SCMA中的消息传递算法MPA仿真程序.txt
《SCMA中的消息传递算法MPA仿真程序.txt》由会员分享,可在线阅读,更多相关《SCMA中的消息传递算法MPA仿真程序.txt(3页珍藏版)》请在冰豆网上搜索。
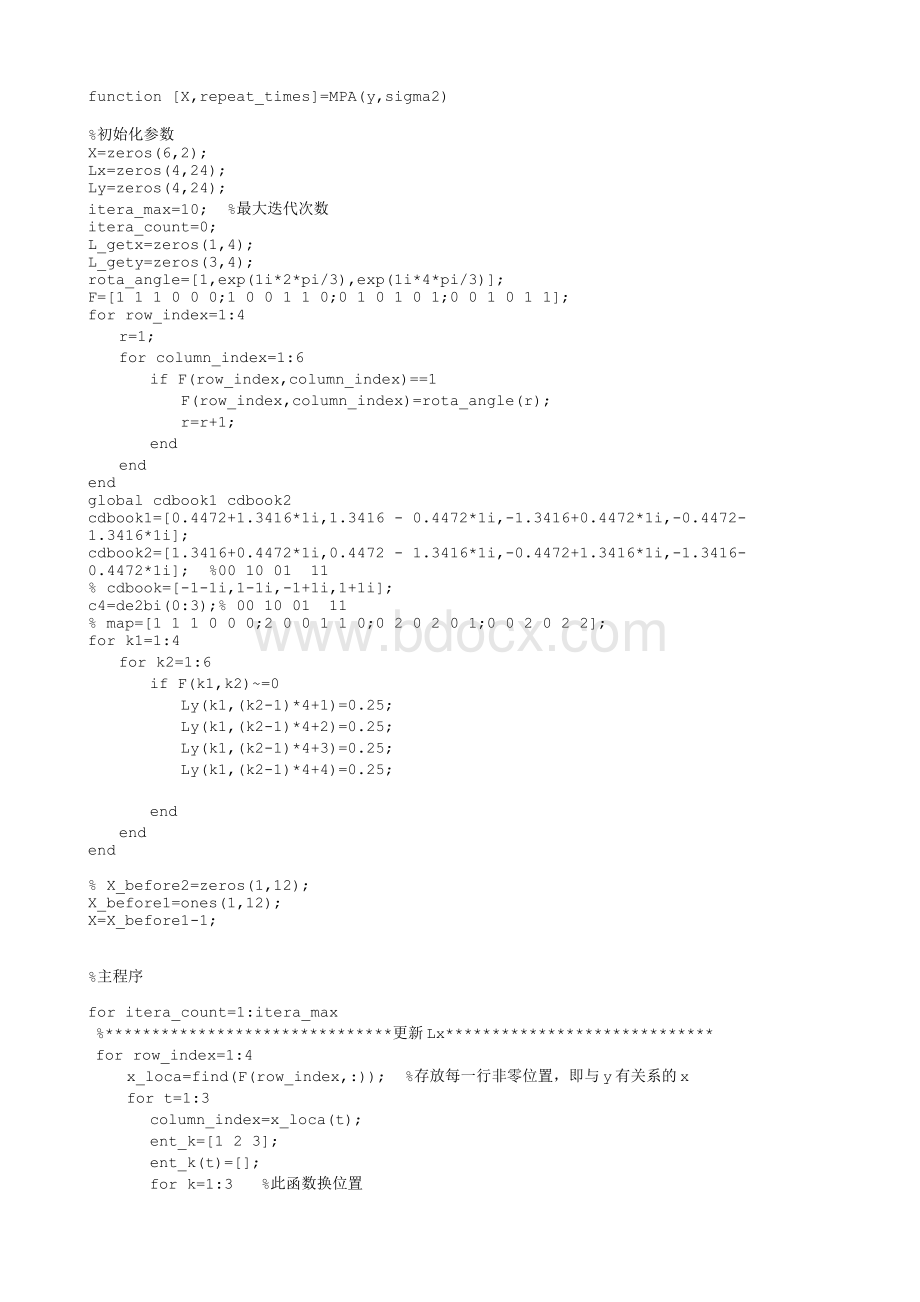
function[X,repeat_times]=MPA(y,sigma2)
%��ʼ������
X=zeros(6,2);
Lx=zeros(4,24);
Ly=zeros(4,24);
itera_max=10;%����������
itera_count=0;
L_getx=zeros(1,4);
L_gety=zeros(3,4);
rota_angle=[1,exp(1i*2*pi/3),exp(1i*4*pi/3)];
F=[111000;100110;010101;001011];
forrow_index=1:
4
r=1;
forcolumn_index=1:
6
ifF(row_index,column_index)==1
F(row_index,column_index)=rota_angle(r);
r=r+1;
end
end
end
globalcdbook1cdbook2
cdbook1=[0.4472+1.3416*1i,1.3416-0.4472*1i,-1.3416+0.4472*1i,-0.4472-1.3416*1i];
cdbook2=[1.3416+0.4472*1i,0.4472-1.3416*1i,-0.4472+1.3416*1i,-1.3416-0.4472*1i];%00100111
%cdbook=[-1-1i,1-1i,-1+1i,1+1i];
c4=de2bi(0:
3);%00100111
%map=[111000;200110;020201;002022];
fork1=1:
4
fork2=1:
6
ifF(k1,k2)~=0
Ly(k1,(k2-1)*4+1)=0.25;
Ly(k1,(k2-1)*4+2)=0.25;
Ly(k1,(k2-1)*4+3)=0.25;
Ly(k1,(k2-1)*4+4)=0.25;
end
end
end
%X_before2=zeros(1,12);
X_before1=ones(1,12);
X=X_before1-1;
%������
foritera_count=1:
itera_max
%*******************************����Lx*****************************
forrow_index=1:
4
x_loca=find(F(row_index,:
));%���ÿһ�з���λ�ã�����y�й�ϵ��x
fort=1:
3
column_index=x_loca(t);
ent_k=[123];
ent_k(t)=[];
fork=1:
3%�˺�����λ��
L_gety(k,1)=Ly(row_index,(x_loca(k)-1)*4+1);
L_gety(k,2)=Ly(row_index,(x_loca(k)-1)*4+2);
L_gety(k,3)=Ly(row_index,(x_loca(k)-1)*4+3);
L_gety(k,4)=Ly(row_index,x_loca(k)*4);
end
%�����ĸ�����ֵ,3��x��64�ַ��ŵ�ȫ����
x_map=zeros(1,3);
forx_k=1:
4%��ǰ���xk����Ӧt
x_map(t)=const_map(x_k,row_index,x_loca(t));%����ӳ��
fork2=1:
4
x_map(ent_k
(1))=const_map(k2,row_index,x_loca(ent_k
(1)));%����ӳ��
fork3=1:
4
x_map(ent_k
(2))=const_map(k3,row_index,x_loca(ent_k
(2)));%����ӳ��
x_map_rota=x_map.*rota_angle;
y_map=sum(x_map_rota);
temp=L_gety(ent_k
(1),k2)*L_gety(ent_k
(2),k3);
dif_y(k2,k3)=y(row_index)-y_map;
Lx_xk_temp(k2,k3)=temp*exp(-0.5/sigma2*(abs(dif_y(k2,k3)))^2);
end
end
Lx(row_index,(column_index-1)*4+x_k)=sum(sum(Lx_xk_temp));
end
%����normalization
lamada=1/(Lx(row_index,(column_index-1)*4+1)+Lx(row_index,(column_index-1)*4+2)+Lx(row_index,(column_index-1)*4+3)+Lx(row_index,(column_index-1)*4+4));
Lx(row_index,(column_index-1)*4+1)=lamada*Lx(row_index,(column_index-1)*4+1);
Lx(row_index,(column_index-1)*4+2)=lamada*Lx(row_index,(column_index-1)*4+2);
Lx(row_index,(column_index-1)*4+3)=lamada*Lx(row_index,(column_index-1)*4+3);
Lx(row_index,(column_index-1)*4+4)=lamada*Lx(row_index,(column_index-1)*4+4);
end
end
%***********************����Ly****************************************
forcolumn_index=1:
6
y_loca=find(F(:
column_index))';%����ת�����ÿһ�з���λ�ã�����x�й�ϵ��y
fort=1:
2
row_index=y_loca(t);
%�����ĸ�����ֵ
fork=1:
2
ifk~=t
L_getx
(1)=Lx(y_loca(k),(column_index-1)*4+1);
L_getx
(2)=Lx(y_loca(k),(column_index-1)*4+2);
L_getx(3)=Lx(y_loca(k),(column_index-1)*4+3);
L_getx(4)=Lx(y_loca(k),(column_index*4));
end
end
fork1=1:
4
Ly(row_index,(column_index-1)*4+k1)=L_getx(k1);
end
%��������
lamada=1/(Ly(row_index,(column_index-1)*4+1)+Ly(row_index,(column_index-1)*4+2)+Ly(row_index,(column_index-1)*4+3)+Ly(row_index,(column_index-1)*4+4));
Ly(row_index,(column_index-1)*4+1)=lamada*Ly(row_index,(column_index-1)*4+1);
Ly(row_index,(column_index-1)*4+2)=lamada*Ly(row_index,(column_index-1)*4+2);
Ly(row_index,(column_index-1)*4+3)=lamada*Ly(row_index,(column_index-1)*4+3);
Ly(row_index,(column_index-1)*4+4)=lamada*Ly(row_index,(column_index-1)*4+4);
end
end
end
%***********************�ж�һ��X***********************
fort=1:
6
y_loca=find(F(:
t));
p00=Lx(y_loca
(1),(t-1)*4+1)*Lx(y_loca
(2),(t-1)*4+1);
p10=Lx(y_loca
(1),(t-1)*4+2)*Lx(y_loca
(2),(t-1)*4+2);
p01=Lx(y_loca
(1),(t-1)*4+3)*Lx(y_loca
(2),(t-1)*4+3);
p11=Lx(y_loca
(1),(t-1)*4+4)*Lx(y_loca
(2),(t-1)*4+4);
p=[p00,p10,p01,p11];
%[~,K]=max(p);
%X_judge(t,:
)=c4(K,:
);
X_judge_out(t,:
)=[log((p10+p11)/(p01+p00)),log((p01+p11)/(p10+p00))];
end
%X=reshape(X_judge',1,12);
%ifitera_count>1
%ifX_before1==X
%repeat_times=itera_count;
%itera_count=itera_max;
%%end
%elseifitera_count==itera_max
%repeat_times=itera_max;
%end
%end
%end
%end
repeat_times=10;
X=reshape(X_judge_out',1,12);
end
 升级会员
升级会员 