基于st89c52单片机的自动往返小车含程序学士学位论文.docx
《基于st89c52单片机的自动往返小车含程序学士学位论文.docx》由会员分享,可在线阅读,更多相关《基于st89c52单片机的自动往返小车含程序学士学位论文.docx(24页珍藏版)》请在冰豆网上搜索。
基于st89c52单片机的自动往返小车含程序学士学位论文
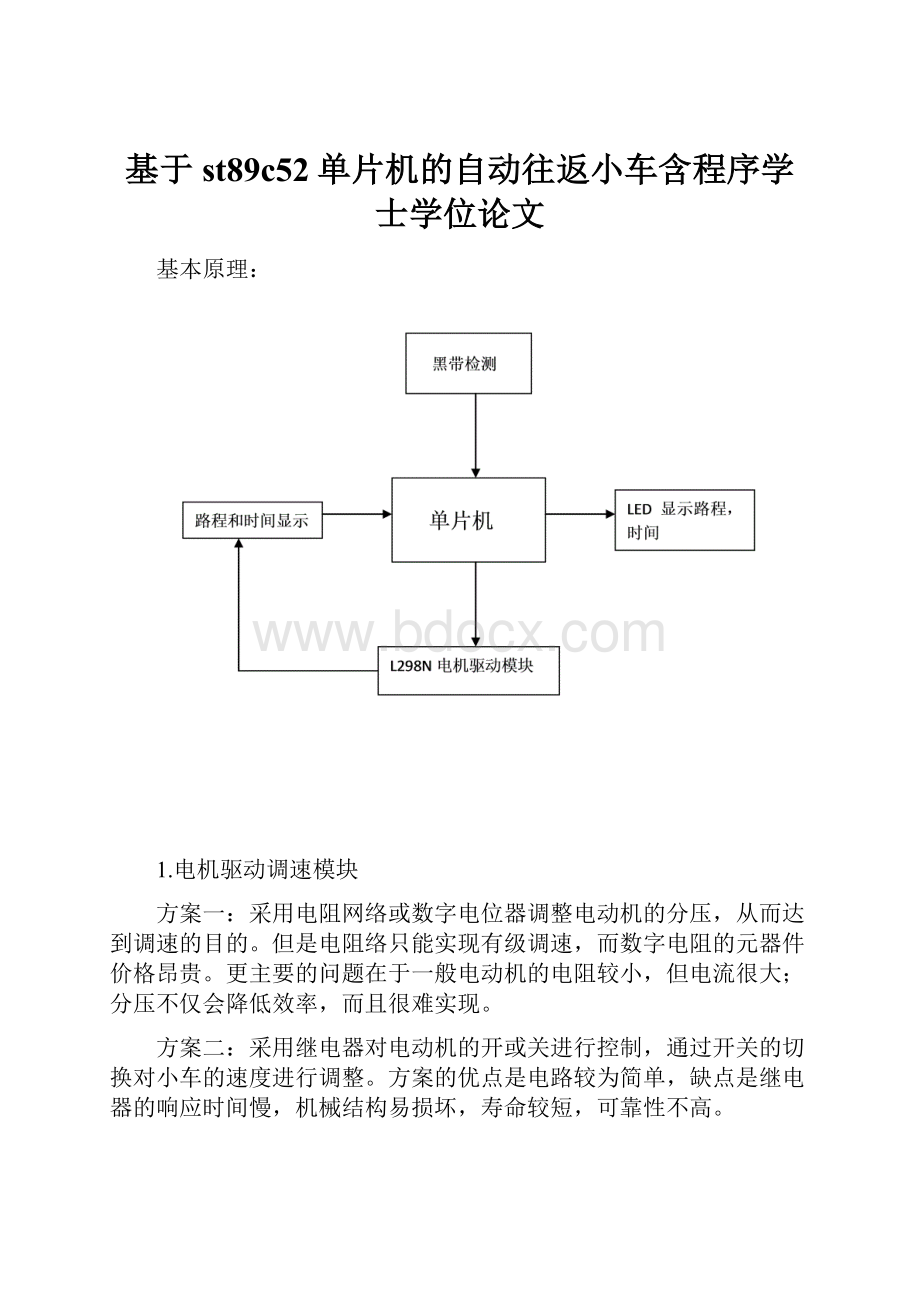
基本原理:
1.电机驱动调速模块
方案一:
采用电阻网络或数字电位器调整电动机的分压,从而达到调速的目的。
但是电阻络只能实现有级调速,而数字电阻的元器件价格昂贵。
更主要的问题在于一般电动机的电阻较小,但电流很大;分压不仅会降低效率,而且很难实现。
方案二:
采用继电器对电动机的开或关进行控制,通过开关的切换对小车的速度进行调整。
方案的优点是电路较为简单,缺点是继电器的响应时间慢,机械结构易损坏,寿命较短,可靠性不高。
方案三:
采用达林顿管TIP4组成的PWM电路。
用单片机控制达林顿管使之工作在占空比可调的状态,精确调整电机转速。
方案四:
采用L298N来控制电机的正转和反转来实现小车的前进和后退。
加上单片机的程序PWM,实现整车的加速与减速,精确小车的速度。
基于上述理论分析,拟选择方案四。
2.路面黑带检测模块
黑带检测的原理是:
红外光线照射到路面并反射,由于黑带和白纸的系数不同,可根据接的红外线的强弱判断是否到达黑带。
方案一:
可见光发光二极管与光敏二极管组成的发射—接收电路。
这种方案的缺点在于其他环境光源会对光敏二极管的工作产生很大的干扰,一旦外界光亮条件改变,很可能造成误判和漏判;虽然产生超高亮发光二极管可以降低一定的干扰,但这又将增加额外的功率损耗。
方案二:
反射式的红外发射—接收器。
由于采用红外管代替普通可见光管,可以降低环境干扰。
基于上述理论分析,拟选择方案二。
3.电源选择
方案一:
所有器件采用电源供电,这样供电电路比较简单;但是由于电动机启动瞬时电流很大,会造成电压不稳,干扰严重,缺点十分明显。
方案二:
双电源供电,将电动机驱动电源与单片机以及周边电路电源完全隔离,这样做虽然不如单电源方便灵活,但可以将电动机驱动所造成的干扰彻底消除,提高了系统的稳定性。
基于上述理论分析,拟选择方案二。
4.控制单元模块
方案一:
采用纯数字电路
该方案外部检测采用光电转换,系统控制部分采用数字电路译码对小车电动机两端电压调整,来控制小车的运行。
时间和行程用加法器进行计数。
此系统的设计将会使电路过于复杂,调试时需要改变硬件电路,机动性差。
方案二:
用单片机控制
用光电检测不同的信号,并经单片机对其处理,传送给L298信号,使其控制电机的正转和反转,配合PWM程序控制,来实现加速减速和刹车。
通过单片机内部定数器/计数器进行定时、计数,在用单片机串行输入/输出口进行显示控制。
此方案电路成熟、工作稳定、容易实现控制。
为能更好的实现题目的各种设计要求,所以我们选用第二种方案。
用单片机进行控制。
其工作框图如下:
光电检测
小车正反转
控制中心
STC89C52
开始
行驶时间显示
霍尔检测
二电路设计
行驶里程显示
1.光电检测部分:
我们采用反射式光电检测电路对跑道上的黑线进行检测,并用两个遮光套管套住发光管和接收管以一定的角度紧贴跑道,这样可以消除外界光线的干扰。
为了加强可靠性采用槽型光耦检测轮子转动的行程。
用LM358电压比较器输出高低电平检测信号。
如图所示:
2.STC89C52单片机基本系统
此系统以89C52为核心,每检测到一个黑带由光电检测部分产生一个的脉冲,使单片机产生一个外部中断1,定义检测黑带数的变量加1,同时车轮每转一圈,霍尔元件输出一个脉冲,是安单片机产生一个外部中断0,定义圈数的变量加1.通过P3.0和P3.1控制L298来控制电机的正转与反转及刹车。
当P3.0输出低电平,P3.1输出高电平时,电机正转,相反则电机反转,当P3.0和P3.1都是低电平时,使电动机被短路,提高了刹车效率,基本杜绝了由于制动惯性造成的小车的前冲现象。
通过P0口进行两个数码管的位选,P2口进行段码输出,其中一个数码管显示行驶时间,另外一个数码管显示行驶路程。
如图所示:
3.L298N电动机驱动模块部分
该电路采用电动机驱动芯片L298来控制电动机的正转与反转,加以第二路电机电
源保证了电动机启动时有足够的电流。
在试验中控制电压为单片机输出的高低电
平直接控制。
具体电路图连接如下:
4.电源部分
由于电动机工作电流大,需要选用内阻小,供电电流强,质量轻,可反复使用的经济型电池,我们选用镍铬可充电电池组。
为使单片机工作稳定,避免电动机开关机和其转动时对其电源的影响,在此用两个电池组和稳压块7805分别为89C52和电动机驱动显示部分分别进行供电。
保证小车工作和显示的稳定性。
5.软件设计部分
单片机控制电路主要由一片STC89C52组成,通过P3口控制小车正转与反转,刹车,加速减速,通过两个四联数码管控制显示时间和里程以及小车行驶的时间。
其中P0口进行位选,P2口进行显示段码输出。
该系统采用上电复位加上手动复位联合复位系统进行初始化,单片机通过P3.0,P3.1输出脉冲控制电机正转反转以及刹车,当P3.0,P3.1分别输出01是电动机正转,输出10时电动机反转,输出00时电动机两边短路,小车立即刹车。
流程图如下:
(1)外部中断0
车轮美转一次,霍尔元件产生一个脉冲P3.14,通过下降沿触发外部中断0,并且在每进行一次外部中断记录圈数的变量加1.
车轮每转一圈
霍尔元件产生一个脉冲
圈数quanshu++
开始
(2)外中断1
光电检测每检测到一条黑带就产生一个脉冲输入P3.2口,通过下降沿的方式触发外中断1,每中断一次记录黑带的变量加1,当检测到第五条黑带时,p1.0=1,p1.1=1,小车的电动机由于短路刹车,当检测到第九条黑带时,小车再次刹车同时关掉所有中断。
(3)定时器中断0
使用定时器T0产生5ms定时中断,每次执行该中断前要先给定时器0赋初值,定时器中断每执行一次,变量加1。
当i=200时,即每当计时1秒时,时间变量t加1,速度等于一秒转的圈数和小车车轮的周长相乘。
开始
产生5ms中断
控制一秒定时,i++
一秒定时是否到
共转的圈数q
路程=周长*圈数q
(4)定时器中断1
主要用来产生不同的占空比的波型进行高低速控制,每次执行时,定时器1要赋初值
(5)主程序
主程序主要用来控制两个四联数码管的显示,通过循环语句不断的调用显示程序,使两个四联数码管按位不断循环亮点,当小车行驶时动态显示时间和路程,小车停止时显示小车行驶过程中的时间和路程。
6.安装与调试
自动小车为玩具遥控小汽车的改装品,在改装的过程中最重要的是考虑设计光电检测管的位置,检测黑带的光电管放在车体的中央,用遮光管将其以一定反射角度压到跑道上。
路程检测用槽型光耦,放在小车的从动轮上。
轮子的周长约为21.6厘米,在轮子上用了一个霍尔元件,每转一圈一个脉冲。
在组装前对每一个单元电路进行测试,以保证外部硬件电路的无误,有利于最后的统调。
调整是以点到线,最后到整体调试的方法。
在调整的过程中我们发现了许多问题,如响应中断的次数的调整等。
并且为了小车碰到墙壁不至于停车,我们在小车的四角上都加上了导向轮,导向轮用随身听的压带轮制作即可。
7.附录元器件及程序如下:
基本元器件列表
一个STC89C52单片机
2个四位共阳数码管
一个L298N芯片
一个LM358
一个霍尔元件和小磁钢片
光点接收管一对
晶振(12M)及30pf电容
开关
电阻10k100欧姆1k20k可调
附录程序:
#include//包含头文件
#defineuintunsignedint//宏常量定义
#defineucharunsignedchar//宏常量定义
sbitdianji1=P1^0;//P1_0设置为电机控制一
sbitdianji2=P1^1;//P1_1设置为电机控制二
sbithdjc=P3^2;//P3_2设置为黑带检测位
ucharcodeduma[]={0xc0,0xf9,0xa4,0xb0,0x99,0x92,0x82,0xf8,0x80,0x90,0xff};//段编码
ucharcodedianduma[]={0x40,0x79,0x24,0x30,0x19,0x12,0x02,0x78,0x00,0x10};//带小数点段编码
ucharcodewema[]={0x01,0x02,0x04,0x08,0x10,0x20,0x40,0x80,0x00,0xff};//位编码
ucharnum,ge,shi,bai,qian;//定义几个字符型变量
uintmiao,lc,heidai=0;//定义几个整形变量
longintqs;//定义一个长整形变量用来记录小车所转的圈数
voidfenwei(uint);//声明一个分位函数用来把要显示的数分位
voidshuma(uchar,uchar);//声明一个数码上显示函数用来在数码管上显示数据
voidshumadian(uchar,uchar);//声明另一个数码显示函数用来显示带小数点的数据
voidmiaoxianshi(uint);//声明一个显示时间的函数
voidlcxs(uint);//声明一个显示路程的函数
voiddjkz();//声明一个电机控制函数
voiddelay(uchar);//声明一个延时函数
voiddelay10s();//声明另一个延时函数用来延时十秒钟
/*————————————————主函数———————————————————*/
voidmain()
{
EA=1;//打开总中断
ET0=1;//打开定时器中断0
EX0=1;//打开外部中断1
IT0=1;//外部中断0设置为跳变沿触发方式
EX1=1;//打开外部中断1
IT1=1;//外部中断1设置为跳变沿触发方式
TMOD=0x01;//设置定时器0为方式1
TH0=(65536-500)/256;//定时器0高八位装初值
TL0=(65536-500)%256;//定时器0低八位装初值
TR0=1;//打开定时器0
while
(1)//进入主循环
{
djkz();//进入电机控制函数
}
}
/*————————————————显示分位———————————————————*/
//函数功能:
把需要在数码管上显示的数据分位,
//即把数据的个、十、百、千位分别分
//离出来
//函数入口参数:
整形x,储存需要分位的数据
//函数返回值:
无
voidfenwei(uintx)
{
ge=x%10;
shi=(x%100)/10;
bai=(x%1000)/100;
qian=x/1000;
}
/*————————————————数码显示———————————————————*/
//函数功能:
将需要显示的数据显示在数码管上
//函数入口参数:
字符型x,储存显示数据
//字符型y,储存要显示的位置
//函数返回值:
无
voidshuma(ucharx,uchary)
{
P0=wema[8];
P2=duma[x];
P0=wema[y];
delay(5);
}
/*————————————————带小数点数码显示———————————————————*/
//函数功能:
将需要显示的数据显示在数码管上
//函数入口参数:
字符型x,储存显示数据
//字符型y,储存要显示的位置
//函数返回值:
无
voidshumadian(ucharx,uchary)
{
P0=wema[8];
P2=dianduma[x];
P0=wema[y];
delay(5);
}
/*————————————————时间显示———————————————————*/
//函数功能:
将定时器0输出的时间显示在数码管上
//函数入口参数:
整型x,要显示的时间
//函数返回值:
无
voidmiaoxianshi(uintx)
{
fenwei(x);
shuma(ge,3);
shuma(shi,2);
shumadian(bai,1);
shuma(qian,0);
}
/*————————————————路程显示———————————————————*/
//函数功能:
将外部中断1输出的路程显示在数码
//管上
//函数入口参数:
整形z:
要显示的路程
//函数返回值:
无
voidlcxs(uintz)
{
fenwei(z);
shuma(ge,7);
shuma(shi,6);
shumadian(bai,5);
shuma(qian,4);
}
/*————————————————电机控制———————————————————*/
//函数功能:
控制电机运转
//函数入口参数:
无
//函数返回值:
无
voiddjkz()
{
ucharn=20,m=60;
switch(heidai)
{
case0:
case1:
case2:
dianji1=1;
dianji2=0;
miaoxianshi(miao);
lcxs(lc);
break;
case3:
while(m--)
{
dianji1=0;
dianji2=1;
delay(70);
dianji1=0;
dianji2=0;
delay(30);
miaoxianshi(miao);
lcxs(lc);
}
while(heidai==3)
{
dianji1=1;
dianji2=0;
delay(13);
dianji1=0;
dianji2=0;
delay
(1);
miaoxianshi(miao);
lcxs(lc);
}
break;
case4:
while(heidai==4)
{
dianji1=1;
dianji2=0;
delay(25);
dianji1=0;
dianji2=0;
delay
(1);
miaoxianshi(miao);
lcxs(lc);
}
break;
case5:
while(n--)
{
dianji1=0;
dianji2=1;
delay(50);
dianji1=0;
dianji2=0;
delay(50);
miaoxianshi(miao);
lcxs(lc);
}
dianji1=1;
dianji2=1;
delay10s();
while(heidai==5)
{
dianji1=0;
dianji2=1;
}
break;
case6:
dianji1=0;
dianji2=1;
miaoxianshi(miao);
lcxs(lc);
break;
case7:
while(n--)
{
dianji1=1;
dianji2=0;
delay(50);
dianji1=0;
dianji2=0;
delay(50);
miaoxianshi(miao);
lcxs(lc);
}
while(heidai==7)
{
dianji1=0;
dianji2=1;
delay(90);
dianji1=0;
dianji2=0;
delay
(1);
miaoxianshi(miao);
lcxs(lc);
}
break;
case8:
dianji1=0;
dianji2=1;
miaoxianshi(miao);
lcxs(lc);
break;
case9:
while(n--)
{
dianji1=1;
dianji2=0;
delay(50);
dianji1=0;
dianji2=0;
delay(50);
miaoxianshi(miao);
lcxs(lc);
}
dianji1=1;
dianji2=1;
TR0=0;
while
(1)
{
miaoxianshi(miao);
lcxs(lc);
}
break;
default:
break;
}
}
/*————————————————延时函数———————————————————*/
//函数功能:
延时
//函数入口参数:
字符型x,储存延时时间的长短
//函数返回值:
无
voiddelay(ucharx)
{
uchara,b;
for(a=x;a>0;a--)
for(b=50;b>0;b--);
}
/*————————————————延时函数(延时十秒)———————————————————*/
//函数功能:
延时十秒钟
//函数入口参数:
无
//函数返回值:
无
voiddelay10s()
{
uinta,b;
for(a=15;a>0;a--)
for(b=123;b>0;b--)
{
miaoxianshi(miao);
lcxs(lc);
}
}
/*————————————————外部中断0———————————————————*/
//函数功能:
外部中断0,用来检测黑带
//函数入口参数:
无
//函数返回值:
无
voidext0()interrupt0
{
delay(50);
if(hdjc==0)
heidai++;
}
/*————————————————定时器中断0———————————————————*/
//函数功能:
定时器中断0,用来记录时间
//函数入口参数:
无
//函数返回值:
无
voidtime0()interrupt1
{
TH0=(65536-500)/256;
TL0=(65536-500)%256;
num++;
if(num==20)
{
num=0;
miao++;
}
}
/*————————————————外部中断1———————————————————*/
//函数功能:
外部中断1,记录车轮转过的圈数
//函数入口参数:
无
//函数返回值:
无
voidext1()interrupt2
{
qs++;
lc=(int)(qs*21.6);
}
 升级会员
升级会员 