四川大学自动控制原理11期末试题解答及评分标准B卷精.docx
《四川大学自动控制原理11期末试题解答及评分标准B卷精.docx》由会员分享,可在线阅读,更多相关《四川大学自动控制原理11期末试题解答及评分标准B卷精.docx(13页珍藏版)》请在冰豆网上搜索。
四川大学自动控制原理11期末试题解答及评分标准B卷精
四川大学自动控制原理1-1期末试题解答及评分标准(B卷
(2010—2011学年第1学期
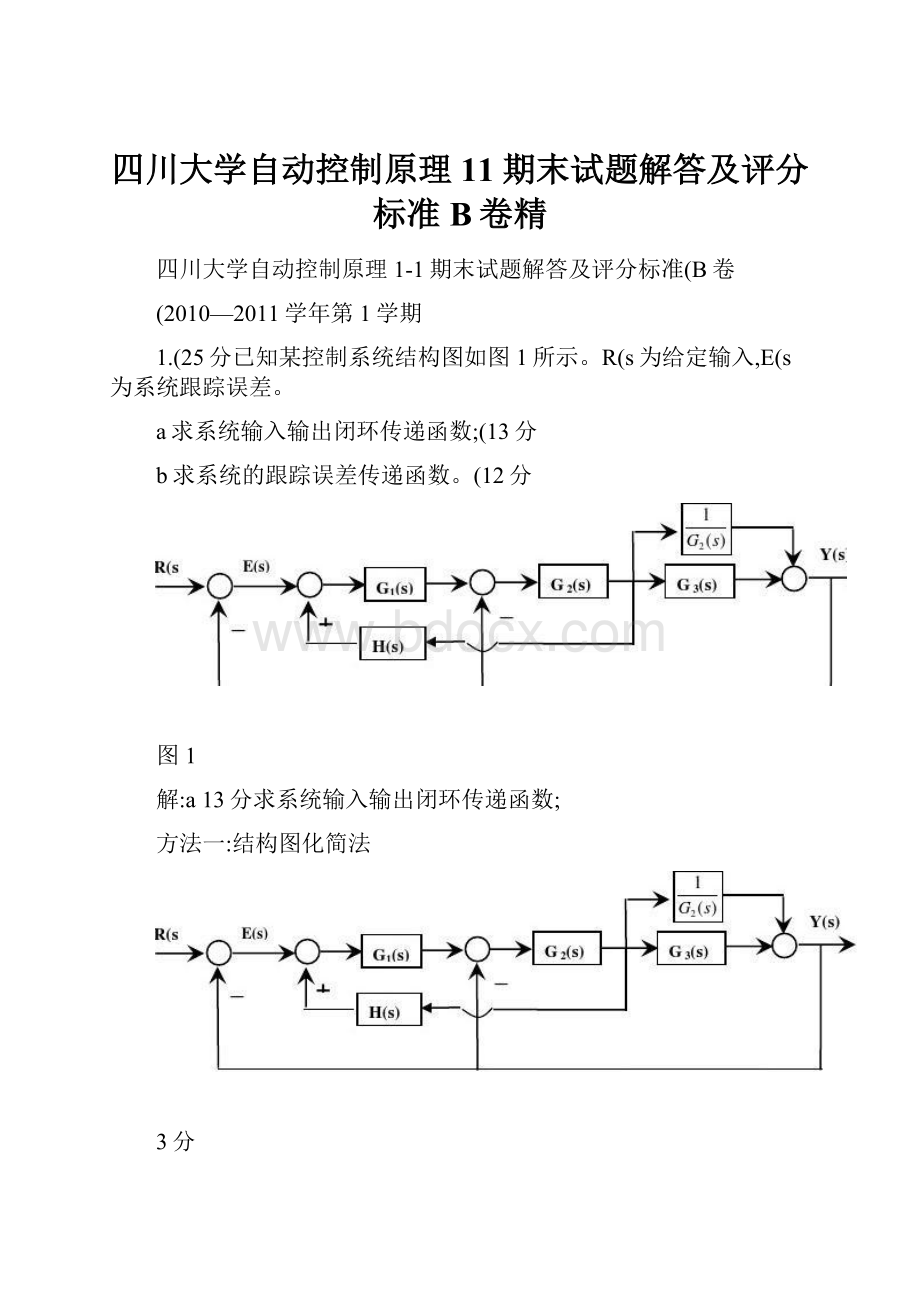
1.(25分已知某控制系统结构图如图1所示。
R(s为给定输入,E(s为系统跟踪误差。
a求系统输入输出闭环传递函数;(13分
b求系统的跟踪误差传递函数。
(12分
图1
解:
a13分求系统输入输出闭环传递函数;
方法一:
结构图化简法
3分
2分
2分
2分
4分
方法二:
梅逊公式法:
2=n1分
(((211sHsGsGL=1分
(((3212sGsGsGL-=1分13-=L1分(14sGL-=1分
((325sGsGL-=1分(((((((((221321321sHsGsGsGsGsGsGsGsG-+++=∆2分(((3211sGsGsGP=1分11=∆1分(12sGP=1分12=∆1分
(((((((((2(((((
(213213213211sHsGsGsGsGsGsGsGsGsGsGsGsGsRsY-++++=
∴
1分b12分求系统的跟踪误差传递函数。
方法一:
结构图化简法
1分
1分
2分
2分
2分
分
2分
方法二:
梅逊公式法:
1=n1分
(((211sHsGsGL=1分
(((3212sGsGsGL-=1分13-=L1分(14sGL-=1分
((325sGsGL-=1分(((((((((221321321sHsGsGsGsGsGsGsGsG-+++=∆2分11=P1分
(((((221321sHsGsGsGsG-+=∆2分
(((((((((2(((((2(
(2132132132132sHsGsGsGsGsGsGsGsGsHsGsGsGsGsRsY-+++-+=
∴
1分
E(s
2.(25分已知测速反馈控制系统的结构图如图2所示。
其中k>0。
a确定k=0时该系统的调节时间和超调量;(10分
b确定测速反馈系数k与系统阻尼比之间的关系;定性分析k对系统暂态性能的影响;(7分
c设图中E(s为系统误差,求该系统跟踪单位阶跃信号时的稳态误差;分析k是否影响系统跟踪单位
斜坡信号的稳态误差。
(8分
图2
解:
a10分确定k=0时该系统的调节时间和超调量;
系统开环传递函数为
16
G(s=
((161
ssk
++
2分
当k=0时,系统闭环传递函数为
2
16
(s=
16
ss
Φ
++
2分
4,0.125
n
ως
∴==2分
%%67.33%
e
σ=⨯=2分
3~43~4
6~8
0.5
s
n
ts
ως
===2分
b7分确定测速反馈系数k与系统阻尼比之间的关系;定性分析k对系统暂态性能的影响;
考虑k不为零时,系统闭环传递函数为
2
16
(s=
(16116
sks
Φ
+++
1分
1
4,28
nkως∴===+2分
可见当k>0时,系统阻尼比随k值增大而增大,1分当7
016
k<<时,系统为欠阻尼,单位阶跃响应振荡收敛;1分当7
16k=
时,系统为临界阻尼,单位阶跃响应单调收敛;1分当716
k>时,系统为过阻尼,单位阶跃响应单调收敛。
1分
c8分设图中E(s为系统误差,求该系统跟踪单位阶跃信号时的稳态误差;分析k是否影响系统跟踪
单位斜坡信号的稳态误差。
由劳斯判据知,在参数取值范围内该系统闭环均稳定。
2分由系统开环传递函数16
G(s=
((161
ssk++知,
该系统为Ⅰ型系统,其跟踪阶跃信号无稳态误差;2分其跟踪单位斜坡信号为有差跟踪,稳态误差为1sseK
=,其中K为开环增益。
2分对于本系统
16
K=
16k+1
因此,该系统跟踪单位斜坡的稳态误差与k的取值有关,其稳态误差为1
k16
sse=+
2分
3.(25分已知系统开环传递函数为
g2
s(s+4
(s=ks24Gs++
a画出系统的根轨迹图;(15分
b确定使系统单位阶跃响应是非振荡的kg值范围;计算当kg为何值时,闭环系统的复数极点具有阻
尼比ξ=0.707,并求相应的复数极点;(10分
解:
a画出系统的根轨迹图;
(1确定开环零点为:
z1=0,z2=-4;开环极点为:
p1=-1+j1.732,p2=-1-j1.732,应有两条分支
(3分
(2确实轴上的根轨迹,在(0,-4之间有根轨迹;(2分(3开环极点是一对共轭复根,计算极点p1的出射角
1180(11(12(12
1801203090
240
ppzpzppθ∠=+∠-+∠--∠-
=++
-
=(3分
(4分离点的坐标(4分
2222
2448,0(4(4
gssdkgsskssdsss++--=-=-=++2(即2
48ss+-=0,解得s1=5.5(不在根轨迹上和s2=-1.5
21.524
||||0.87(4
gssskss=-++=-=+
根轨迹如图所示
(3分
b解答:
当kg>0.87(分离点处时,系统单位阶跃响应是非振荡。
(3分当系统的阻尼比ξ=0.707,闭环极点的实部等于虚部(σ=ω,闭环极点表示为:
s=σ+jσ,(1分代入特征方程2
24(4|0gsjsskssσσ=+++++=(2分整理后,并设实部和虚部均为零,有方程组
2
(2440
2(1(240
kgkgkgσσσ++=+++=
-2
-1
012
RootLocus
RealAxisImaginaryAxis
求解方程得到0.309,1.236kgσ==-也即:
1,20.309,
1.2361.236kgsj==-±(4分
4.(15分某系统开环传递函数为
1(0.2ksGs
ss+=10(
(+1
试绘制其对数幅频曲线图,并计算该系统的幅穿频率cω和相位裕量ϒ。
解:
对数幅频曲线图如下所示:
低频段是一条斜率为-20dB/dec且经过(1,20dB的渐近线,在转折频率ω=1之后为一条平行于实轴的水平渐近线,在转折频率ω=5处之后为一条斜率为-20dB/dec的渐近线。
(8分在幅穿频率cω处的幅值A(jcω为
(1cAω=
=⇒222100(1(10.04cccωωω+=+(2分
2247649.8(50/ccradsωω=⇒≈,即幅穿频率cω为49.8rad/s(1分
在幅穿频率cω处的相位为:
(90((0.2cccGjarctgarctgωωω∠=-+-=-89.9︒(-90︒(2分
相位裕量
180(
9
0cGjγω=+∠≈(2分
5.(10分已知2个系统的开环极坐标图如下所示,图中P为开环传递函数具有正实部特征根的数目,试
分析由它们组成的闭环系统的稳定性,如果系统不稳定,确定不稳定的特征根数量。
Re
e
(a
(b
解:
(1由图所示可以看出,该开环系统含有两个积分环节,故需从Gk(j0+点开始补画一段半径为∞并沿逆时针方向绕过180︒的圆弧(如图虚线所示,补足后曲线顺时针方向包围(-1,j0点一周,即Nh=-1,由于P=0,于是根据奈奎斯特稳定判据有:
Z=P-2Nh=2
可以确定闭环系统不稳定,且在右半平面上有两个不稳定的系统极点。
(5分(2由图所示可以看出曲线顺时针方向包围(-1,j0点一周,即Nh=1,由于P=2,于是根据奈奎斯特稳定判据有:
Z=P-2Nh=0
可以确定闭环系统稳定。
(5分
w=0ImImw=¥w=¥Re-1w=0P=2(bReP=0(a
 升级会员
升级会员 