基于MATLAB的六杆机构动力学分析与仿真.docx
《基于MATLAB的六杆机构动力学分析与仿真.docx》由会员分享,可在线阅读,更多相关《基于MATLAB的六杆机构动力学分析与仿真.docx(18页珍藏版)》请在冰豆网上搜索。
基于MATLAB的六杆机构动力学分析与仿真
六杆机构的动力学分析仿真
一系统模型建立
为了对机构进行仿真分析,首先必须建立机构数学模型,即位置方程,然后利用MATLAB仿真分析工具箱Simulink对其进行仿真分析。
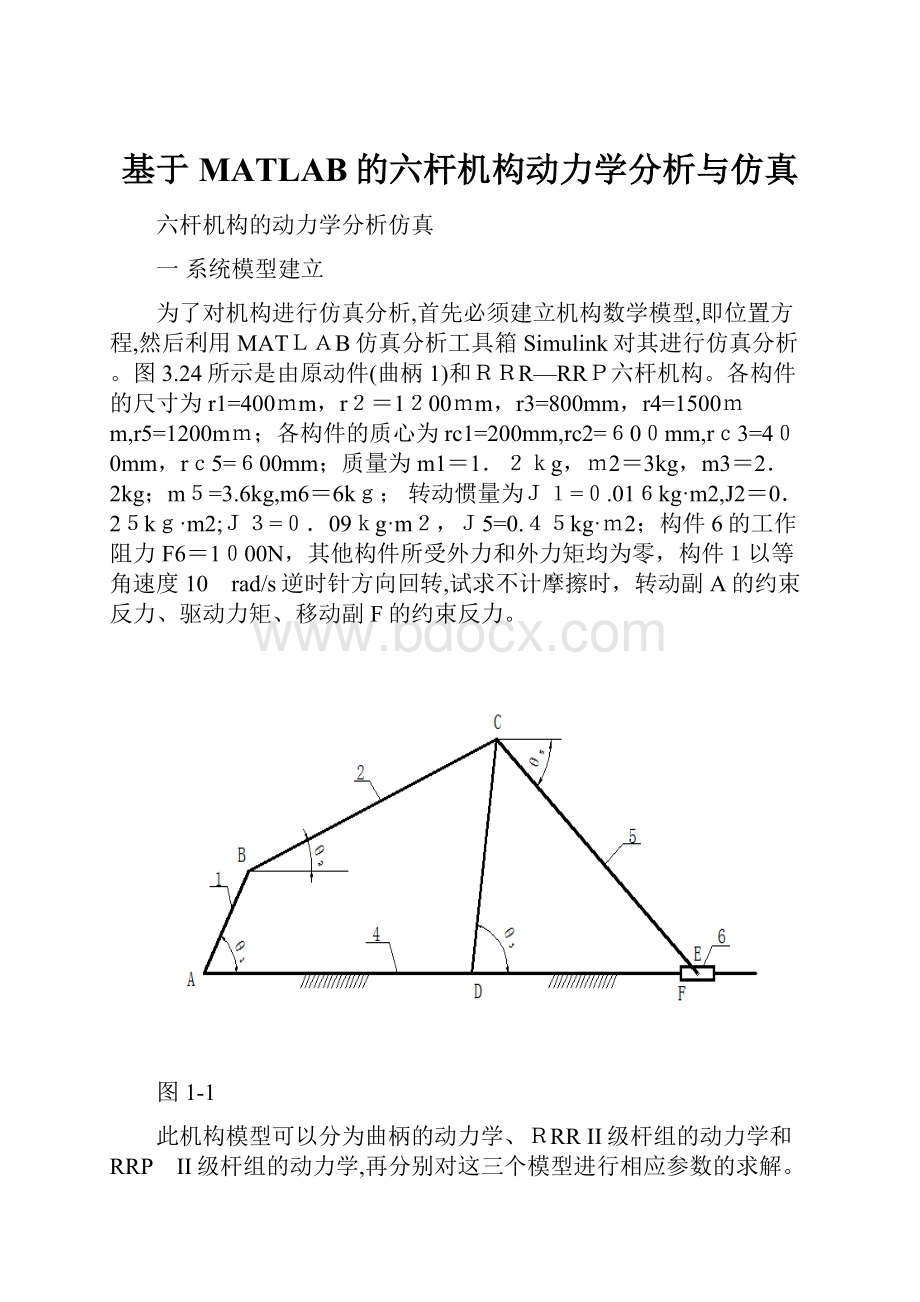
图3.24所示是由原动件(曲柄1)和RRR—RRP六杆机构。
各构件的尺寸为r1=400mm,r2=1200mm,r3=800mm,r4=1500mm,r5=1200mm;各构件的质心为rc1=200mm,rc2=600mm,rc3=400mm,rc5=600mm;质量为m1=1.2kg,m2=3kg,m3=2.2kg;m5=3.6kg,m6=6kg;转动惯量为J1=0.016kg·m2,J2=0.25kg·m2;J3=0.09kg·m2,J5=0.45kg·m2;构件6的工作阻力F6=1000N,其他构件所受外力和外力矩均为零,构件1以等角速度10 rad/s逆时针方向回转,试求不计摩擦时,转动副A的约束反力、驱动力矩、移动副F的约束反力。
图1-1
此机构模型可以分为曲柄的动力学、RRRII级杆组的动力学和RRP II级杆组的动力学,再分别对这三个模型进行相应参数的求解。
图1-2AB构件受力模型
如上图1-2对于曲柄AB由理论力学可以列出表达式:
由运动学知识可以推得:
将上述各式合并成矩阵形式有,
(1-21)
如图1-3,对构件BC的约束反力推导如下,
图1-3 BC构件受力模型
如图1-4,对构件BC的约束反力推导如下,
图1-4CD构件受力模型
由运动学可以推导得,
将上述BC构件,CD构件各式合并成矩阵形式有,
=
(1-22)
如图1-5对构件5进行约束反力的推导如下,
图1-5CE杆件受力模型
如图1-6对滑块进行受力分析如下,
滑块受力模型
由运动学可推,
(1-23)
二 编程与仿真
利用MATLAB进行仿真分析,主要包括两个步骤:
首先是编制计算所需要的函数模块,然后利用其仿真工具箱Simulink建立仿真系统框图,设定初始参数进行仿真分析。
针对建立完成的数学模型,为了进行矩阵运算,根据以上式子编制M函数文件chengcrank.m,chengrrr.m、chengcrankdy.m、chengrrrdy.m、chengrrp.m和chengrrpdy.m如下:
曲柄原动件M函数文件chengcrank.m:
functiony=chengcrank(x)
%%Functiontocomputetheacclerationofcrank
%Input parameters
%x(1)=theta-1
%x
(2)=dtheta-1
%x(3)=ddtheta-1
%0utput parameters
%y(1)=Re[ddB]
%y
(2)=Im[ddB]
r1=0.4;
ddB=[r1*x(3)*cos(x
(1)+pi/2)+r1*x(2)^2*cos(x
(1)+pi);r1*x(3)*sin(x
(1)+pi/2)+r1*x
(2)^2*sin(x
(1)+pi)];
y=ddB;
RRRII级杆组M函数文件chengrrr.m:
functiony=chengrrr(x)
%functionto computethe accelerationfor RRRbar group
%Inputparameters
%x
(1)=theta-2
%x(2)=theta-3
%x(3)=dtheta-2
%x(4)=dtheta-3
%x(5)=Re[ddB]
%x(6)=Im[ddB]
%Outputparameters
%y(1)=ddtheta-2
%y
(2)=ddtheta-3
%y(3)=Re[ddC]
%y(4)=Im[ddC]
r2=1.2; r3=0.8;ReddD=0;ImddD=0;
a=[r2*cos(x
(1)+pi/2) -r3*cos(x
(2)+pi/2);r2*sin(x
(1)+pi/2)-r3*sin(x(2)+pi/2)];
b=[-r2*cos(x
(1)+pi) r3*cos(x
(2)+pi);
-r2*sin(x
(1)+pi) r3*sin(x
(2)+pi)]*[x(3)^2;x(4)^2]+[ReddD-x(5);ImddD-x(6)];
ddth=inv(a)*b;
y
(1)=ddth
(1);
y
(2)=ddth(2);
y(3)=x(5)+r2*ddth
(1)*cos(x(1)+pi/2)+r2*x(3)^2*cos(x(1)+pi);
y(4)=x(6)+r2*ddth
(1)*sin(x
(1)+pi/2)+r2*x(3)^2*sin(x(1)+pi);
曲柄原动件动力学M函数文件chengcrankdy.m:
function y=chengcrankdy(x)
%Function for Dyanmic analysisof crank
%%Inputparameters
%x(1)=theta-1
%x
(2)=dtheta-1
%x(3)=ddtheta-1
%x(4)=RxB
%x(5)=RyB
%%0utputparameters
%y
(1)=RxA
%y(2)=RyA
%y(3)=M1
g=9.8;%重力加速度
r1=0.4;%曲柄长度
rc1=0.2;%质心离铰链A的距离
m1=1.2;%曲柄质量
J1=0.016;%绕质心转动惯量
Fx1=0; Fy1=0; MF=0;%作用于质心的外力和外力矩
ReddA=0;ImddA=0;%铰链A的加速度
y
(1)=m1*ReddA+m1*rc1*x(3)*cos(x(1)+pi/2)+m1*rc1*x
(2)^2*cos(x(1)+pi)-Fx1+x(4);
y
(2)=m1*ImddA+m1*rc1*x(3)*sin(x(1)+pi/2)+m1*rc1*x(2)^2*sin(x
(1)+pi)-Fy1+x(5)+m1*g;
y(3)=J1*x(3)-y(1)*rc1*sin(x
(1))+y(2)*rc1*cos(x
(1))-x(4)*(r1-rc1)*sin(x
(1))+x(5)*(r1-rc1)*cos(x
(1))-MF;
RRRII级杆组动力学M函数文件chengrrrdy.m:
functiony=chengrrrdy(x)
%FunctionforDyanmicanalysisofRRR dayardgroup
%Inputparameters
%x
(1)=theta-2
%x
(2)=theta-3
%x(3)=dtheta-2
%x(4)=dtheta-3
%x(5)=ddtheta-2
%x(6)=ddtheta-3
%x(7)=Re[ddB]
%x(8)=Im[ddB]
%x(9)=Fx3
%x(10)=Fy3
%x(11)=M3
%0utputparameters
%y
(1)=RxB
%Y
(2)=RyB
%y(3)=RxC
%y(4)=RyC
%y(5)=RxD
%y(6)=RyD
g=9.8;%重力加速度
r2=1.2; r3=0.8;%两杆的长度
rc2=0.6;rc3=0.4;%质心到铰链B的距离 %质心到铰链D的距离
m2=3;m3=2.2;%两杆的质量
J2=0.25;J3=0.09;%两杆的转动惯量
ReddD=0;ImddD=0;
Fx2=0; Fy2=0;
M2=0;%2杆的外力和外力矩
a=zeros(6);
a(1,1)=1;
a(1,3)=1;
a(2,2)=1;
a(2,4)=1;
a(3,1)=rc2*sin(x
(1));
a(3,2)=-rc2*cos(x
(1));
a(3,3)=-(r2-rc2)*sin(x
(1));
a(3,4)=(r2-rc2)*cos(x
(1));
a(4,3)=-1;
a(4,5)=1;
a(5,4)=-1;
a(5,6)=1;
a(6,3)=(r3-rc3)*sin(x
(2));
a(6,4)=-(r3-rc3)*cos(x
(2));
a(6,5)=rc3*sin(x(2));
a(6,6)=-rc3*cos(x
(2));
b=zeros(6,1);
b(1,1)=m2*rc2*x(5)*cos(x
(1)+pi/2)+m2*x(7)+m2*rc2*x(3)^2*cos(x(1)+pi)-Fx2;
b(2,1)=m2*rc2*x(5)*sin(x
(1)+pi/2)+m2*x(8)+m2*rc2*x(3)^2*sin(x
(1)+pi)-Fy2+m2*g;
b(3,1)=J2*x(5)-M2;
b(4,1)=m3*rc3*x(6)*cos(x
(2)+pi/2)+m3*ReddD+m3*rc3*x(4)^2*cos(x
(2)+pi)-x(9);
b(5,1)=m3*rc3*x(6)*sin(x
(2)+pi/2)+m3*ImddD+m3*rc3*x(4)^2*sin(x
(2)+pi)-x(10)+m3*g;
b(6,1)=J3*x(6)-x(11);
y=inv(a)*b;
RRPII级杆组M函数文件:
functiony=chengrrp(x)
%functionto computetheaccelerationforRRPbargroup
%Inputparameters
%x
(1)=theta-5
%x
(2)=dtheta-5
%x(3)=Re[ddC]
%x(4)=Im[ddC]
%x(5)=ds
%Outputparameters
%y(1)=ddtheta-5
%y(2)=dds
r5=1.2;th6=0; ReddD=0; ImddD=0;
a=[r5*cos(x
(1)+pi/2) -cos(th6);r5*sin(x
(1)+pi/2) -sin(th6)];
b=[-r5*cos(x(1)+pi) 0;-r5*sin(x(1)+pi)0]*[x
(2)^2;x(5)]+[ReddD-x(3);ImddD-x(4)];
y=inv(a)*b;
RRPII级杆组动力学M函数文件:
functiony=chengrrpdy(x)
%FunctionforDyanm5canalysisofRRPdayardgroup
%Inputparameters
%x
(1)=theta-5
%x(2)=dtheta-5
%x(3)=ddtheta-5
%x(4)=dds-6
%x(5)=Re[ddC]
%x(6)=Im[ddC]
%0utputparameters
%y
(1)=RxC
%Y
(2)=RyC
%y(3)=RxE
%y(4)=RyE
%y(5)=RF%移动副的约束反力
g=9.8;%重力加速度
r5=1.2;%杆的长度
rc5=0.6; %质心到铰链B的距离
m5=3.6;m6=6;%杆、块的质量
J5=0.45;
Fx5=0;Fy5=0;
Fx6=1000;Fy6=0;
M5=0;
th6=0;
a=zeros(5);
a(1,1)=1;
a(1,3)=1;
a(2,2)=1;
a(2,4)=1;
a(3,1)=rc5*sin(x
(1));
a(3,2)=-rc5*cos(x
(1));
a(3,3)=-(r5-rc5)*sin(x
(1));
a(3,4)=(r5-rc5)*cos(x
(1));
a(4,3)=-1;
a(4,5)=-sin(th6);
a(5,4)=-1;
a(5,5)=cos(th6);
b=zeros(5,1);
b(1,1)=m5*x(5)+m5*rc5*x(3)*cos(x
(1)+pi/2)+m5*rc5*x
(2)^2*cos(x(1)+pi)-Fx5;
b(2,1)=m5*x(6)+m5*rc5*x(3)*sin(x(1)+pi/2)+m5*rc5*x
(2)^2*sin(x(1)+pi)-Fy5+m5*g;
b(3,1)=J5*x(3)-M5;
b(4,1)=m6*x(4)*cos(th6)-Fx6;
b(5,1)=m6*x(4)*sin(th6)-Fx6+m6*g;
y=inv(a)*b;
三系统仿真框图
进入MATLAB,在命令栏中键入Simulink进入仿真界面,根据信息传递的逻辑关系,建立仿真系统框图如图3-1.然后设定各环节的初始参数,即可以对机构进行运动学仿真分析,再利用MATLAB的plot命令根据需要绘制曲线。
图3-1
四仿真的实现
再设计完成仿真框图之后,为了进行仿真还必须设定初始参数值。
连杆机构杆长已经在simulink框图中给定,如果设定
初始夹角为62
=10 rad/s,曲柄1作匀速转动(即
),接下来要确定杆2,3的角位移和角速度,杆5的角位移和角速度,滑块的速度。
可以利用辛普森方法(在MATLAB命令框中输入M函数为rrrposi)求得
=0.3612rad/s,
=1.8101rad/s,再利用MATLAB(在命令框输入rrrvel)求出W2=-2.2345,W3=3.3250,再利用杆3的角位移和角速度、杆5的角位移求得(在MATLAB命令框中输入M函数为compvel)W5=0.6962,ds=-3.1323。
对仿真框图中各积分器设定参数变量x并在matlab命令框输入变量x=[62*pi/18010 0.3612 1.8101-2.2345 3.3250-41*pi/1800.6962-3.1323];其中初始数值分别对应:
theta-1、omega-1、theta-2、omega-2、omega-3、theta-5,omega-5ds,以及仿真时间为1s,后进行仿真,利用MATLAB中的plot绘图命令把角速度曲线分别绘制出来。
在MATLAB命令中键入:
plot(tout,simout(:
1)),plot(tout,simout(:
2)),plot(tout,simout(:
,3)),plot(tout,simout(:
4)),plot(tout,simout2(:
5)),即可得到点A的水平方向、垂直方向的约束反力、驱动力矩M1及其所作功W1的变化曲线,如图所示。
转动副A水平方向力 转动副A垂直方向力
曲柄上作用的力矩M1 曲柄力矩所做的功W1
移动副F的约束反力
 升级会员
升级会员 