航天技术概论(四).ppt
《航天技术概论(四).ppt》由会员分享,可在线阅读,更多相关《航天技术概论(四).ppt(24页珍藏版)》请在冰豆网上搜索。
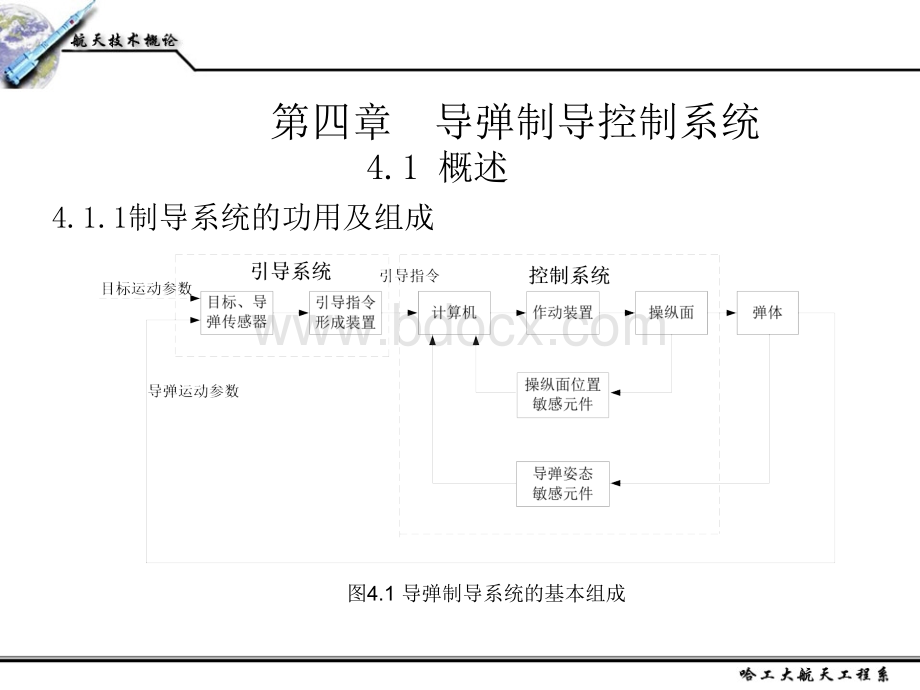
第四章导弹制导控制系统4.1概述4.1.1制导系统的功用及组成图4.1导弹制导系统的基本组成引导系统引导系统:
探测或测定导弹相对于目标或发射点的位置探测或测定导弹相对于目标或发射点的位置,按照要求的弹道,形成引导指令形成引导指令,并将引导指令传送给控制系统传送给控制系统。
由探测设备和导引指令形成装置组成。
控制系统控制系统:
响应引导系统的引导指令信息响应引导系统的引导指令信息,产生作用力产生作用力,迫使导弹改变迫使导弹改变飞行轨迹,使导弹沿着要求的弹道飞行飞行轨迹,使导弹沿着要求的弹道飞行;或者稳定导弹的飞行或者稳定导弹的飞行。
由导弹姿态敏感元件、操纵面位置敏感元件、计算机、作动装置、操纵面和弹体组成。
4.1.2制导系统的分类自主式制导:
自主式制导:
不需要从目标或制导站获取信息,完全由弹上制导设备测量周围环境的物理特性产生导引信号,使导弹沿预定弹道飞向目标的制导。
遥控式制导:
遥控式制导:
是由导弹以外的指挥站向导弹发出引导信息,使导弹飞向目标的制导方式。
自寻的制导:
自寻的制导:
是由弹上设备直接感受目标辐射或反射的各种信号(声、光、电、磁、热等)而形成控制指令实现制导。
图4.2惯性制导原理图4.2自主式制导系统定义定义惯性制导系统惯性制导系统是指利用弹上的惯性元件(陀螺、加速度计),测量导弹相对于惯性空间的运动参数(如加速度等),并在给定运动的初始条件的基础上,由制导计算机算出导弹的速度、位置等参数,并将算出的位置信息与方案计算机的预定值进行比较,形成引导指令,以导引导弹按预定弹道飞行。
4.2.1惯性制导11)加速度计)加速度计惯性元件22)陀螺仪)陀螺仪陀螺陀螺+支撑及辅助装置支撑及辅助装置陀螺仪具有陀螺仪具有定轴性定轴性和和进动性进动性。
定轴性:
转轴在惯性空间定轴性:
转轴在惯性空间保持恒定的方向。
保持恒定的方向。
陀螺进动角速度为:
进动角速度为:
陀螺仪陀螺仪发展的两个方向陀螺仪发展的两个方向11、高精度、高精度测量误差:
常值漂移和随机漂移。
测量误差:
常值漂移和随机漂移。
高精度:
高精度:
0.000010.00001/h/h中等精度:
中等精度:
0.10.1/h/h低精度:
几度低精度:
几度/h/h22、低成本、小型化、低成本、小型化陀螺的分类陀螺的分类三浮陀螺三浮陀螺(液浮、气浮、磁悬浮)液浮、气浮、磁悬浮)静电陀螺、静电陀螺、激光陀螺、激光陀螺、光纤陀螺光纤陀螺1983-1994美国各类陀螺比例美国各类陀螺比例陀螺稳定平台平台式惯导制导原理图惯性制导的分类惯性制导的分类平台式惯导和捷联式惯导平台式惯导和捷联式惯导捷联式惯导制导原理图惯导系统的优缺点1)抗干扰能力和隐蔽性强,可提供全球导航能力;2)误差随时间累计增大,需要初始对准;4.2.3地形匹配制导(terraincontourmatchingTERCOM)预先用侦察卫星或其它侦察手段,测绘出导弹预定飞行路线的地形高度数据并制成数字地图,存贮在弹上制导系统中。
导弹发射后,弹上测量装置实际测得的地形数据与存贮在弹上的数字地图进行比较,利用地形等高线匹配来确定导弹的地理位置,并将导弹引向预定区域或目标的制导。
雷达高度表气压高度表4.2.44.2.4景象匹配区域相关制导景象匹配区域相关制导(scenematchingareacorrelation)利用弹上设备实拍导弹飞行地区的景物图像(实时图),经过数字转换,与预存的基准数据阵列(基准图)在计算机中进行配准比较,来确定导弹相对于目标位置的制导技术,通常简称景象匹配制导。
4.2.5卫星导航定义:
接收导航卫星发射的无线电信号,通过解算,获得载体的位置、接收导航卫星发射的无线电信号,通过解算,获得载体的位置、速度、姿态信息,以此来形成导引指令的制导系统。
速度、姿态信息,以此来形成导引指令的制导系统。
典型的卫星导航系统美国的美国的GPSGPS前苏联的前苏联的GLONASSGLONASS中国的北斗卫星导航系统中国的北斗卫星导航系统(BDS)(BDS)1)GPS(GlobalPositioningSystem)GPS空间部分地面监控部分用户接收机:
24颗星,轨道高度2.02万千米,运行周期约为11小时58分.:
4个监控站、1个上行注入站和1个主控站GPS的工作原理:
被动式伪码单向测距三维导航GPS的导航精度P码目前己由16m提高到6m,C/A码目前己由25100m提高到12m,授时精度日前约20ns。
式中:
vti(i=1、2、3、4)分别为卫星1、卫星2、卫星3、卫星4的卫星钟的钟差,由卫星星历提供。
vto为接收机的钟差。
2)GLONASS系统由24颗卫星组成,均匀分布在3个近圆形的轨道平面上,每个轨道面8颗卫星,轨道高度19100公里,运行周期11小时15分,轨道倾角64.8。
GLONASS系统单点定位精度水平方向为16m,垂直方向为25m。
项目GPSGLONASS星座卫星数2424轨道面个数63轨道高度20183公里19100公里运行周期11小时58分11小时15分轨道倾角55度65度载波频率L1:
1575.42MHzL1:
1602.561615.50MHzL2:
1227.60MHzL2:
1246.441256.50MHz传输方式码分多址频分多址调制码C/A-码和P-码S码和P码时间系统UTCUTC坐标系统WGS-84SGS-E903)北斗卫星导航系统(BDS)BeiDou(COMPASS)NavigationSatelliteSystemBDS空间部分:
5颗静止轨道卫星和30颗非静止轨道卫星地面部分:
主控站、注入站和监测站用户部分第二阶段:
区域性无源区域性无源卫星导航系统(2012-12-27)16颗导航卫星第一阶段:
区域性有源区域性有源卫星导航系统(北斗卫星导航试验系统,“北斗一号”200020033颗地球同步卫星(2颗工作星,定点在东经80和1401颗备份星,定点在东经110.5)覆盖范围东经约70140,北纬555。
第三阶段:
全球性无源全球性无源卫星导航系统(2020年前)35颗导航卫星开放服务:
定位精度10m,测速精度0.2m/s,授时精度10ns。
指挥站发出波束(无线电波束、激光波束),控制波束自动跟踪目标。
弹上制导设备感知导弹偏离波束的方向和距离,并产生相应的引导指令,操纵导弹始终沿着波束飞向目标。
单波束系统(按三点法导引),图单波束系统(按三点法导引),图(a)(a)双波束系统(按前置点法导引)双波束系统(按前置点法导引),图图(b)(b)4.3遥控式制导4.3.1波束制导原理原理制导控制指令由弹外的制导站产生,由指令传输通道传输到导弹上,操纵导弹飞向目标。
组成组成
(1)跟踪测量装置:
跟踪测量装置:
目视的、光学的、雷达的、电视的目视的、光学的、雷达的、电视的
(2)指令形成装置指令形成装置(3)指令传输装置:
指令传输装置:
有线的、无线的有线的、无线的(4)指令接收和变换装置指令接收和变换装置分类分类目视有线指令制导目视有线指令制导(红箭红箭-73)、光学有线指令制导光学有线指令制导()、()、雷达无线指令制导雷达无线指令制导(红旗(红旗-2)、)、电视指令制导(鹰击电视指令制导(鹰击63)4.3.2指令制导雷达指令制导示意图电视指令制导工作原理图分类
(1)主动式自寻的弹上有能量发射装置。
照射到目标上,弹上有能量发射装置。
照射到目标上,被目标反射回来,被导弹接收。
被目标反射回来,被导弹接收。
(2)半主动式自寻的在导弹外有照射源。
照射到目标上,在导弹外有照射源。
照射到目标上,被目标反射回来,被导弹接收。
被目标反射回来,被导弹接收。
(3)被动式自寻的利用目标辐射的红外线或无线电波工作利用目标辐射的红外线或无线电波工作。
4.4自寻的制导主动式自寻的半主动式自寻的被动自寻的4.5复合制导目的:
提高导引精度,增加制导距离和抗扰能力提高导引精度,增加制导距离和抗扰能力。
“爱国者”MIM-104制导方式:
程序+指令+TVM程序起飞,指令修正,弹上导引头发现目标时,进入TVM制导。
“战斧”BGM-109C(海基)制导方式:
惯导+地形匹配+数字景像匹配“飞鱼”AM39制导方式:
惯导+主动雷达末制导“AIM-120A”制导方式:
惯导+指令修正+主动雷达TVM(TrackingViaMissile)制导半主动雷达寻的与指令制导的结合。
 升级会员
升级会员 