Matlab-Simulink中Clark变换和Park变换的深度总结.docx
《Matlab-Simulink中Clark变换和Park变换的深度总结.docx》由会员分享,可在线阅读,更多相关《Matlab-Simulink中Clark变换和Park变换的深度总结.docx(4页珍藏版)》请在冰豆网上搜索。
Matlab_Simulink中Clark变换和Park变换的深度总结
最近搞三相并网逆变系统,对这个坐标变换产生了很多疑惑。
调模型,排错,最后发现坐标变换这个地方出来的波形总是和我设想的不一样。
以前认为坐标变换都是死的,带公式即可,经过这几天的研究,发现这里面真的有些方法。
基于MATLAB/Simulink中的模块,我也发现了Simulink中和一些书上不一样的地方。
而且现在这个坐标变换每本书上的表示方法都不一样,甚至字母都有好多种。
下面我想基于MATLAB/Simulink深刻的总结一下三相交流控制系统常用的两个变换Clark(3-2)变换和Park(2-2)变换。
首先来搞清楚为什么要用这两个变换,在三相交流系统中,常用的控制器还是经典的PI调节器。
PI调节器可以对直流量进行无净差的调节,而交流量就不行,所以需要将三相交流分量转化为两项直流分量加以控制。
接下来看看Clark变换(3-2)原理。
由于三相分量幅值相等,相位相差120,角速度相等,因此三相分量存在信息冗余,这时,可以去掉一项将其化为两相,这就是Clark变换的作用。
由于两项分量所在的坐标轴是静止的,所以我们把此坐标轴称为两相静止坐标系。
也就是说平面上的原来基于三相静止坐标系的矢量,可以切换到两相静止坐标系表示。
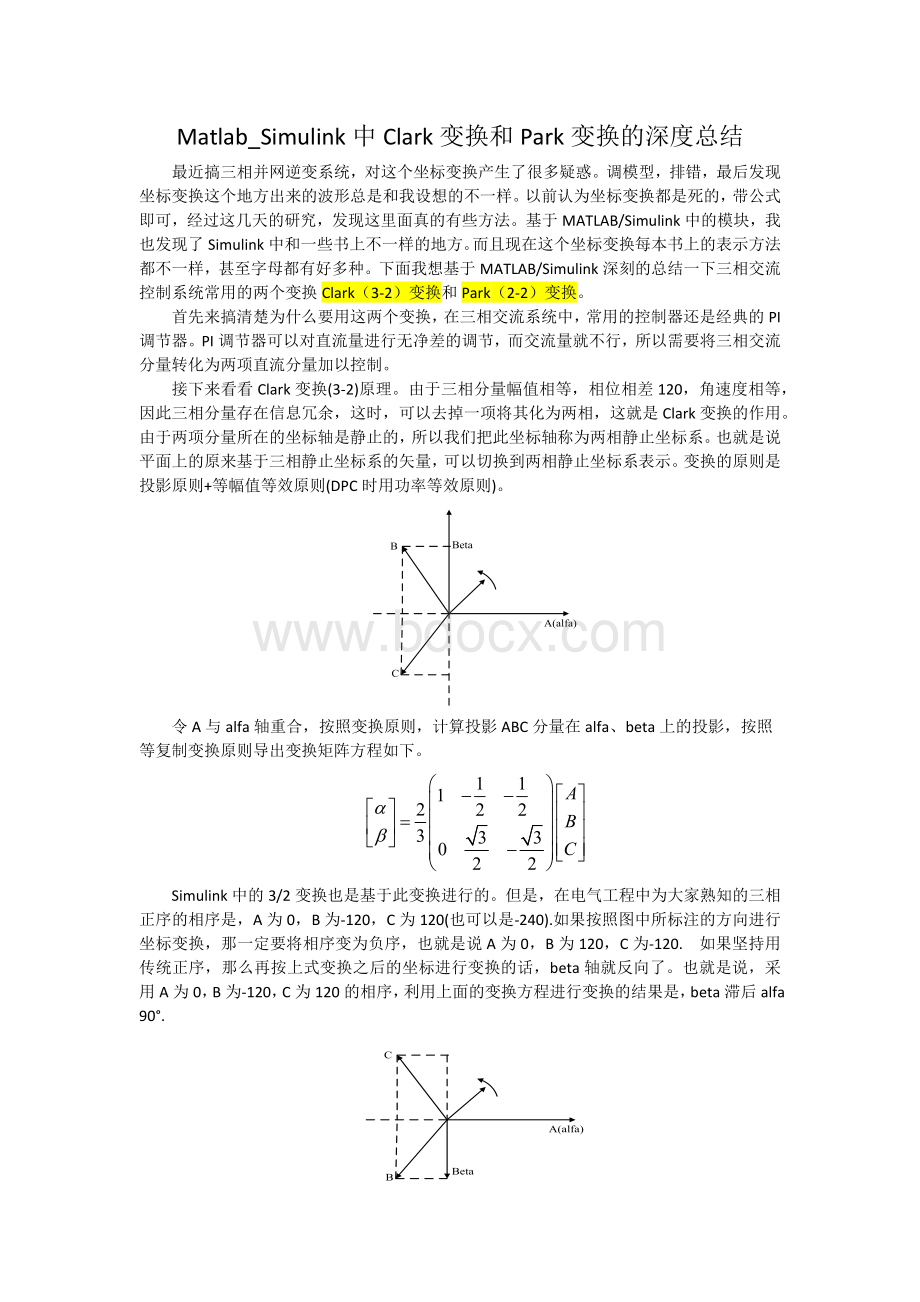
变换的原则是投影原则+等幅值等效原则(DPC时用功率等效原则)。
令A与alfa轴重合,按照变换原则,计算投影ABC分量在alfa、beta上的投影,按照等复制变换原则导出变换矩阵方程如下。
Simulink中的3/2变换也是基于此变换进行的。
但是,在电气工程中为大家熟知的三相正序的相序是,A为0,B为-120,C为120(也可以是-240).如果按照图中所标注的方向进行坐标变换,那一定要将相序变为负序,也就是说A为0,B为120,C为-120.如果坚持用传统正序,那么再按上式变换之后的坐标进行变换的话,beta轴就反向了。
也就是说,采用A为0,B为-120,C为120的相序,利用上面的变换方程进行变换的结果是,beta滞后alfa90°.
下面再看Simulink中的波形图。
这是传统的正序的三相正弦交流电。
(A为0,B为120,C为-120)下面用Simulink自带的坐标变换模块进行3/2变换。
波形如下。
可以看到,当alfa(黄)为0的时候,beta(蓝)为-90也就验证了上面说的。
所以采用MATLAB自带的模块,变换传统正序的时候并不能让beta超前alfa90°,反而滞后90°那么如何去修正?
很简单,直接将变换矩阵第二行所有元素的符号反号即可。
即:
修改后:
可以看到这是beta已经超前于alfa90°了。
本来以为可以解决问题了,然后发现Park变换波形居然是交流。
下面讨论Park变换。
Park变换的目的是将两相交流转换为两相直流。
原理是将原本平面静止的两相坐标系以同平面旋转矢量相同的角速度旋转起来,与其相对静止,这时原来的旋转矢量可以看做是相对于坐标系静止的直流分量。
称这两分量为d,q分量。
一般的教材如上图所示,通过投影原则,得出变换矩阵方程如下:
如果用以上我们修改之后的3-2变换矩阵得到的alfa,beta用来这里的2-2变换,照道理可以通过此图得到直流分量。
但是在Simulink却是交流,而不是直流。
但如果用它自带的3-2变换得到的alfa,beta用来这里的2-2变换,可以得到正确的直流分量,但q轴分量为负(从这幅图上看当基于D轴定向时,q轴应该为正,应为q轴超前d轴90°)。
这是怎么回事呢?
这时我就试着从其它自带的模块开始研究,也就是在下图上看出一些问题。
可以看到,这里的beta是滞后的,若用这个标准按照上面2-2变换得到下图。
只有这样可以说的同,也就是说按照自带模块的变换原则,就如上图所示,若基于d轴定向,这输出波形为:
这里可以看到由于们定义的旋转方向和theta相反,所以这里是个Q是个负的。
其实simulink是默认的顺时针为旋转正方向,我们们默认的是逆时针旋转方向,也就是theta正负的问题,因此如果要采用书上的标准,如下图。
3-2变换2-2变换
不仅要将3-2变换矩阵改过来,而且也要讲锁相环出来的theta角度变为负数,或者直接将2-2变换矩阵中的theta反号。
这样就可以完全和书上的对应。
下图可以见到,若以d轴定向,则d分量为0,q分量为正的幅值,和上面的图对应起来
所以总结一下,若采用顺时针旋转模式(Simulink模式),则保持原来两个矩阵不动。
若采用逆时针模式(习惯模式),则3-2变换中第二行元素反号,theta反号。
其实归根到底就是一个旋转方向的问题。
By蓝光三角洲Blueray@CQU.
 升级会员
升级会员 