摄影测量程序汇总后方交会+前方交会+单模型光束法平差.docx
《摄影测量程序汇总后方交会+前方交会+单模型光束法平差.docx》由会员分享,可在线阅读,更多相关《摄影测量程序汇总后方交会+前方交会+单模型光束法平差.docx(34页珍藏版)》请在冰豆网上搜索。
摄影测量程序汇总后方交会+前方交会+单模型光束法平差
程序运行环境为VisualStudio2010.运行前请先将坐标数据放在debug下。
1.单像空间后方交会
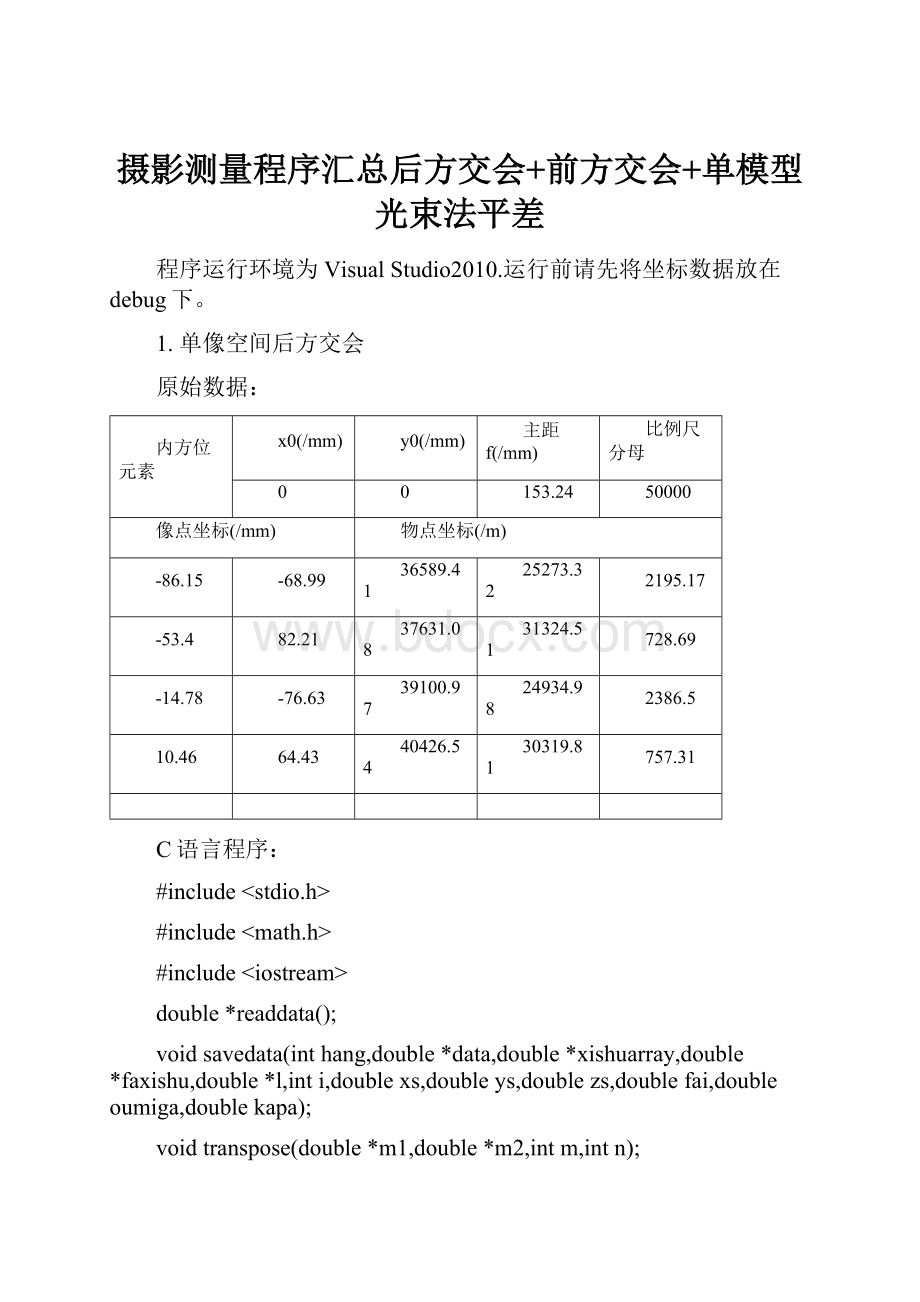
原始数据:
内方位元素
x0(/mm)
y0(/mm)
主距f(/mm)
比例尺分母
0
0
153.24
50000
像点坐标(/mm)
物点坐标(/m)
-86.15
-68.99
36589.41
25273.32
2195.17
-53.4
82.21
37631.08
31324.51
728.69
-14.78
-76.63
39100.97
24934.98
2386.5
10.46
64.43
40426.54
30319.81
757.31
C语言程序:
#include
#include
#include
double*readdata();
voidsavedata(inthang,double*data,double*xishuarray,double*faxishu,double*l,inti,doublexs,doubleys,doublezs,doublefai,doubleoumiga,doublekapa);
voidtranspose(double*m1,double*m2,intm,intn);
voidinverse(double*a,intn);
voidmulti(double*mat1,double*mat2,double*result,inta,intb,intc);
voidinverse(double*a,intn)/*正定矩阵求逆*/
{
inti,j,k;
for(k=0;k{
for(i=0;i{
if(i!
=k)
*(a+i*n+k)=-*(a+i*n+k)/(*(a+k*n+k));
}
*(a+k*n+k)=1/(*(a+k*n+k));
for(i=0;i{
if(i!
=k)
{
for(j=0;j{
if(j!
=k)
*(a+i*n+j)+=*(a+k*n+j)**(a+i*n+k);
}
}
}
for(j=0;j{
if(j!
=k)
*(a+k*n+j)*=*(a+k*n+k);
}
}
}
voidtranspose(double*m1,double*m2,intm,intn)//矩阵转置
{inti,j;
for(i=0;ifor(j=0;jm2[j*m+i]=m1[i*n+j];
return;
}
voidmulti(double*mat1,double*mat2,double*result,inta,intb,intc)
{inti,j,k;
for(i=0;i{for(j=0;j{result[i*c+j]=0;
for(k=0;kresult[i*c+j]+=mat1[i*b+k]*mat2[k*c+j];
}
}
return;
}
double*readdata()
{
FILE*fp;
inti,j;
intnumber;
chardatacatolog[100];
//scanf("%s",datacatolog);
if((fp=fopen("控制点坐标.txt","r"))==NULL)
{
printf("读取数据出错!
\n");
returnfalse;
}
fscanf(fp,"%d",&number);
double*cordata=newdouble[number*5];
for(i=0;i{
for(j=0;j<5;j++)
{
fscanf(fp,"%lf",cordata+i*5+j);
}
}
printf("控制点坐标数据读取成功!
\n");
returncordata;
}
voidsavedata(inthang,double*data,double*xishuarray,double*faxishu,double*l,inti,doublexs,doubleys,doublezs,doublefai,doubleoumiga,doublekapa)
{
FILE*fp;
char*file1="结算数据.txt";
fp=fopen(file1,"w");
fprintf(fp,"---------原始坐标数据为--------:
\n");
for(inti=0;i{
for(intj=0;j<5;j++)
{
fprintf(fp,"%7.4lf",data[i*5+j]);
}
fprintf(fp,"\n");
}
fprintf(fp,"--------------------------------\n");
fprintf(fp,"---------误差方程系数阵为:
--------:
\n");
for(inti=0;i{
for(intj=0;j<6;j++)
{
fprintf(fp,"%7.4lf",xishuarray[i*5+j]);
}
fprintf(fp,"\n");
}
fprintf(fp,"--------------------------------\n");
fprintf(fp,"---------法方程系数阵为:
--------:
\n");
for(inti=0;i<6;i++)
{
for(intj=0;j<6;j++)
{
fprintf(fp,"%7.5lf",faxishu[i*5+j]);
}
fprintf(fp,"\n");
}
fprintf(fp,"--------------------------------\n");
fprintf(fp,"---------误差方程常数项为:
--------:
\n");
for(inti=0;i{
fprintf(fp,"%lf",l[i]);
fprintf(fp,"\n");
}
fprintf(fp,"--------------------------------\n");
fprintf(fp,"---------迭代次数为:
--------:
\n");
fprintf(fp,"%d\n",i);
fprintf(fp,"--------------------------------\n");
fprintf(fp,"-----------外方位元素为:
---------\n");
fprintf(fp,"Xs=%lf,Ys=%lf,Zs=%lf\n",xs,ys,zs);
fprintf(fp,"fai=%lf,oumiga=%lf,kapa=%lf\n",fai,oumiga,kapa);
fprintf(fp,"--------------------------------\n");
fclose(fp);
return;
}
voidmain()
{
inti,j;
intii,jj;
intdiedainumber=0;
doublex0=0.0,y0=0.0,f=0.0;
doublem=50000;//估算比例尺
doublefai=0,oumiga=0,kapa=0,Xs=0,Ys=0,Zs=0;
doubleR[3][3]={0.0};
doubleX=0.0,Y=0.0,Z=0.0,L[8][1]={0.0},A[8][6]={0.0};
doublecorrect[6][1]={0.0},AT[6][8]={0.0},ATA[6][6]={0.0},ATL[6][1]={0.0};
introw;//row用于存放坐标行数
double*controlpoint;
controlpoint=readdata();
row=sizeof(controlpoint);
for(i=0;i{
for(j=0;j<5;j++)
{
printf("%3.3lf",controlpoint[i*5+j]);
}
printf("\n");
}
/*----------内方位元素----------*/
printf("请输入像片的内方位元素(mm):
\n");
printf("x0=");
x0/=1000.0;
scanf("%lf",&x0);//double类型数据要用%lf
printf("y0=");
y0/=1000.0;
scanf("%lf",&y0);
printf("f=");
scanf("%lf",&f);
f=f/1000.0;
/*------------------------------*/
//-------确定未知数初始值------
for(inti=0;i{
Xs=Xs+controlpoint[i*5+2];
Ys=Ys+controlpoint[i*5+3];
Zs=Zs+controlpoint[i*5+4];
}
Xs/=row;
Ys/=row;
Zs=Zs/row+m*f;
//-----------------------------
do
{
diedainumber++;
//---------组成旋转矩阵--------
R[0][0]=cos(fai)*cos(kapa)-sin(fai)*sin(oumiga)*sin(kapa);
R[0][1]=-cos(fai)*sin(kapa)-sin(fai)*sin(oumiga)*cos(kapa);
R[0][2]=-sin(fai)*cos(oumiga);
R[1][0]=cos(oumiga)*sin(kapa);
R[1][1]=cos(oumiga)*cos(kapa);
R[1][2]=-sin(oumiga);
R[2][0]=sin(fai)*cos(kapa)+cos(fai)*sin(oumiga)*sin(kapa);
R[2][1]=-sin(fai)*sin(kapa)+cos(fai)*sin(oumiga)*cos(kapa);
R[2][2]=cos(fai)*cos(oumiga);
//-----------------------------
//计算系数阵和常数项
for(inti=0,k=0,j=0;i<=3;i++,k++,j++)
{
X=R[0][0]*(controlpoint[i*5+2]-Xs)+R[1][0]*(controlpoint[i*5+3]-Ys)+R[2][0]*(controlpoint[i*5+4]-Zs);
Y=R[0][1]*(controlpoint[i*5+2]-Xs)+R[1][1]*(controlpoint[i*5+3]-Ys)+R[2][1]*(controlpoint[i*5+4]-Zs);
Z=R[0][2]*(controlpoint[i*5+2]-Xs)+R[1][2]*(controlpoint[i*5+3]-Ys)+R[2][2]*(controlpoint[i*5+4]-Zs);
L[j][0]=controlpoint[i*5+0]-(x0-f*X/Z);
L[j+1][0]=controlpoint[i*5+1]-(y0-f*Y/Z);
j++;
A[k][0]=(R[0][0]*f+R[0][2]*(controlpoint[i*5+0]-x0))/Z;
A[k][1]=(R[1][0]*f+R[1][2]*(controlpoint[i*5+0]-x0))/Z;
A[k][2]=(R[2][0]*f+R[2][2]*(controlpoint[i*5+0]-x0))/Z;
A[k][3]=(controlpoint[i*5+1]-y0)*sin(oumiga)-((controlpoint[i*5+0]-x0)*((controlpoint[i*5+0]-x0)*cos(kapa)-(controlpoint[i*5+1]-y0)*sin(kapa))/f+f*cos(kapa))*cos(oumiga);
A[k][4]=-f*sin(kapa)-(controlpoint[i*5+0]-x0)*((controlpoint[i*5+0]-x0)*sin(kapa)+(controlpoint[i*5+1]-y0)*cos(kapa))/f;
A[k][5]=controlpoint[i*5+1]-y0;
A[k+1][0]=(R[0][1]*f+R[0][2]*(controlpoint[i*5+1]-y0))/Z;
A[k+1][1]=(R[1][1]*f+R[1][2]*(controlpoint[i*5+1]-y0))/Z;
A[k+1][2]=(R[2][1]*f+R[2][2]*(controlpoint[i*5+1]-y0))/Z;
A[k+1][3]=-(controlpoint[i*5+0]-x0)*sin(oumiga)-((controlpoint[i*5+1]-y0)*((controlpoint[i*5+0]-x0)*cos(kapa)-(controlpoint[i*5+1]-y0)*sin(kapa))/f-f*sin(kapa))*cos(oumiga);
A[k+1][4]=-f*cos(kapa)-(controlpoint[i*5+1]-y0)*((controlpoint[i*5+0]-x0)*sin(kapa)+(controlpoint[i*5+1]-y0)*cos(kapa))/f;
A[k+1][5]=-(controlpoint[i*5+0]-x0);
k++;
}
transpose(A[0],AT[0],8,6);
multi(AT[0],A[0],ATA[0],6,8,6);
inverse(ATA[0],6);
multi(AT[0],L[0],ATL[0],6,8,1);
multi(ATA[0],ATL[0],correct[0],6,6,1);
Xs=Xs+correct[0][0];
Ys=Ys+correct[1][0];
Zs=Zs+correct[2][0];
fai=fai+correct[3][0];
oumiga=oumiga+correct[4][0];
kapa=kapa+correct[5][0];
}while(correct[3][0]>=6.0/206265.0||correct[4][0]>=6.0/206265.0||correct[5][0]>=6.0/206265.0);
printf("迭代次数为:
%d\n",diedainumber);
printf("---------误差方程系数为:
--------\n");
for(i=0;i<8;i++)
{
for(j=0;j<6;j++)
{
printf("%4.4lf",A[i][j]);
}
printf("\n");
}
printf("--------------------------------\n");
printf("求解得到的外方位元素为:
\n");
printf("Xs=%lf\n",Xs);
printf("Ys=%lf\n",Ys);
printf("Zs=%lf\n",Zs);
printf("fai=%lf\n",fai);
printf("oumiga=%lf\n",oumiga);
printf("kapa=%lf\n",kapa);
savedata(row,controlpoint,A[0],ATA[0],L[0],diedainumber,Xs,Ys,Zs,fai,oumiga,kapa);
printf("-----------------解算结束!
--------------\n");
system("pause");
}
解算结果:
2.后方交会-前方交会求解地面点坐标
已知左右像片外方位元素,给出像点坐标:
左像点坐标:
右像点坐标:
x(/m)
y(/m)
x(/m)
y(/m)
0.0053
0.0069
0.00482
0.0027
0.00556
0.00229
0.00521
-0.00191
0.00815
0.00499
0.00773
0.00089
-0.00247
0.00156
-0.00279
-0.00292
C语言代码:
#include
#include
#include
double*readdata();
voidsavedata(inthang,double*data);
double*readdata()
{
FILE*fp;
inti,j,k;
intnumber;
chardatacatolog[100];
charleftdata[300];
//scanf("%s",datacatolog);
if((fp=fopen("像点坐标数据.txt","r"))==NULL)
{
printf("读取数据出错!
\n");
system("pause");
exit(0);
}
fscanf(fp,"%d",&number);
double*c=newdouble[number*4];
for(k=0;k<2;k++)
{
fread(&leftdata,14,1,fp);
for(i=0;i{
for(j=0;j<2;j++)
{
fscanf(fp,"%lf",c+k*2+i*4+j);
}
}
}
fclose(fp);
returnc;
}
voidsavedata(inthang,double*data)
{
FILE*fp;
char*file1="地面点坐标数据.txt";
fp=fopen(file1,"w");
fprintf(fp,"---------像点对应地面点坐标为--------:
\n");
fprintf(fp,"\n");
for(inti=0;i{
fprintf(fp,"第%d点:
",i+1);
for(intj=0;j<3;j++)
{
fprintf(fp,"%7.4lf",data[i*3+j]);
}
fprintf(fp,"\n\n");
}
fprintf(fp,"-----------------------------------------");
fclose(fp);
return;
}
voidmain()
{
double*imagepoint;
introw;
inti,j;
imagepoint=readdata();
row=sizeof(imagepoint);
//--------------------------------------------
doublef=24;
f/=1000;
doublefai1=-0.0061,oumiga1=0.0327,kapa1=0.1711,Ys1=397367.171,Xs1=3445820.098,Zs1=1486.212;
doublefai2=0.0063,oumiga2=0.0178,kapa2=0.1489,Ys2=397367.234,Xs2=3445959.266,Zs2=1490.096;
//printf("请输入左像片的外方位元素:
\n");
//printf("Xs1=");
//scanf("%lf",&Xs1);
//printf("Ys1=");
//scanf("%lf",&Ys1);
//printf("Zs1=");
//scanf("%lf",&Zs1);
//printf("fai1=");
//scanf("%lf",&fai1);
//printf("oumiga1=");
//scanf("%lf",&oumiga1);
//printf("kapa1=");
//scanf("%lf",&kapa1);
//printf("请输入右像片的外方位元素:
\n");
//printf("Xs2=");
//scanf("%lf",&Xs2);
//printf("Ys2=");
//scanf("%lf",&Ys2);
//printf("Zs2=");
//scanf("%lf",&Zs2);
//printf("fai2=");
//scanf("%lf",&fai2);
//printf("oumiga2=");
//scanf("%lf",&oumiga2);
//printf("kapa2=");
//scanf("%lf",&kapa2);
doubleBx=Xs2-Xs1,By=Ys2-Ys1,Bz=Zs2-Zs1;
doubleN1=0,N2=0;
doubleX1=0,Y1=0,Z1=0,X2=0,Y2=0,Z2=0;
doubleR1[3][3]={0.0};
doubleR2[3][3]={0.0};
doubleGEOdata[4][3]={0.0};
for(i=0;i{
//-
 升级会员
升级会员 