永磁正弦无刷直流电动机力矩波动测量.docx
《永磁正弦无刷直流电动机力矩波动测量.docx》由会员分享,可在线阅读,更多相关《永磁正弦无刷直流电动机力矩波动测量.docx(8页珍藏版)》请在冰豆网上搜索。
永磁正弦无刷直流电动机力矩波动测量
永磁正弦无刷直流电动机力矩波动的测量
1引言
由于永磁正弦无刷直流电动机系统具有的高力矩性能使其适合在直接驱动中应用,而其力矩中的波动成分(波动力矩)对负载的运行有直接影响,因此对驱动电机波动力矩指标控制较为严格[1~3]。
本文针对波动力矩的测量问题,提出了两种测量方法,即平衡式直接测量法和电流式间接测量法。
在平衡式直接测量法中,提出了一种不同于一般结构[2,4]的方法,采用电阻应变仪作为力矩传感器,通过恒定负载平衡电机电磁力矩的恒定分量,通过力矩传感器检测波动力矩,并解决了负载力矩要求传感器大量程和波动力矩要求传感器高分辨率的矛盾[4]。
在电流式间接测量中,考虑到各相定子电流平方和的波动成分代表了电机的波动力矩,设计了相应的测量装置。
为了便于分析,首先给出力矩波动系数TRF的定义,力矩波动系数一般定义为波动力矩的峰值ΔTpp与平均力矩T-的比值
(1)
2 波动力矩的平衡式直接测量
2.1 平衡式直接测量方法的原理与装置
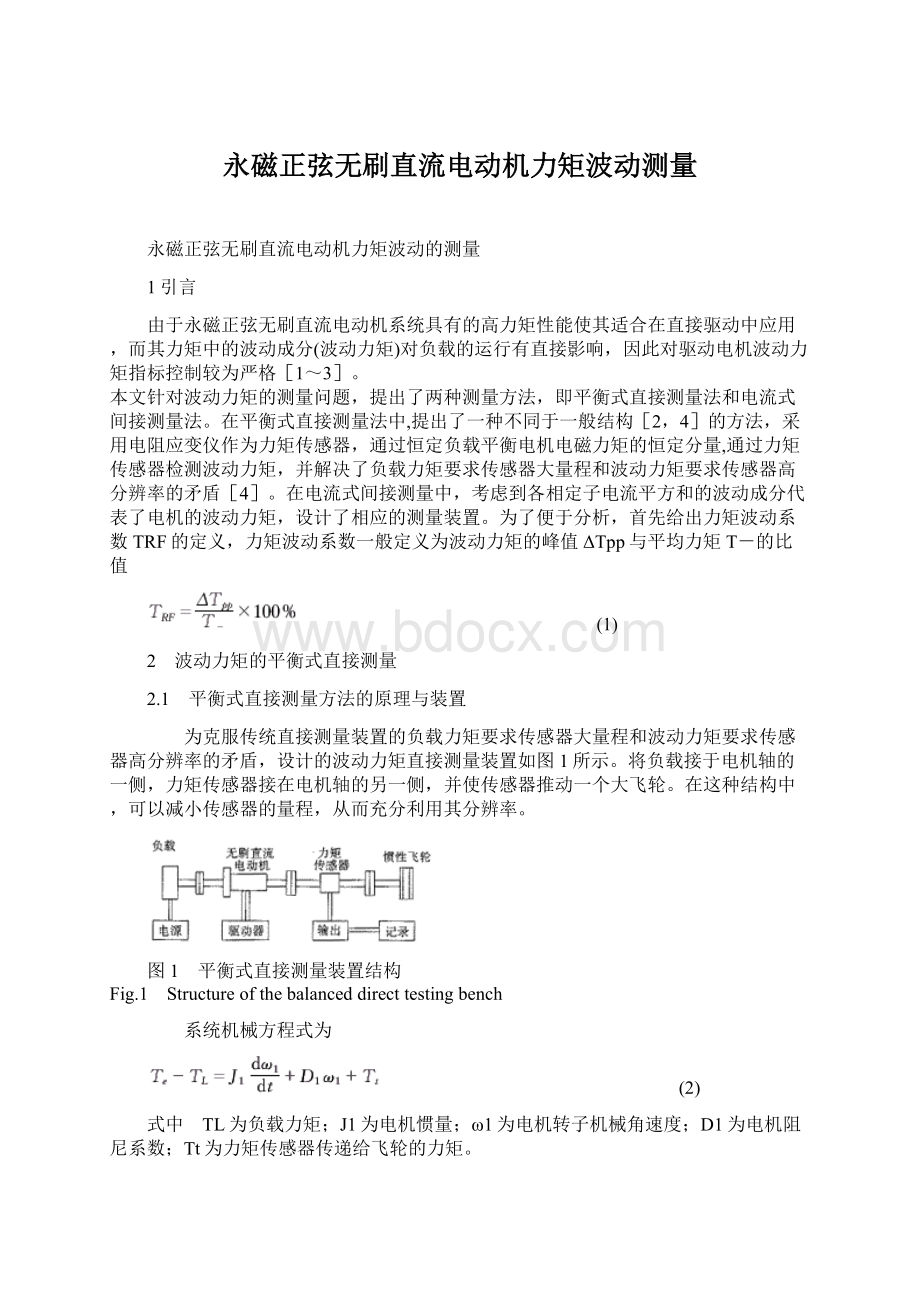
为克服传统直接测量装置的负载力矩要求传感器大量程和波动力矩要求传感器高分辨率的矛盾,设计的波动力矩直接测量装置如图1所示。
将负载接于电机轴的一侧,力矩传感器接在电机轴的另一侧,并使传感器推动一个大飞轮。
在这种结构中,可以减小传感器的量程,从而充分利用其分辨率。
图1 平衡式直接测量装置结构
Fig.1 Structureofthebalanceddirecttestingbench
系统机械方程式为
(2)
式中 TL为负载力矩;J1为电机惯量;ω1为电机转子机械角速度;D1为电机阻尼系数;Tt为力矩传感器传递给飞轮的力矩。
负载由磁粉制动器提供,通过控制励磁电流和制动器采用强迫水冷以保持负载力矩TL恒定。
对于力矩传感器和飞轮组成的机械系统有
(3)
式中 J2为飞轮的转动惯量;ω2为飞轮角速度;D2为飞轮阻尼系数。
力矩传感器和飞轮之间采用弹性连接,以保证力矩传感器可以产生形变,输出波动力矩信号。
由式
(2)可得
(4)
若电机不存在波动力矩,则电机系统的转速稳定,飞轮和电机以相同的角速度ωr旋转,即:
ω1=ω2=ωr=const (5)
将式(5)代入式(4),可得Tt为恒值,即输出力矩无波动。
将式(3)代入式
(2),可得整个测量装置的机械方程为
(6)
一般情况下,测量装置有飞轮的机械时间常数较大。
因此,若电机存在波动力矩,则ωr变化很小。
由式(4)可知,Te中的波动成分较完整地反映在Tt中,所以通过测量力矩传感器的输出可以得到电机的波动力矩成分。
2.2 测量的误差分析
力矩传感器为双臂梁结构的应变片结构,其输出为
(7)
式中 为力矩传感器常数,等于力矩传感器的受力点产生单位弧度形变所需施加的力矩,且该值很大;θ1为电机转子的角位移,θ2为飞轮的角位移。
用角位移表示式
(2)和式(3)
(8)
(9)
若将力矩传感器取下,将飞轮和电机转子刚性连接,并考虑式(3)后电机系统的机械方程为
(10)
式中 θ′1为无力矩传感器时电机的角位移。
若电机系统存在v次波动力矩,角位移可以表示为
θi=ωrt+Δθisin(vωrt+αvi) (11)
式中 θi=θ1或θ2或θ′1,Δθi=Δθ1或Δθ2或Δθ′1,为v次波动力矩对应的正弦角位移的幅值;αvi=αv1或αv2或α′v1,为v次波动力矩对应的正弦角位移的相位。
由式(11)得
(12a)
(12b)
(12c)
将式(12a)、(7)代入式(9),忽略阻尼力矩后对应v次波动力矩的正弦角位移的幅值
(13)
忽略阻尼力矩,利用式(12)、(13),可由式(9)、(10)得实际波动力矩与直接测量得到的波动力矩之比为
(14)
式中 Kv为直接测量方法v次波动力矩测量结果的修正系数。
式(14)表明直接法的测量值一般略小于实际的波动力矩值。
2.3 平衡式直接测量方法的实验研究
在不同状态下,采用平衡式直接测量方法对正弦波驱动无刷直流电动机样机的波动力矩进行测量。
样机参数如表1所示。
表1 正弦波驱动无刷直流电动机系统的样机参数
Tab.1 Parameterofthesinwavedrivenbrushless
DCmotorsystembeingtested
极对数P
额定转速
nN/(r。
min-1)
额定力矩
TN/(N。
m)
相电阻
R/Ω
相电感
L/mH
12
120
2000
0.28
1.9
图2是由于相电流中有直流成分存在,在该状态下测得的样机波动力矩曲线1,波动力矩的成分主要为每机械圆周p次和6p次,由式
(1)定义的力矩波动系数为4.7%。
又J1/J2≈0.1,所以由式(14)确定的修正系数约为1.1,修正后的力矩波动系数约为5.17%。
图3是由于相电流中存在幅值偏差、相位偏差,在该状态下测得的样机波动力矩曲线2,波动力矩的成分主要为每机械圆周2p次和6p次,由式
(1)定义的力矩波动系数为4.95%。
修正后力矩波动系数约为5.45%。
图2 直接测量方法测得的波动力矩曲线1
Fig.2 Curve1oftherippletorqueby
thedirecttestingmethod
图3 直接测量方法测得的波动力矩曲线2
Fig.3 Curve2oftherippletorqueby
thedirecttestingmethod
3 波动力矩电流式间接测量
波动力矩的电流式间接测量方法是根据无刷直流电动机系统的波动力矩公式,通过测量电机的相电压、相电流、角速度等物理参量,经处理得到电机输出力矩的波动量,即波动力矩成分。
3.1 电流式间接测量方法的原理
在正弦驱动的无刷直流电动机系统中,若电机的各相磁链和定子各相电流均为正弦时,理论上电机的输出力矩不存在波动力矩。
在设计永磁正弦无刷直流电动机系统时,通过电磁场反问题求解设计的永磁磁钢形状,气隙磁场的正弦波波形失真度小于0.8%,工程上可以认为电机的各项磁量正弦对称。
这样,克服了文[2]提出的由于气隙磁场畸变引起电势非正弦问题。
在这种条件下,波动力矩主要来源于定子线电流同标准正弦波之间的偏差。
不失一般性,设电机为三相。
将电机各量取标幺值,设磁链为三相对称正弦,定子三相电流同正弦波的偏差分别为Δi*A、Δi*B、Δi*C,则有
(15)
(16)
利用ej=ωeΨj,将式(15)(16)代入力矩计算公式可得
(17)
式中 T*r为标幺值下的波动力矩,且
(18)
将式(16)中的各相电流平方,然后相加有
(19)
式中 V*I为电流的平方和。
式(19)右端的第三项为电流偏差的平方和,相对于第二项为二阶微量,可以忽略;于是式(19)可以简化为
(20)
式中 I*r为定子电流平方和中的波动分量,且有
(21)
由式(18)(20)可得
I*r=2T*r (22)
式(22)表明定子各相电流平方和中的波动分量I*r完整的反映了波动力矩T*r,前者在大小上是后者的两倍。
同时电流平方和中的恒定部分同力矩恒定部分相对应。
故通过测量各项电流的平方和,即可得到电机的波动力矩T*r。
3.2 电流式间接测量方法的实现
电流式间接测量方法的实现,关键是三相电流信号的获得和各相电流平方的运算。
为使测量具有较好的实时性,硬件采用模拟器件来完成。
电机三相电流的取样用电流型霍尔传感器,平方运算由模拟乘法器完成。
电流式间接测量方法实现的原理如图4所示。
由于无刷直流电动机系统采用直接驱动方式,电机的转速一般比较低,所以样机波动力矩的频率在1?
kHz以内,位于各器件的带宽之内;各器件的精度指标比力矩波动系数TRF高一个数量级,所以选用上述精度的器件引入的测量误差很小。
电流型霍尔传感器的输出为
VH=KHi (23)
式中 VH为霍尔传感器的输出;KH为霍尔传感器的系数;i为定子相电流。
模拟乘法器可完成如下功能
(24)
式中 VSF为模拟乘法器的参考电压。
由图4及式(23)、式(24)可得
(25)
式中 KI为间接测量方法的系数,KI=K2H/VSF。
从式(25)可知,图4完成了定子各相电流平方和的功能,Vout是电流平方相加的结果,其成分代表了力矩的恒值及波动部分,波动部分的一半与恒定部分的比值即为波动力矩的标幺值。
测量方法具有良好的实时性。
图4 电流式间接测量方法实现原理
Fig.4 Operationprincipleoftheindirecttestingmethod
3.3 电流式间接测量方法的实验研究
样机的气隙磁场经优化设计为正弦分布,转子磁钢为相对磁导率μr=1.05的稀土永磁材料,所以电机的等效气隙很大,负载后的电枢反应对气隙磁场影响很小电机反电势中谐波成分如表2所示,其谐波成分在0.8%以下,工程可以认为样机的磁链是三相对称正弦。
表2 样机的反电势谐波成份
Tab.2 HarmonicsofEMFofthemotorbeingtested
谐波次数
基波
5次
7次
11次
13次
幅值/%
100
0.73
0.23
0.1
0.15
图5为间接测量方法测得的样机波动力矩曲线1,曲线以力矩的标幺值表示,图中的2π表示一个电周期。
波动力矩的成分主要为每机械圆周P次和6P次,由式
(1)定义的力矩波动系数为5.26%。
图5 间接测量方法测得的波动力矩曲线1
Fig.5 Curve1oftherippletorqueby
theindirecttestingmethod
图6为间接测量方法测得的样机波动力矩曲线2,曲线以力矩的标幺值表示。
波动力矩成分主要为波动系数为5.6%。
图6 间接测量方法测得的波动力矩曲线2
Fig.6 Curve2oftherippletorqueby
theindirecttestingmethod
4 结论
(1)提出了新型平衡式直接测量装置结构,分析了力矩传感器和飞轮引起的误差,推导了修正系数。
(2)提出用测量定子电流平方和方式的电流式间接测量波动力矩的方法,采用霍尔传感器和模拟乘法器实现了波动力矩的间接测量。
(3)在相同的状态下,通过平衡式直接法对电流式间接测量方法的测量结果进行了验证。
 升级会员
升级会员 