专用机床的刀具进给机构和工作台转位机构设计.ppt
《专用机床的刀具进给机构和工作台转位机构设计.ppt》由会员分享,可在线阅读,更多相关《专用机床的刀具进给机构和工作台转位机构设计.ppt(23页珍藏版)》请在冰豆网上搜索。
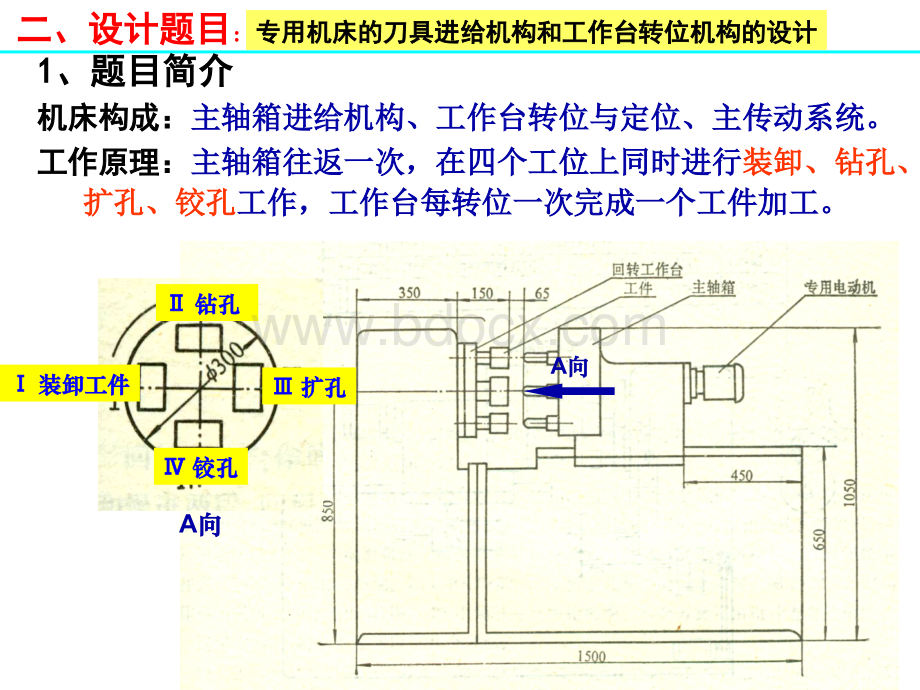
11、题目简介、题目简介机床构成:
机床构成:
主轴箱进给机构、工作台转位与定位、主传动系统。
主轴箱进给机构、工作台转位与定位、主传动系统。
工作原理:
工作原理:
主轴箱往返一次,在四个工位上同时进行主轴箱往返一次,在四个工位上同时进行装卸、钻孔、装卸、钻孔、扩孔、铰孔扩孔、铰孔工作,工作台每转位一次完成一个工件加工。
工作,工作台每转位一次完成一个工件加工。
二、设计题目二、设计题目:
专用机床的刀具进给机构和工作台转位机构的设计专用机床的刀具进给机构和工作台转位机构的设计A向向A向向装卸工件装卸工件钻孔钻孔扩孔扩孔铰孔铰孔工件长度:
工件长度:
SS;行程速比系数:
行程速比系数:
K=2K=2;刀具刀具工进速度(切削速度):
工进速度(切削速度):
VV工工(mm/smm/s);生产率:
生产率:
NN件件/小时小时;装卸时间:
装卸时间:
小于小于1010秒秒;机构系统应装入机体内,机床外形尺寸已知。
机构系统应装入机体内,机床外形尺寸已知。
参参数数机床生产率机床生产率(件(件/小时)小时)工件长度工件长度SS(mm)(mm)行程速行程速比系数比系数KK刀具匀速进给刀具匀速进给速度速度(mm/s)(mm/s)数数据据22、已知条件:
、已知条件:
二、设计题目二、设计题目S快进快进工进工进55刀具刀具快退快退切出量切出量提前量提前量定位销位置与方向定位销位置与方向方案一:
方案一:
圆柱凸轮制造成本高;行程大时,圆柱凸轮制造成本高;行程大时,运动灵活性较差;运动灵活性较差;力的作用点相对导轨产生有害力矩;锁合好。
力的作用点相对导轨产生有害力矩;锁合好。
三、方案构思三、方案构思方案二:
方案二:
凸轮直接驱动升程大,凸轮直接驱动升程大,;凸轮机构外露,影响外观。
;凸轮机构外露,影响外观。
但易更换,易改装及变换尺寸。
但易更换,易改装及变换尺寸。
三、方案构思三、方案构思三、方案构思三、方案构思方案三:
方案三:
放大行程,力减小,长摆杆刚度差;摆杆端部水平分速放大行程,力减小,长摆杆刚度差;摆杆端部水平分速度不是匀速;摆动变移动,不易设计计算。
度不是匀速;摆动变移动,不易设计计算。
方案四:
方案四:
凸轮凸轮-推杆推杆-摆杆(放大行程)摆杆(放大行程)-滑块;滑块;三、方案构思三、方案构思注意凸轮锁合方式注意凸轮锁合方式方案五:
方案五:
凸轮凸轮-推杆齿条推杆齿条-双联齿轮(放大行程)双联齿轮(放大行程)-齿条齿条(移动移动转动转动移动);移动);三、方案构思三、方案构思其它方案:
其它方案:
(1)液压、气动机构;)液压、气动机构;
(2)螺杆机构)螺杆机构-步进电机步进电机-程序控制程序控制(3)纯轮系(齿轮齿条)传动)纯轮系(齿轮齿条)传动-双向电机双向电机-电器控制电器控制注意凸轮锁合方式注意凸轮锁合方式1、确定(构思)方案、确定(构思)方案尽可能构思不同的方案,进行分析、比较,选最佳方案。
尽可能构思不同的方案,进行分析、比较,选最佳方案。
四、设计步骤四、设计步骤2、由、由K推程运动角推程运动角(推程时间推程时间),回程运动角(回程时间);,回程运动角(回程时间);K=K=推程运动角推程运动角/回程运动角回程运动角由生产率由生产率主凸轮主凸轮n凸凸(转(转/分)、分)、凸凸(度(度/秒)秒)。
3、选电机转速、选电机转速n电机选择电机选择Y系列,满载转速系列,满载转速2825、1440、960、720r/min;(电机转速低,体积大,价格高)(电机转速低,体积大,价格高)。
由由n-n凸凸总传动比总传动比i总总分配各级传动比分配各级传动比i总总=i1.i2.i3i带带4(带传动的作用:
降速、吸振、防过载、远距离传动等作用);(带传动的作用:
降速、吸振、防过载、远距离传动等作用);i齿轮齿轮5(可用(可用周转轮系周转轮系或或蜗杆蜗轮蜗杆蜗轮获得大传动比)。
获得大传动比)。
44、运动循环图、运动循环图四、设计步骤四、设计步骤(刀具在工件内及转位时不能插、拔定位销)(刀具在工件内及转位时不能插、拔定位销)作用:
作用:
11)保证执行构件的动作协调配合;)保证执行构件的动作协调配合;22)最大限度地缩短机器的运动循环周期,提高生产率;)最大限度地缩短机器的运动循环周期,提高生产率;33)利于设计、装配、调试。
)利于设计、装配、调试。
时间:
010s40s60s凸轮转角:
凸轮转角:
00?
240240?
?
36036000销在外销在外拔拔销销销在内销在内插插销销销在外销在外定位销定位销转位转位定位定位转位转位工作台工作台刀具在工件外刀具在工件外刀具在工件内刀具在工件内刀具在工件外刀具在工件外主轴箱主轴箱空回行程空回行程工作行程工作行程四、设计步骤四、设计步骤55、机构设计、机构设计11)传动系统设计:
)传动系统设计:
电电动动机机进给凸轮机构进给凸轮机构工作台转位机构工作台转位机构定位机构定位机构22)进刀凸轮廓线的设计:
)进刀凸轮廓线的设计:
运动规律的设计运动规律的设计廓线的设计(图解法、解析法(编程)廓线的设计(图解法、解析法(编程)33)工作台转位机构设计)工作台转位机构设计44)定位机构设计)定位机构设计(带传动、齿轮机构、轮系)(带传动、齿轮机构、轮系)11、图纸、图纸44张:
张:
方案简图(方案简图(1#)1张:
(机构外观、机构布置)和运动循环图;张:
(机构外观、机构布置)和运动循环图;(注意:
布局与干涉注意:
布局与干涉)进给凸轮设计(进给凸轮设计(2#)1张:
(图解法、画张:
(图解法、画s,v,a曲线、凸轮廓线曲线、凸轮廓线(偏置偏置)、)、保留过程线、作图质量要高保留过程线、作图质量要高););工作台转位、定位机构(工作台转位、定位机构(2-3#)2张:
槽轮尺寸图、定位销凸轮。
张:
槽轮尺寸图、定位销凸轮。
22、计算机编程与作图:
、计算机编程与作图:
用解析法计算凸轮参数、作凸轮图和凸轮用解析法计算凸轮参数、作凸轮图和凸轮数据表、源程序、程序流程图;(数据表、源程序、程序流程图;(上机上机66学时免费学时免费,其余自费其余自费)。
)。
五、设计任务(工作量)五、设计任务(工作量)33、设计计算说明书一份、设计计算说明书一份要求:
要求:
题目简介、已知条件、方案构思比较题目简介、已知条件、方案构思比较(要求有三、四个方(要求有三、四个方案的比较分析)案的比较分析)、所选方案的简要设计说明。
、所选方案的简要设计说明。
注意:
不是使用说明书,是技术资料。
注意:
不是使用说明书,是技术资料。
六、运动规律的设计六、运动规律的设计槽轮机的运动系数:
槽轮机的运动系数:
44工位,应取工位,应取44槽单销槽单销t-t-一个运动周期的时间一个运动周期的时间(凸轮转一周的时间凸轮转一周的时间)ttdd-运动的时间运动的时间=1/4=1/4六、运动规律的设计六、运动规律的设计进刀凸轮转速进刀凸轮转速:
生产率生产率:
N件件/小时小时S快进快进快退快退工进工进55h0h00h210075+S工工2400-0/2h0h00h210075+S2400-0/2六、运动规律的设计六、运动规律的设计回程段:
回程段:
避免冲击,避免冲击,用正弦加速度运动规律。
用正弦加速度运动规律。
段:
段:
用正弦加速度运动规律修正用正弦加速度运动规律修正h=10mmS快进快进快退快退工进工进55六、运动规律的设计六、运动规律的设计段:
工作进给段:
工作进给(匀速)(匀速)工进长度:
工进长度:
h=工件长工件长(s)+0.5切出量切出量(5mm)+提前量提前量(5mm)凸轮凸轮:
nr/min60sn36001sn60V工进工进=h/tt0=tn60h0h00h210075+S2400-0/2S快进快进快退快退工进工进55h0h0h210075+S工工2400-0/2六、运动规律的设计六、运动规律的设计段:
快进段:
快进S快进快进快退快退工进工进55va0工工h1用等加减速运动规律修正用等加减速运动规律修正(有柔性冲击有柔性冲击)减速段:
减速段:
边界条件边界条件va0工工h1用五次多项式运动规律修正用五次多项式运动规律修正(没有冲击没有冲击)边界条件边界条件
 升级会员
升级会员 