冷机群控控制方案(修).doc
《冷机群控控制方案(修).doc》由会员分享,可在线阅读,更多相关《冷机群控控制方案(修).doc(6页珍藏版)》请在冰豆网上搜索。
前言
晋江机场中央空调主要设备统计:
1台1000千瓦水冷螺杆式冷水机组CH-B1-01;2台2000千瓦水冷离心式冷水机CH-B1-02~03;
2台158.4立方冷冻泵CHWP-B1-01~02;
2台316.8立方冷冻泵CHWP-B1-03~04;
6台冷却泵CWP1-B1-1~6;
5台冷却塔CT-B1-1~5;
1台总集水器;1台总分水器;
一.冷水机组群控方案说明
根据主设备参数,将上述设备分成如下几个控制搭配组:
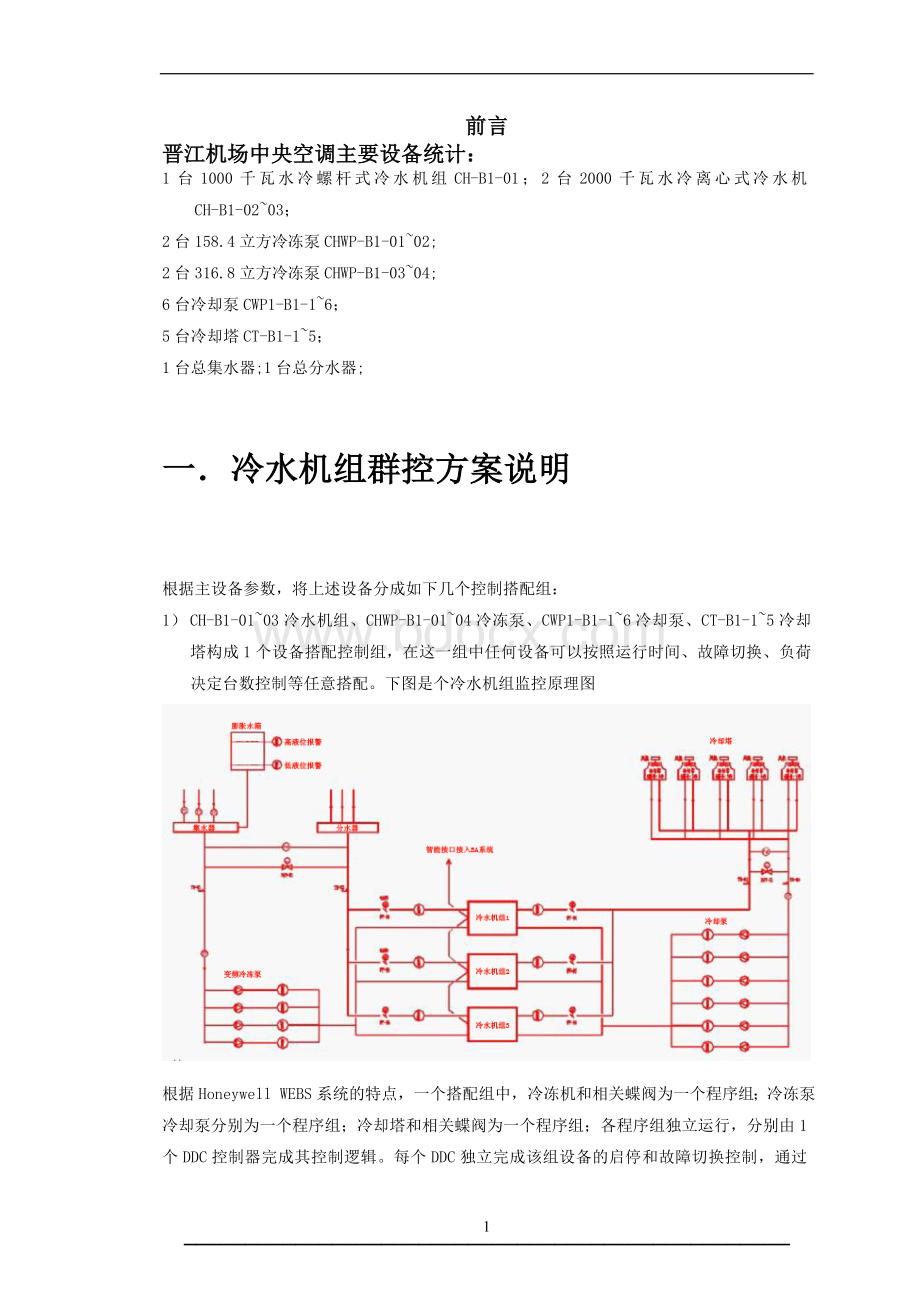
1)CH-B1-01~03冷水机组、CHWP-B1-01~04冷冻泵、CWP1-B1-1~6冷却泵、CT-B1-1~5冷却塔构成1个设备搭配控制组,在这一组中任何设备可以按照运行时间、故障切换、负荷决定台数控制等任意搭配。
下图是个冷水机组监控原理图
冷却泵CWP1-1-7
冷却泵CWP1-1-6
冷却泵CWP1-1-1
根据HoneywellWEBS系统的特点,一个搭配组中,冷冻机和相关蝶阀为一个程序组;冷冻泵冷却泵分别为一个程序组;冷却塔和相关蝶阀为一个程序组;各程序组独立运行,分别由1个DDC控制器完成其控制逻辑。
每个DDC独立完成该组设备的启停和故障切换控制,通过lonworks总线进行DDC之间点对点的数据交换,以实现启停过程的顺序控制和负荷控制。
2)冷却塔控制
第一,开机顺序:
(延迟时间为5~300秒可调)
开冷却阀-开冷却塔阀-开冷却泵-开冷却塔风机-开冷冻阀-开冷冻泵-开冷水机组
第二,关机顺序:
(延迟时间为5~300秒可调)
关冷水机组-关冷冻泵-关冷冻阀-关冷却塔风机-关冷却泵-关冷却塔阀-关冷却阀
从上述冷源系统控制流程可见,冷却塔是冷却水系统中最后启动的一个设备,故冷却塔启动的前提条件是在冷却阀、冷却塔阀和冷却泵均已经正常启动运行,并且冷却水回水温度达到了设定值。
(冷却水回水温度预设定:
下限是27°C,上限时32°C;设定值可以在用户界面上根据用户实际需要直接修改。
)
a)运行时间比较
每台冷却塔都有运行时间累计,根据冷却塔累计的运行时间,程序自动寻找运行时间最少的冷却塔并启动该设备开机子程序。
当任一冷却塔一旦启动后,设备根据累计运行时间排序的程序立即锁定,不再执行时间排序,避免多个设备累计运行时间相近而导致频繁启动设备。
每次执行设备时间累计计算是在任一台同类设备未启动前至任一台设备启动为止。
b)启动失败自动切换
每台冷却塔都有一个开机、关机子程序,该程序会自动监测设备故障、手自动状态,在冷却塔都在没有故障并且自动状态下,才可发出开机命令。
如果冷却塔开机命令发出后,30S后没有得到状态反馈系统认为该主设备故障(启动失败)。
发出报警信息并退出该设备开机子程序、启动该设备关机子程序及下一台同类设备开机子程序。
c)设备故障自动切换
每台冷却塔都有一个开机、关机子程序,该程序会自动监测设备故障、手自动状态,在设备都在没有故障并且自动状态下,才可发出开机命令。
如果在启动前或者在运行过程中检测到设备突然发生故障而状态反馈消失,系统则认为主设备故障,将立即发出报警信息并退出该设备开机子程序、启动该设备关机子程序及下一台同类设备开机子程序。
d)冷却塔风机启停控制:
根据冷却塔出水温度和冷水机组运行状态两个条件进行冷却塔风机启停控制。
启动冷却塔风机的前提条件是冷水机组在运行,且冷却水回水温度大于27°C时,启动累计时间最少的冷却塔风机,先开两台冷却塔风机;当冷却水回水温度大于30°C,则再增开两台冷却塔风机;当冷却水回水温度大于32°C,则再增加一台冷却塔风机。
当冷却水回水温度小于31°C,则再关闭一台冷却塔风机;当冷却水回水温度小于29°C,则再关闭两台冷却塔风机;当冷却水回水温度小于26°C,则再关闭两台冷却塔风机。
3)冷却泵控制
根据项目情况,冷却泵有6台,采取的控制方法是四用两备。
在冷却回水总管设置2个流量计,根据冷却水泵供回水水管温度及总管水流量平均值算出冷却负荷,假如运行台数是n(n>=4)台,当负荷大于n台设计负荷时,再增加1台冷却泵,以此类推计算。
4)冷冻泵控制
冷冻泵是变频泵,根据项目负荷情况、冷冻泵运行时间等自动选择开机台数。
冷冻泵是变频泵采取定压差控制同步变频法。
a)定压差控制同步变频法,在末端管路不利位置设置3个压差测点,在集水器管设置3台流量计。
所有变频泵的频率由一个压差调节PID回路来控制,读取3个压差测点,低选其输出作为PID回路的PV值,目的保证系统中最不利环节的压差需求。
比较PV与PID回路的SP值,压差设定点不应小于80Kpa。
当PV>SP,说明系统压差偏小,由PID增加输出使变频器频率提高,反之PID降低输出使频率降低。
当频率输出达到工频并维持若干分钟以上,程序自动添加1台泵的投入,以此类推投入更多的泵。
运行台数是n(n>=2)台,当流量小于n-1台泵的设计流量的90%并维持若干分钟,程序退出1台泵的运行。
所有投入的冷冻泵都由同一个PID回路控制其频率,因此属于同步变频。
该方法也是目前常用的冷冻泵系统控制方案。
5)冷水机组控制
根据主机参数,群控负荷启停设立如下台数控制设定点并且操作人员通过操作界面可以对设定值进行修改:
群控系统启动后首先运行大机组,15分钟以后开始进行负荷计算。
下面是负荷控制设定点。
负荷<95%*1000千瓦,延时10分钟后,只开1000千瓦主机一台
95%*1000千瓦<负荷<95%*2000千瓦,延时10分钟后,只开1台2000千瓦主机
95%*2000千瓦<负荷<95%*3000千瓦,延时10分钟后,只开1台1000千瓦主机和1台2000千瓦主机
95%*负荷3000千瓦<负荷<95%*4000千瓦,延时10分钟后,只开2台2000千瓦主机
95%*负荷4000千瓦<负荷<95%*5000千瓦,延时10分钟后,只开2台2000千瓦主机和1台1000千瓦主机
假如运行台数是n(n>=2)台,当负荷小于n-1台设计负荷时,延时10分钟,卸载1台主机。
二.冷水机组群控算法说明
1.冷水机组群控四个主要控制算法逻辑
1)顺序启停控制
开机:
开冷却阀-开冷却塔阀-开冷却泵-开冷却塔风机-开冷冻阀-开冷冻泵-开冷水机组
关机:
关冷水机组-关冷冻泵-关冷冻阀-关冷却塔风机-关冷却泵-关冷却塔阀-关冷却阀
2)运行时间比较
每台主设备都有运行时间累计,根据各主设备累计的运行时间,程序自动寻找运行时间最少的设备并启动该设备开机子程序。
3)故障自动切换
每台主设备都有一个开机、关机子程序,该程序会自动监测设备故障、手自动状态,在设备都在没有故障并且自动状态下,才可发出开机命令。
如果主设备开机命令发出后,30S后没有得到状态反馈系统认为该主设备故障(启动失败)。
发出报警信息并退出该设备开机子程序、启动该设备关机子程序及下一台同类设备开机子程序。
如果运行过程中,设备突然发生故障而状态反馈消失,系统则认为主设备故障,将立即发出报警信息并退出该设备开机子程序、启动该设备关机子程序及下一台同类设备开机子程序。
4)负荷控制
根据送回水总管温度及回水总管流量,计算建筑物实际负荷kw,假如kw>单台冷水机组设计冷量,程序认为冷量不够,增加一台冷水机组投入。
以此类推投入更多的冷水机组。
2.冷水机组群控算法关键
1)搭配判断程序
该系统共有4种类型主设备,冷水机组、冷却泵、冷冻泵、冷却塔,按其水系统结构,他们之可任意搭配而非一一对应关系,如任何一台冷水机组可以和任何一台冷却泵、冷冻泵及冷却塔搭配。
搭配判断程序按照最小运行时间、故障判别原则和负荷计算完成主设备之间的搭配。
每台主设备都有一个启动和关机子程序,子程序执行完全由搭配判断程序控制。
假如冷水机组、冷冻泵、冷却塔、冷却泵编号分别为A、B、C、D,群控启动命令发出后搭配判断程序自动找出A(Tmin)、B(Tmin)、C(Tmin)、D(Tmin)设备(Tmin为运行时间最少设备),然后按照预定顺序分别激活其子程序D-C-B-A。
PID调节
P比例(P)控制
比例控制是一种最简单的控制方式。
其控制器的输出与输入误差信号成比例关系。
当仅有比例控制时系统输出存在稳态误差(Steady-stateerror)。
采样期(samplePeriod:
):
输出值不会改变直到当前采样周期结束下一个采样开始。
当只有比例作用,I=D=0(作为对置的积分,微分常只是使用在采样周期的误差的一部分。
输出值=P+I+D+DB=P+DB
比例值设置过小:
比例设定值输入改变一点,都可以使得输出值从0~100%往复循环,形成摆震。
比例值设置过大:
导致偏差变大,比例设定值改变很多,输出值才改变一点,使得变频器反应变慢。
积分(I)控制
在积分控制中,控制器的输出与输入误差信号的积分成正比关系。
如果在进入稳态后存在稳态误差,则称这个控制系统是有稳态误差的或简称有差系统(SystemwithSteady-stateError,Error=[(Input-SetPoint)/10]*100)。
为了消除稳态误差,在控制器中必须引入“积分项”。
积分项对误差取决于时间的积分,随着时间的增加,积分项会增大。
这样,即便误差很小,积分项也会随着时间的增加而加大,它推动控制器的输出增大使稳态误差进一步减小,直到等于零。
因此,比例(P)+积分(I),可以使系统在进入稳态后无稳态误差。
I=积分作用
S=采样周期
P=总周期
P=I*S
每个采样周期里的输出值的改变=(1/I)/Error
微分(D)控制
在微分控制中,控制器的输出与输入误差信号的微分(即误差的变化率)成正比关系。
在克服误差的调节过程中可能会出现振荡甚至失稳。
其原因是由于存在有较大惯性组件(环节)或有滞后(delay)组件,具有抑制误差的作用,其变化总是落后于误差的变化。
解决的办法是使抑制误差的作用的变化“超前”,即在误差接近零时,抑制误差的作用就应该是零。
这就是说,在控制器中仅引入“比例”项往往是不够的,比例项的作用仅是放大误差的幅值,而目前需要增加的是“微分项”,它能预测误差变化的趋势,这样,具有比例+微分的控制器,就能够提前使抑制误差的控制作用等于零,甚至为负值,从而避免了被控量的严重超调。
所以对有较大惯性或滞后的被控对象,比例(P)+积分(I)+微分(D)能改善系统在调节过程中的动态特性。
PID控制器的参数整定
对于压差控制PID回路,一般采用PI调节。
由于压差是一个响应比较快的测量参数,预设一个经验值,比例带=50,积分时间=0.5分,改变设定值,人为给出一个扰动,观察压差参数的过渡过程曲线衰减比,根据曲线变化不断修正PI值,反复该过程,直至衰减比接近1/4位置。
6
_________________________________________________
 升级会员
升级会员 