制发射器的超声波直接辐射到接收器而导致错误检测。
超声波测距原理,我们必须测出回波和发射脉冲之间的时间间隔,利用S=Ct/2就可算出距离,再在LCD上显示出来。
当然还可以设置若干个键,以用来控制电路的工作状态。
限制系统大测距离存在的四个因素:
超声波的幅度,反射的质地,反射而和入射声波之间的夹角以及接收换能器的灵敏度。
接收器对声波脉冲的直接接收能力将决定最小的可测距离。
系统软件设计
AT89S52单片机和其开发应用系统具有语言简洁、可移植性好、表达能力强、表达方式灵活、可进行结构化设计、可直接控制计算机硬件,生成质量高、使用方便等诸多优点。
超声波测距仪就是用AT89S51单片机开发设计的。
它采用模块计,由主程序、发射子程序、定时子程序、显示子程序等模块组成。
软件分为两部分:
主程序和中断服务程序,流程图如图2所示。
主程序完成初始化工作及超声波发射和接收控制。
中断服务程序包括定时中断服务子程序和外部中断服务子程序,分别完成超声波的发射、距离计算及显示报警等工作。
图2测距报警系统程序流程图
测试结果
当距离大于2m时,绿灯闪亮,显示距离;当距离小于1m时,红灯闪亮,由端口RB2驱动蜂鸣器报警,显示距离;当距离介于2m和1m之间时,红灯闪亮,显示距离。
为提高抗干扰能力,系统连续发射超声波,测量三次,从中剔除最大最小值,取中间值计算出距离。
 升级会员
升级会员 