上水箱液位PID整定实验.doc
《上水箱液位PID整定实验.doc》由会员分享,可在线阅读,更多相关《上水箱液位PID整定实验.doc(4页珍藏版)》请在冰豆网上搜索。
姓名xx学号xx实验室数图xx
实验时间:
第8周星期二第9-12节指导老师xx老师
实验四、上水箱液位PID整定实验
一、实验目的
1)通过实验熟悉单回路反馈控制系统的组成和工作原理。
2)分析分别用P、PI和PID调节时的过程图形曲线。
3)定性地研究P、PI和PID调节器的参数对系统性能的影响。
二、实验设备
扰动
AE2000A型过程控制实验装置、上位机软件、计算机、RS232-485转换器1只、串口线1根、万用表一只
液位
三、实验原理
给定
上水箱
电动调节阀
PID控制器
─
+
液位变送器
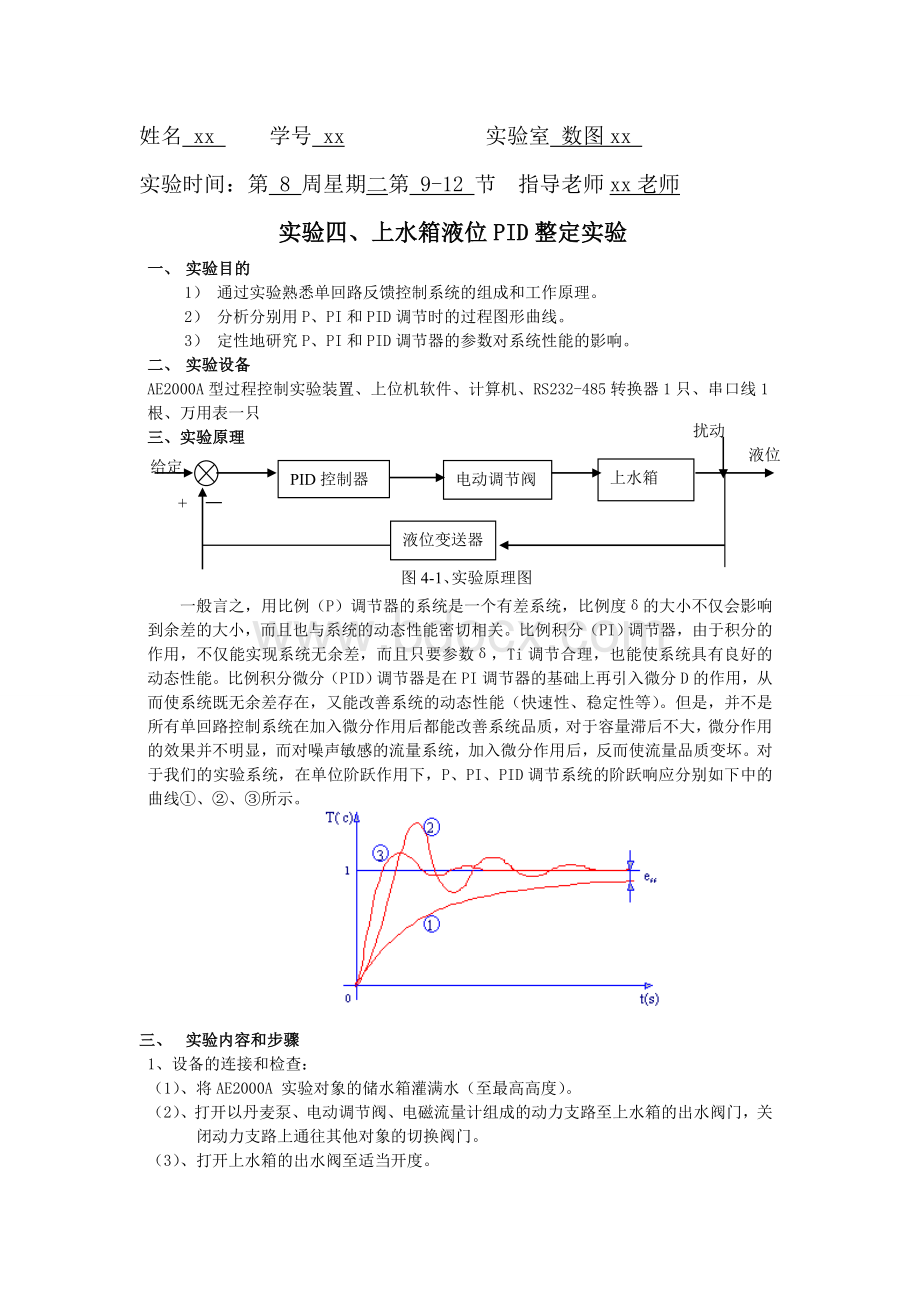
图4-1、实验原理图
一般言之,用比例(P)调节器的系统是一个有差系统,比例度δ的大小不仅会影响到余差的大小,而且也与系统的动态性能密切相关。
比例积分(PI)调节器,由于积分的作用,不仅能实现系统无余差,而且只要参数δ,Ti调节合理,也能使系统具有良好的动态性能。
比例积分微分(PID)调节器是在PI调节器的基础上再引入微分D的作用,从而使系统既无余差存在,又能改善系统的动态性能(快速性、稳定性等)。
但是,并不是所有单回路控制系统在加入微分作用后都能改善系统品质,对于容量滞后不大,微分作用的效果并不明显,而对噪声敏感的流量系统,加入微分作用后,反而使流量品质变坏。
对于我们的实验系统,在单位阶跃作用下,P、PI、PID调节系统的阶跃响应分别如下中的曲线①、②、③所示。
三、实验内容和步骤
1、设备的连接和检查:
(1)、将AE2000A实验对象的储水箱灌满水(至最高高度)。
(2)、打开以丹麦泵、电动调节阀、电磁流量计组成的动力支路至上水箱的出水阀门,关闭动力支路上通往其他对象的切换阀门。
(3)、打开上水箱的出水阀至适当开度。
(4)、检查电源开关是否关闭。
2、系统连线:
1)、三相电源、单相Ⅰ空气开关打在关的位置。
2)、智能调节仪的~220V的电源开关打在关的位置。
3)、将I/O信号接口板上的上水箱液位的钮子开关打到OFF位置。
4)、将上水箱液位+(正极)接到任意一个智能调节仪的1端(即RSV的正极),将上水箱液位-(负极)接到智能调节仪的2端(即RSV的负极)。
5)、将智能调节仪的4~20mA输出端的7端(即正极)接至电动调节阀的4~20mA输入端的+端(即正极),将智能调节仪的4~20mA输出端的5端(即负极)接至电动调节阀的4~20mA输入端的-(即负极)。
3、启动实验装置
1)、将实验装置电源插头接到380V的三相交流电源。
2)、打开电源三相带漏电保护空气开关,电压表指示380V。
3)、打开总电源钥匙开关,按下电源控制屏上的启动按钮,即可开启电源
4)、开启单相Ⅰ,调整好仪表各项参数(仪表初始状态为手动且为0)和液位传感器的零位。
5)、启动智能仪表,设置好仪表参数。
(一)比例调节控制
1)、启动计算机MCGS组态软件,进入实验系统选择相应的实验,如图4-4所示:
图4-4、实验软件界面
2)、打开电动调节阀和单相电源泵开关,开始实验。
3)、设定给定值,调整P参数。
4)、待系统稳定后,对系统加扰动信号(在纯比例的基础上加扰动,一般可通过改变设定值实现)。
记录曲线在经过几次波动稳定下来后,系统有稳态误差,并记录余差大小。
5)、减小P重复步骤4,观察过渡过程曲线,并记录余差大小。
6)、增大P重复步骤4,观察过渡过程曲线,并记录余差大小。
7)、选择合适的P,可以得到较满意的过渡过程曲线。
改变设定值(如设定
值由50%变为60%),同样可以得到一条过渡过程曲线。
8)、注意:
每当做完一次试验后,必须待系统稳定后再做另一次试验。
(二)、比例积分调节器(PI)控制
1)、在比例调节实验的基础上,加入积分作用,即在界面上设置I参数不为0,观察被控制量是否能回到设定值,以验证PI控制下,系统对阶跃扰动无余差存在。
2)、固定比例P值(中等大小),改变PI调节器的积分时间常数值Ti,然后观察加阶跃扰动后被调量的输出波形,并记录不同Ti值时的超调量σp。
表二、不同Ti时的超调量σp
积分时间常Ti
大
中
小
超调量σp
38.5%
42.5%
59.3%
3)、固定I于某一中间值,然后改变P的大小,观察加扰动后被调量输出的动态波形,据此列表记录不同值Ti下的超调量σp。
表三、不同δ值下的σp
比例P
大
中
小
超调量σp
43.3%
29%
20.4%
4)、选择合适的P和Ti值,使系统对阶跃输入扰动的输出响应为一条较满意的过渡过程曲线。
此曲线可通过改变设定值(如设定值由50%变为60%)来获得。
(三)、比例积分微分调节(PID)控制
1)、在PI调节器控制实验的基础上,再引入适量的微分作用,即把软件界面上设置D参数,然后加上与前面实验幅值完全相等的扰动,记录系统被控制量响应的动态曲线,并与实验
(二)PI控制下的曲线相比较,由此可看到微分D对系统性能的影响。
2)、选择合适的P、Ti和Td,使系统的输出响应为一条较满意的过渡过程曲线(阶跃输入可由给定值从50%突变至60%来实现)。
3)、在历史曲线中选择一条较满意的过渡过程曲线进行记录。
五、实验结果
1、P控制
比例度:
1积分时间:
0微分时间:
0
σ=(27.2-20)/20=36%
P调节器控制时的阶跃响应曲线:
2、PI控制
比例度:
0.9积分时间:
2.0微分时间:
0
σ=(23.9-15)/15=59.33%
PI调节器控制时的阶跃响应曲线:
3、PID控制
比例度:
1.3积分时间:
2.0微分时间:
4.0
σ=(25.8-20)/20=29%
PID调节器控制时的阶跃响应曲线:
六、思考题
1)、实验系统在运行前应做好哪些准备工作?
答:
储水箱灌满水,上水箱出水阀打开适当开度,系统线路图连好。
2)、为什么要强调无扰动切换?
答:
因为系统存在微分环节,如果有扰动时则会使系统引起很大的波动,使曲线不能趋近于平稳。
3)、试定性地分析三种调节器的参数δ、(δ、Ti)和(δ、Ti和Td)的变化对控制过程各产生什么影响?
答:
参数δ可以使余差减小;δ、Ti可以把余差全部累加起来,从而减小误差;δ、Ti和Td可以使超调量减小,从而是体统尽快达到最大值,减小上升时间。
4)、如何实现减小或消除余差?
纯比例控制能否消除余差?
答:
纯比例控制不能消除余差。
增加一个积分控制,把所有的余差累加起来,这样可以消除余差。
 升级会员
升级会员 