距离和位移检测实验word精品文档12页.docx
《距离和位移检测实验word精品文档12页.docx》由会员分享,可在线阅读,更多相关《距离和位移检测实验word精品文档12页.docx(22页珍藏版)》请在冰豆网上搜索。
距离和位移检测实验word精品文档12页
实验一距离位移传感器的测量
要练说,先练胆。
说话胆小是幼儿语言发展的障碍。
不少幼儿当众说话时显得胆怯:
有的结巴重复,面红耳赤;有的声音极低,自讲自听;有的低头不语,扯衣服,扭身子。
总之,说话时外部表现不自然。
我抓住练胆这个关键,面向全体,偏向差生。
一是和幼儿建立和谐的语言交流关系。
每当和幼儿讲话时,我总是笑脸相迎,声音亲切,动作亲昵,消除幼儿畏惧心理,让他能主动的、无拘无束地和我交谈。
二是注重培养幼儿敢于当众说话的习惯。
或在课堂教学中,改变过去老师讲学生听的传统的教学模式,取消了先举手后发言的约束,多采取自由讨论和谈话的形式,给每个幼儿较多的当众说话的机会,培养幼儿爱说话敢说话的兴趣,对一些说话有困难的幼儿,我总是认真地耐心地听,热情地帮助和鼓励他把话说完、说好,增强其说话的勇气和把话说好的信心。
三是要提明确的说话要求,在说话训练中不断提高,我要求每个幼儿在说话时要仪态大方,口齿清楚,声音响亮,学会用眼神。
对说得好的幼儿,即使是某一方面,我都抓住教育,提出表扬,并要其他幼儿模仿。
长期坚持,不断训练,幼儿说话胆量也在不断提高。
一、实验目的:
观察内容的选择,我本着先静后动,由近及远的原则,有目的、有计划的先安排与幼儿生活接近的,能理解的观察内容。
随机观察也是不可少的,是相当有趣的,如蜻蜓、蚯蚓、毛毛虫等,孩子一边观察,一边提问,兴趣很浓。
我提供的观察对象,注意形象逼真,色彩鲜明,大小适中,引导幼儿多角度多层面地进行观察,保证每个幼儿看得到,看得清。
看得清才能说得正确。
在观察过程中指导。
我注意帮助幼儿学习正确的观察方法,即按顺序观察和抓住事物的不同特征重点观察,观察与说话相结合,在观察中积累词汇,理解词汇,如一次我抓住时机,引导幼儿观察雷雨,雷雨前天空急剧变化,乌云密布,我问幼儿乌云是什么样子的,有的孩子说:
乌云像大海的波浪。
有的孩子说“乌云跑得飞快。
”我加以肯定说“这是乌云滚滚。
”当幼儿看到闪电时,我告诉他“这叫电光闪闪。
”接着幼儿听到雷声惊叫起来,我抓住时机说:
“这就是雷声隆隆。
”一会儿下起了大雨,我问:
“雨下得怎样?
”幼儿说大极了,我就舀一盆水往下一倒,作比较观察,让幼儿掌握“倾盆大雨”这个词。
雨后,我又带幼儿观察晴朗的天空,朗诵自编的一首儿歌:
“蓝天高,白云飘,鸟儿飞,树儿摇,太阳公公咪咪笑。
”这样抓住特征见景生情,幼儿不仅印象深刻,对雷雨前后气象变化的词语学得快,记得牢,而且会应用。
我还在观察的基础上,引导幼儿联想,让他们与以往学的词语、生活经验联系起来,在发展想象力中发展语言。
如啄木鸟的嘴是长长的,尖尖的,硬硬的,像医生用的手术刀―样,给大树开刀治病。
通过联想,幼儿能够生动形象地描述观察对象。
了解和掌握各种距离位移传感器的工作原理和测量方法。
“教书先生”恐怕是市井百姓最为熟悉的一种称呼,从最初的门馆、私塾到晚清的学堂,“教书先生”那一行当怎么说也算是让国人景仰甚或敬畏的一种社会职业。
只是更早的“先生”概念并非源于教书,最初出现的“先生”一词也并非有传授知识那般的含义。
《孟子》中的“先生何为出此言也?
”;《论语》中的“有酒食,先生馔”;《国策》中的“先生坐,何至于此?
”等等,均指“先生”为父兄或有学问、有德行的长辈。
其实《国策》中本身就有“先生长者,有德之称”的说法。
可见“先生”之原意非真正的“教师”之意,倒是与当今“先生”的称呼更接近。
看来,“先生”之本源含义在于礼貌和尊称,并非具学问者的专称。
称“老师”为“先生”的记载,首见于《礼记?
曲礼》,有“从于先生,不越礼而与人言”,其中之“先生”意为“年长、资深之传授知识者”,与教师、老师之意基本一致。
二、实验仪器:
德普施距离与位移传感器实验台DRJLWY
德普施基础实验平台DRMY-ME-C
德普施数据采集卡DRDAQ-USB
SINO光栅尺数显表SINO-SDS3
DRVI虚拟仪器实验平台DRVI-2.3
三、实验原理:
在德普施距离和位移传感器上集成安装了各种传感器,包括有:
直线位移滑变电阻式传感器,超声波测距传感器,红外光电式测距传感器。
实验台上还安装了一个数字显示光栅尺作为位移传感器的定标工具标定。
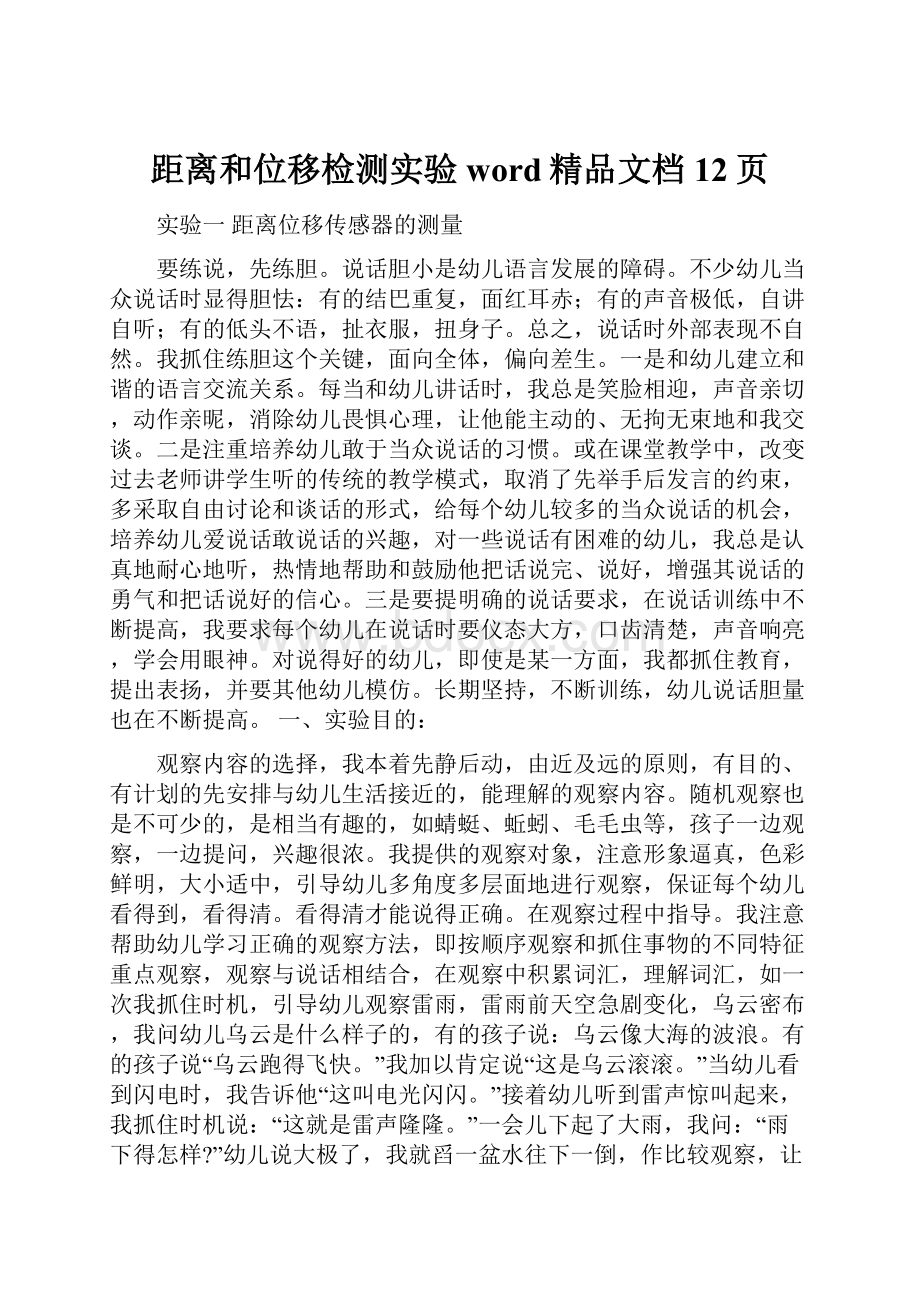
1、直线位移滑变电阻式传感器的工作原理
一、此种传感器基本结构分为三层:
1.导电层(涂覆银膜用于导电)
2.空气层(通过一定高度的分隔,使导电层与电阻层在自然状态下没有接触)
3.导电塑料电阻层(涂覆导电塑料电阻的基层)
二、作用实现
当导电层受到外力向下压,会与最下层的导电塑料层发生接触,从而输出信号。
图1-1直线位移传感器的工作原理
直线位移滑变电阻式传感器(又称电子尺,电阻尺)实际上就是一个滑变电阻器。
随着压力滑块的运动,输出的电阻也随之变化,电阻的阻值与滑块距零点的位置成正比。
传感器的原理图如下图1-2所示:
利用滑变电阻器的滑块引出抽头对输入电压进行分,假设出电压为0至+5V之间的模拟电压信号,传感器的输出特性为Y=KX,如上图1-3所示。
其中Y为传感器的输出,X为滑变电阻器中间抽头距零点的距离。
2、超声波测距传感器的工作原理
声波是一种能在气体、液体和固体中传播的机械波。
根据振动频率的不同,可分为次声波、声波、超声波和微波等。
1)次声波:
振动频率低于l6Hz的机械波。
2)声波:
振动频率在16—20KHz之间的机械波,在这个频率范围内能为人耳所闻。
3)超声波:
高于20KHz的机械波。
超声波与一般声波比较,它的振动频率高,而且波长短,因而具有束射特性,方向性强,可以定向传播,其能量远远大于振幅相同的一般声波,并且具有很高的穿透能力。
例如,在钢材中甚至可穿透10米以上。
超声波在均匀介质中按直线方向传播,但到达界面或者遇到另一种介质时,也像光波一样产生反射和折射,并且服从几何光学的反射、折射定律。
超声波在反射、折射过程中,其能量及波型都将发生变化。
超声波在界面上的反射能量与透射能量的变化。
取决于两种介质声阻抗特性。
和其他声波一样,两介质的声阻抗特性差愈大,则反射波的强度愈大。
例如,钢与空气的声阻抗特性相差10万倍,故超声波几乎不通过空气与钢的介面,全部反射。
超声波在介质中传播时,随着传播距离的增加,能量逐渐衰减,能量的衰减决定于波的扩散、散射(或漫射)及吸收。
扩散衰减,是超声波随着传播距离的增加,在单位面积内声能的减弱;散射衰减,是由于介质不均匀性产生的能量损失;超声波被介质吸收后,将声能直接转换为热能,这是由于介质的导热性、粘滞性及弹性造成的。
图1-4超声波传感器结构示意图
以超声波为检测手段,包括有发射超声波和接收超声波,并将接收的超声波转换成电量输出的装置称为超声波传感器。
习惯上称为超声波换能器或超声波探头。
常用的超声波传感器有两种,即压电式超声波传感器(或称压电式超声波探头)和磁致式超声波传感器。
本实验采用的是压电式超声波传感器,主要由超声波发射器(或称发射探头)和超声波接收器(或称接收探头)两部分组成,它们都是利用压电材料(如石英、压电陶瓷等)的压电效应进行工作的。
利用逆压电效应将高频电振动转换成高频机械振动,产生超声波,以此作为超声波的发射器。
而利用正压电效应将接收的超声振动波转换成电信号,以此作为超声波的接收器。
超声波传感器的测距原理:
超声波发射器向某一方向发射超声波,在发射时刻的同时开始计时,超声波在空气中传播,途中碰到障碍物就立即返回来,超声波接收器收到反射波就立即停止计时。
设超声波在空气中的传播速度为340m/s,根据计时器记录的时间t,就可以计算出发射点距障碍物的距离S,即:
S=340t/2
实验所使用的DRMNCS-B型超声波传感器的发射波频率是40KHz,传感器实际上是由单片机来控制工作的:
发射探头发射一组5个超声波脉冲后,输出电平由高电平转为低电平;等到接收探头接收到足够强度的反射超声波信号时,输出信号由低电平转为高电平。
所以在实验的过程中,同学们可以观察到随着反射板到探头的距离变化,传感器输出波形的“脉冲”宽度也会对应的发生变化,测试距离越远,脉冲的宽度越宽。
因此,计算出脉冲的宽度就可以计算出反射板到探头的距离。
发射的两组脉冲间隔时间约为18ms,对应的测试距离为3.069m。
所以,该型号的超声波传感器的最远测试距离是3米。
为了消除发射电路强电磁脉冲对接收电路的影响,在发射电路发射脉冲后,接收电路需延时大约1ms,才能正常接收信号。
在设计中为保险起见,这个时间被设计成1ms,对应的最短测试距离约为0.17m,所以DRMNCS-B型超声波传感器的测试范围在0.17~2.5米是有技术保证的。
另外,空气中的声音传播速度不是一个固定的值,通常我们所认为的340m/s是一个大概的数据,在不同的温度下这个数据会有一些变化。
其传播速度的修正公式为S=331.4×(1+t/273)^0.5,t为空气温度。
作为常温下的测试,可以就认为声速为346m/s(按25℃计算)。
超声波传感器的工作原理图如下图1-5所示。
接收
输出
发射
如上图所示,使用超声波传感器进行测量,需要测量声波返回的时间,然后根据声速再空气中的传播公式,求出探测物体与超声波传感器之间的距离。
3、红外光电式测距传感器的工作原理
红外光电式测距传感器是一种利用”三角原理”来进行测量距离的传感器。
它的探头由一个红外发光二极管和一个PSD(PositionSensingDevice)所组成。
如下图1-6所示。
图1-6
传感器使用”三角原理”来进行距离的探测。
在红外发光二极管旁的PSD实际上是一个线性的CCD阵列,距离红外发光二极管3/4英寸(19mm)。
利用CCD阵列接收到障碍物反射回来的红外线光来进行距离的测量。
图1-7
如上图1-7所示,随着障碍物距离的变化,LED发射的红外线光被障碍物反射回到PSD的角度不同,根据PSD传感器探测到的红外线角度,就可以计算出障碍物到距传感器之间的距离。
PSD传感器判断入射角是使用CCD阵列来实现的。
在PSD中排有一线性CCD阵列,障碍物的距离变化造成PSD传感器入射角度的不同,根据PSD中CCD阵列中接收到红外线光的CCD的位置,就可以计算出入射角。
由于受到PSD传感器中CCD大小和LED距PSD之间的距离限制,红外光电传感器的探测距离受到限制,DRMNGD-A传感器的探测距离为10cm—80cm。
此传感器输出为一模拟量,传感器输出和距离不是线性关系。
四、实验步骤及内容
1、连接距离与位移传感器实验台电源线,传感器和实验模块连线。
超声波传感器---模块1通道
红外光电距离传感器---模块2通道
直线位移传感器---模块3通道
步进电机---直线位移控制盒电机1
限位开关1---直线位移控制盒AD1
线位开关2---直线位移控制盒AD2
直线位移控制盒---连接PC机COM1串口,以及交流220V电源。
连接光栅尺与数显表---光栅尺的串口输出接数显表背面输入,光栅尺的交流220V电源
打开实验台供电电源开关,电源指示灯亮表示供电正常。
打开实验台上直流电源开关,电源指示灯亮表示供电正常。
打开实验台上数据采集卡电源按钮(红色),电源指示灯亮表示供电正常。
打开光栅尺数显表开关,数显表上的LED灯亮表示供电正常。
打开直线位移控制盒的开关,电源开关和状态指示灯亮表示工作正常。
2、服务器端DRVI注册
启动服务器,运行DRVI程序,点击DRVI快捷工具条上的“联机注册”图标,选择其中的“DRVI采集仪主卡检测(USB)”进行服务器和数据采集仪之间的注册。
联机注册成功后,从DRVI工具栏和快捷工具条中启动内置的Web服务器”,开始监听8500端口。
3、客户端DRVI注册
打开客户端计算机,启动计算机上的DRVI程序,然后点击DRVI快捷工具条上的“联机注册”图标,选择其中的“DRVI局域网服务器检测”,在弹出的对话框中输入服务器IP地址(例如:
192.168.0.1),点击“发送”按钮,进行客户端和服务器之间的认证,认证完毕即可正常运行客户端所有功能。
4、启动实验脚本
选择DRVI菜单栏系统---读IC资源文件,在弹出的文件选择对话框中选择“距离位移传感器的工作原理”实验脚本,服务器端选择打开带服务器后缀的脚本,客户端选择打开带客户端后缀的脚本。
5、实验内容
1、服务器端
打开后的服务器端的实验脚本如下图1-8所示。
图1-8
点击“启/停”按钮启动实验脚本开始运行。
点击“前进”按钮使反射板向远离传感器运动,点击“后退”按钮使反射板靠近传感器运动。
点击“停止”按钮使反射板停止运动。
点击“加速”按钮时反射板运动速度加快,点击“减速”按钮时反射板运动速度减慢。
2、客户端
打开后的客户端的实验脚本如下图1-9所示。
图1-9
3、观察反射板在不同位置时,超声波传感器、红外距离传感器,直线位移传感器的输出波形。
4、根据超声波传感器超声波声波返回的时间,计算不同位置超声波传感器的测量距离值。
移动反射板,取5个点,记录出光栅尺的输出值和红外距离传感器以及直线位移传感器、超声波传感器的输出值并绘制出其输入输出曲线。
五、实验报告要求
1、简述各种位移传感器的原理。
2、整理实验数据并绘制各种传感器的输出特性。
六、思考题
根据实验的结果,比较各种传感器特性与区别,对应用场合有何影响?
实验二不同位移传感器的特性测量标定实验
一、实验目的:
了解和掌握各种距离位移传感器的测量特性。
二、实验仪器:
德普施距离与位移传感器实验台DRJLWY
德普施基础实验平台DRMY-ME-C
德普施数据采集卡DRDAQ-USB
SINO光栅尺数显表SINO-SDS3
DRVI虚拟仪器实验平台DRVI-2.3
三、实验原理:
在德普施距离和位移传感器上集成安装了各种传感器,包括有:
直线位移滑变电阻式传感器,超声波测距传感器,红外光电式测距传感器。
实验台上还安装了一个数字显示光栅尺作为位移传感器的定标工具标定。
一、超声波传感器的特性
1、超声波的指向性
超声波传感器使用超声波作为距离的测量手段。
超声波是一种振动频率高于声波的机械波,在DRMNCS-B传感器中是利用逆压电效应由压电晶体振动所产生的40KHZ的超声波。
超声波的振动频率高,波长小,指向性好。
DRMNCS-B使用双探头,一个探头为超声波发送头,一个探头为超声波接收探头。
因此在使用此超声波传感器的时候,要超声波传感器探头正对着被探测物体成一直线,并且被探测物体表面要比较平面,这样它的探测结果才能准确。
如果被探测物体与超声波传感器的探头不在一条直线上,那么探测的结果就不准确或探测不到。
图2-1被探测物体非平面图2-2被探测物体偏离探头
2、超声波的工作范围
由于超声波测距传感器的工作原理是发射一组超声波,然后接收电路等待18ms再发送一组超声波,因此在这个时间段内返回来的超声波才有效,这个等待的时间决定了超声波传感器能够测量的最大范围是多少。
由于超声波传感器发射和接收之间电路进行转换需要延时1ms,因此在这段时间内反射回来的超声波不能被接收电路所接收,因此这段时间决定了超声波能够探测的最短距离。
以超声波在空气中的传播速度为340m/s计算,就不难算出超声波的探测范围为:
最大检测距离:
340*0.018/2=3.06m
最小检测距离:
340*0.001/2=0.17m
3、超声波传感器的频率响应
由于超声波传感器每隔18ms发射一组超声波,因此超声波传感器的输出频率也就固定了:
1/0.018=55.56HZ。
这也就决定了超声波传感器不能检测高频率的距离变化,如果障碍物距离移动的频率高于这个频率,超声波传感器就不能反映此频率的位移。
二、红外测距传感器的特性
1、红外测距传感器的输入输出特型
红外测距传感器的测量范围为12cm至80cm。
此传感器的输入输出曲线在工作范围内是非线性的,特性曲线如下图2-3所示:
图2-3红外测距传感器特型曲线
可以看到红外测距传感器的输出在工作范围内是一条非线性的曲线,随着探测距离的增加,传感器的输出电压逐渐降低。
因此在红外测距传感器需要进行线性化定标之后,才能进行实际的距离测量。
2、红外测距传感器的工作频率
此红外测距传感器工作再25HZ频率下,也就是说传感器每40ms测量一次。
传感器的工作情况如下图2-4所示,每38.3ms传感器进行一次测量然后将结果输出。
传感器在进行本次测量的同时传感器当前的输出为上次测量的结果。
图2-4红外测距传感器的工作频率
三、电阻式位移传感器的特性
电阻式位移传感器的由于使用导电塑料作为滑变电阻器,忽略负载效应,电阻传感器的输出为线性输出,传感器的特性曲线为一直线。
此传感器的分辨率理论上是无穷小,灵敏度只受到采集系统的分辨率的限制。
传感器的原理图如下图1-2所示:
利用滑变电阻器的滑块引出抽头对输入电压进行分,假设出电压为0至+5V之间的模拟电压信号,传感器的输出特性为Y=KX,如上图1-3所示。
其中Y为传感器的输出,X为滑变电阻器中间抽头距零点的距离。
四、实验步骤及内容
1、连接距离与位移传感器实验台电源线,传感器和实验模块连线。
超声波传感器---模块1通道
红外光电距离传感器---模块2通道
直线位移传感器---模块3通道
步进电机---直线位移控制盒电机1
限位开关1---直线位移控制盒AD1
线位开关2---直线位移控制盒AD2
直线位移控制盒---连接PC机COM1串口,以及交流220V电源。
连接光栅尺与数显表---光栅尺的串口输出接数显表背面输入,光栅尺的交流220V电源
打开实验台供电电源开关,电源指示灯亮表示供电正常。
打开实验台上直流电源开关,电源指示灯亮表示供电正常。
打开实验台上数据采集卡电源按钮(红色),电源指示灯亮表示供电正常。
打开光栅尺数显表开关,数显表上的LED灯亮表示供电正常。
打开直线位移控制盒的开关,电源开关和状态指示灯亮表示工作正常。
2、服务器端DRVI注册
启动服务器,运行DRVI程序,点击DRVI快捷工具条上的“联机注册”图标,选择其中的“DRVI采集仪主卡检测(USB)”进行服务器和数据采集仪之间的注册。
联机注册成功后,从DRVI工具栏和快捷工具条中启动内置的Web服务器”,开始监听8500端口。
3、客户端DRVI注册
打开客户端计算机,启动计算机上的DRVI程序,然后点击DRVI快捷工具条上的“联机注册”图标,选择其中的“DRVI局域网服务器检测”,在弹出的对话框中输入服务器IP地址(例如:
192.168.0.1),点击“发送”按钮,进行客户端和服务器之间的认证,认证完毕即可正常运行客户端所有功能。
4、启动实验脚本
选择DRVI菜单栏系统---读IC资源文件,在弹出的文件选择对话框中选择“距离位移传感器的工作原理”实验脚本,服务器端选择打开带服务器后缀的脚本,客户端选择打开带客户端后缀的脚本。
5、启动实验脚本
服务器端
打开后的服务器端的实验脚本如下图所示。
图2-7
点击“启/停”按钮启动实验脚本开始运行。
点击“前进”按钮使反射板向远离传感器运动,点击“后退”按钮使反射板靠近传感器运动。
点击“停止”按钮使反射板停止运动。
点击“加速”按钮时反射板运动速度加快,点击“减速”按钮时反射板运动速度减慢。
5、客户端
打开后的客户端的实验脚本如下图2-8所示。
图2-8
6、实验内容
1、工作台回零
点击“启/停”按钮开始运行。
点击后退按钮使工作台运行到传感器一侧极限位置。
按SINO-SDS3数显表上的CLS按钮使数显表的输出为清零。
2、观察距离位移传感器的输出特性曲线
点击“前进”按钮使工作台运动到另一侧的极限位置。
观察传感器的输出波形(上面一个波形显示窗)和传感器输出随距离变化的曲线(下面一个波形显示窗)。
2、传感器的位置的标定
将工作台停在位置1,分别记录下数显表的距离输出(单位为毫米)和红外距离传感器和直线位移传感器的电压平均值、超声波探测距离值。
移动工作台到下一个位置,再记录下数显表的距离输出(单位为毫米)和红外距离传感器和直线位移传感器的电压平均值、超声波探测距离值。
重复以上步骤,分别取得20个位置的红外距离传感器和直线位移传感器的标定点,以及超声波探测距离值。
3、利用DRVI的传感器标定工具进行传感器定标
打开DRVI的传感器定标曲线拟合工具。
如图下所示。
图2-9
打开的传感器定标拟合工具如下图所示。
定标数据
图2-10
定标曲线采用线性多项式进行拟合,定标曲线阶次就是拟合时采用的线性方程阶次。
Y=A0+A1*X+A2*X^2+A3*X^3+.......
在定标数据窗口中输入20个点的输入输出数据。
数据格式为A,B(A为输入,在这里为光栅尺的读数,B为输出,为记录的对应传感器的电压平均值)。
然后选择相应的拟合曲线阶次。
对于直线位移传感器,他的数据点分布在一条直线上,可以用1阶拟合,但是对于红外距离传感器,需要使用高阶次的阶次。
选择好曲线阶次之后,点击拟合,在左侧窗口中会显示传感器的拟合曲线(蓝色),在曲线阶次的下面输入框内会自动计算出拟合曲线各阶次的系数。
如果拟合的曲线与数据点重合度不高,说明阶次选择较低。
如果计算的系数最后几项为零,说明曲线阶次选择较高。
计算的曲线各阶次的系数从零阶开始从上到下依次排列。
分别记录下红外距离传感器和直线位移传感器的曲线阶次和对应的系数。
4、传感器定标测量
图2-11
在标定芯片上点鼠标右键,弹出芯片属性,然后在属性中填入对应传感器的标定拟合多项式的阶次和各系数项,如下图2-12所示:
图2-12
点击设定按钮设定数据有效。
移动工作台,比较红外距离传感器、直线位移传感器的输出(实际测量值)和数显表的显示值,观察定标数据是否准确。
五、实验报告要求
1、记录下个传感器的输入输出值,在坐标纸上绘制出传感器的特性曲线。
2、根据绘制的超声波传感器的特性曲线,说明小于探测距离内的曲线原因。
3、根据特性曲线和定标之后的测量结果,分析红外传感器和直线位移传感器的不同,他们可以各自应用在什么场合?
实验三直线运动模块的运动控制实验
一、实验目的:
了解和掌握基本一维运动控制模块的组成及控制方式。
二、实验仪器:
德普施距离与位移传感器实验台DRJLWY
德普施基础实验平台DRMY-ME-C
德普施数据采集卡DRDAQ-USB
SINO光栅尺数显表SINO-SDS3
DRVI虚拟仪器实验平台DRVI-2.3
三、实验原理:
基本运动控制系统组成:
机械运动机构、电机(伺服或者步进)、电机驱动器、控制器以及控制软件所组成。
在德普施距离和位移传感器模块上安装了一个一维运动控制模块。
它由一个滚珠丝杆(直线运动机械运动机构)和一个步进电机和一个运动控制盒(内含运动控制卡与驱动单元)以及各种位移传感器所组成。
步进电动机又称为脉冲电机,是工业过程控制中一种能够快速启动、反转和制动的执行元件。
其功能是将电脉冲转换为相应的角位移或直线位移。
步进电动机的运转是由电脉冲信号控制的,步进电动机的角位移量或线位移量与脉冲数成正比,每给一个脉冲,步进电机就转动一个角度(步距角)或前进/倒退一步。
步进电机旋转的角度由输入的电脉冲数确定,所以,也有人称步进电动机为一个数字/角度转换器。
当某一相绕阻通电时,对应的磁极产生磁场,并与转子形成磁路,这时,如果定子和转子的小齿没有对齐,在磁场的作用下,由于磁通具有力图走磁阻最小路径的特点,转子将转动一定的角度,使转子与定子的齿相互对齐,由此可见,错齿是促使电机旋转的原因。
DRJL
 升级会员
升级会员 