计控实验四 最小拍系统设计.docx
《计控实验四 最小拍系统设计.docx》由会员分享,可在线阅读,更多相关《计控实验四 最小拍系统设计.docx(13页珍藏版)》请在冰豆网上搜索。
计控实验四最小拍系统设计
实验报告
|
|
实验名称最小拍系统设计实验
课程名称计算机控制技术与系统
|
|
实验四最少拍系统设计实验
1、实验目的
掌握最少拍系统的设计方法。
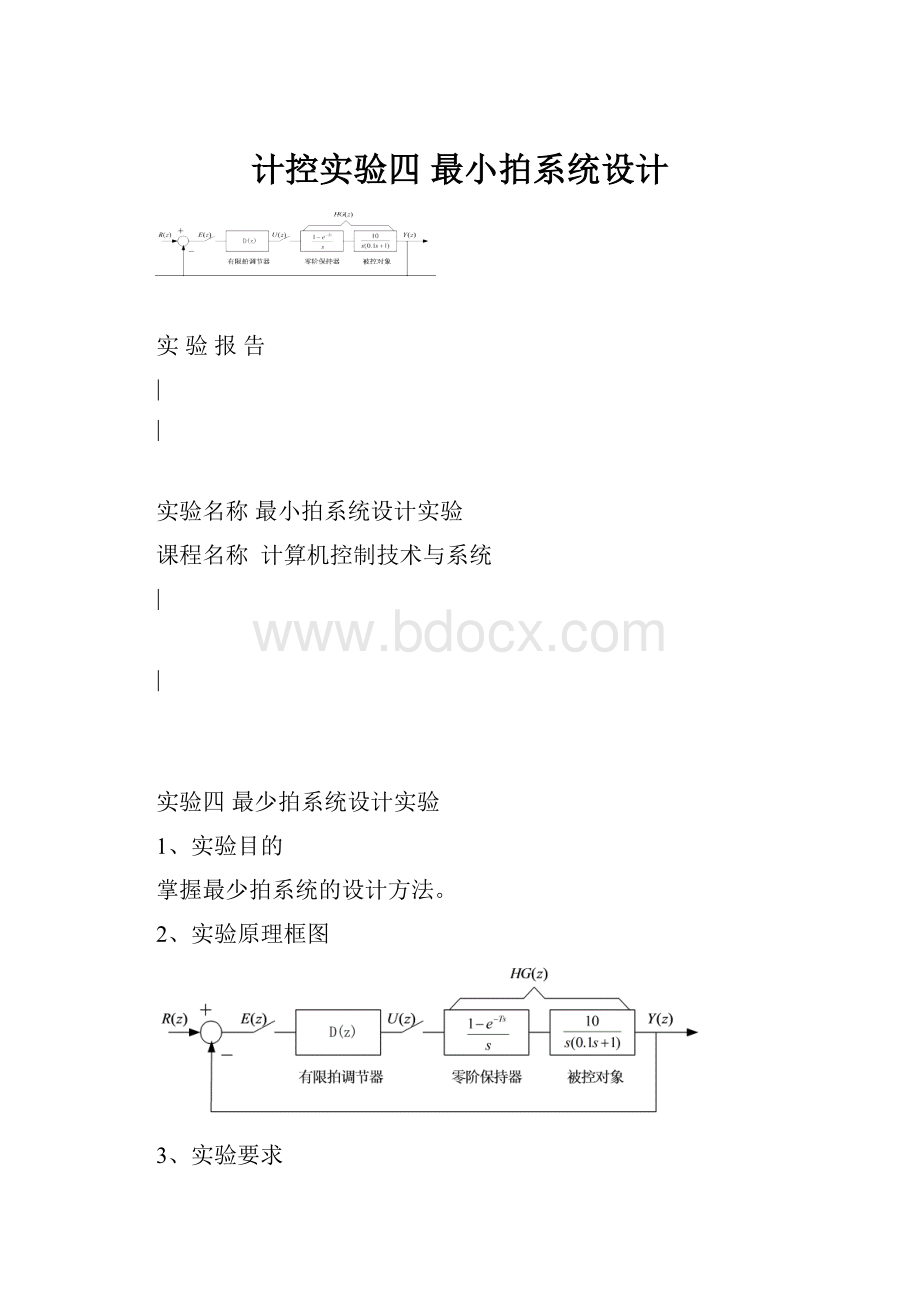
2、实验原理框图
3、实验要求
设被控对象为
要求:
(1)采样时间T=1s,采用零阶保持器,使用Matlab求取出广义对象的z传递函数;
(2)设计单位阶跃输入下的最少拍控制器D(z),给出设计过程;
(3)控制系统仿真结果及分析(系统是否稳定?
有无纹波?
几步跟踪?
);
(4)仿真系统对输入信号(斜坡、单位加速度)的灵敏性,观察系统性能变化。
4、实验过程
4.1使用Matlab求取Z传函
利用matlab语句求取广义对象的Z传递函数并将其转换为零极点形式,用到的程序如下:
T=1;
z0=[];
p0=[00-1.252];
k0=2.1;
G0=zpk(z0,p0,k0);
sysd=c2d(G0,T,'zoh')
得到的广义对象的z传递函数为
4.2单位阶跃输入下,理想最小拍系统的设计与仿真
典型的输入函数为
设闭环脉冲传递函数为
,误差表达式设为
,数字控制器为D(z)。
则依据理想最小拍系统的设计原则有
,
其中p表示系统稳定所需要的拍数。
若要使数字控制器形势最简单,阶次最低,取F(z)=1,则
单位阶跃输入r(t)=1对应的z传递函数为
单位阶跃输入对应的q=1,则p=1。
可以得到
则数字控制器的表达式D(z)为
在simulink中仿真改系统,建立的框图为
得到的控制量的曲线为
得到的系统输出曲线为
可以发现对于该对象,理想最小拍控制器并不能使系统最终稳定下来。
分析广义对象的z传递函数
可以发现广义对象在单位圆外有一个零点,在单位圆上有两个极点。
这是造成理想最小拍控制系统输出不能稳定的原因。
4.3单位阶跃输入下,有波纹最小拍系统的设计与仿真
设闭环脉冲传递函数为
,误差表达式设为
,数字控制器为D(z)。
有波纹最小拍系统的设计原则为
依据此式可以设
解得
则数字控制器的表达式D(z)为
在simulink中仿真改系统,建立的框图为
得到的控制量的曲线为
得到的系统输出曲线为
最终系统能够稳定下来,而且输出只需要两拍既能够稳定下来。
4.4单位阶跃输入下,无波纹最小拍系统的设计与仿真
设闭环脉冲传递函数为
,误差表达式设为
,数字控制器为D(z)。
有波纹最小拍系统的设计原则为
依据此式可以设
解得
则数字控制器的表达式D(z)为
在simulink中仿真改系统,建立的框图为
得到的控制量的曲线为
得到的系统输出曲线为
观察输出曲线可以发现输出曲线只需要三拍即可跟踪上输出并稳定下来。
4.5有无波纹最小拍控制系统对比及分析
比较两条曲线可以发现,无波纹最小拍控制器的输出变化的幅值更小,而稳定下来所需的时间也更短。
这说明,就控制量的输出而言,无波纹控制器更优于有波纹控制器。
比较两条曲线,可以发现无波纹控制系统下输出的变化幅度相对更小一些,这说明无波纹控制系统稳定性更好。
比较稳定时间可以发现无波纹控制系统的稳定时间要比有波纹控制系统多一拍。
这说明无波纹控制器是以牺牲速度来换取系统的稳定性。
4.6仿真验证对不同输入信号的灵敏性
(1)当输入信号为单位斜坡信号时
三种最小拍控制器控制量的输出曲线分别为
三种最小拍控制系统的输出曲线分别为
观察以上几条曲线可以发现系统最终的输出都不能稳定,这说明基于阶跃信号设计的理想最小拍控制系统、有波纹最小拍控制系统、无波纹最小拍控制系统对单位斜坡信号灵敏性较差。
(2)当输入信号为单位加速度信号时
三种最小拍控制器控制量的输出曲线分别为
三种最小拍控制系统的输出曲线分别为
观察以上几条曲线可以发现系统最终的输出都不能稳定,这说明基于阶跃信号设计的理想最小拍控制系统、有波纹最小拍控制系统、无波纹最小拍控制系统对单位加速度信号灵敏性较差。
 升级会员
升级会员 