电动机工作原理教案电子教案Word文档格式.docx
《电动机工作原理教案电子教案Word文档格式.docx》由会员分享,可在线阅读,更多相关《电动机工作原理教案电子教案Word文档格式.docx(12页珍藏版)》请在冰豆网上搜索。
末端
备注
第一相绕组
U1
U2
旧标记是D1、D4
第二相绕组
V1
V2
旧标记是D2、D5
第三相绕组
W1
W2
旧标记是D3、D6
通常电机三相定子绕组的首、末端都是从机座上的接线盒内引出。
图4-3是接线盒的示意图。
根据电源电压的不同,三相定子绕组可作星形或三角形联结,其接线方法如图4-4所示。
例如电源的线电压为380V,如果电动机定子的额定电压为220V,则绕组必须接成星形;
如果电动机定子的额定电压为380V,则绕组必须接成三角形。
只有这样,才能保证各相绕组在其额定电压下工作。
我国生产的三相异步电动机,凡容量在4KW及以上的,其定子绕组一般为三角形接法。
3)机座
机座通常由铸铁或铸钢制成,是整个电机的支撑部分。
为了加强散热能力,其外表面有散热筋。
2、转子
转子是电动机的旋转部分,转子由转子铁心和转子绕组组成。
1)转子铁心
转子铁心是电动机主磁通磁路的一部分。
转子铁心固定在转轴上,可绕轴转动。
与定子铁心一样,转子铁心也是由0.5mm厚的硅钢片冲压而成。
,如图4-2所示。
转子外表面分布有冲槽,槽内安放转子绕组。
2)转子绕组
转子绕组是自成闭路的短路线圈。
转子绕组不需外接电源供电,其电流是由电磁感应作用产生的。
它有两种结构形式:
笼型转子和绕线型转子。
图4-5为笼型转子示意图、图4-6为绕线型转子示意图。
(1)笼型转子
笼型转子是在铁心槽内放置铜条,铜条两端用铜制短路环焊接起来。
如图4-5(a)所示。
如果将定子铁心去掉,转子绕组的形状如图4-5(b)所示,其邢如鼠笼,故称之为笼型转子。
现在,中、小型笼型电动机的转子—般都采用铸铝转子,采用压力浇铸或离心浇铸的方法将转子槽中的导体、短路环以及端部的风扇铸造在一起,与转子铁心形成一个整体,如图4-5(c)所示。
笼型转子的优点是构造简单、价格便宜、运行安全可靠,使用方便,成为使用最广泛的一种电动机。
(2)绕线式转子
绕线式转子的绕组与定子绕组—样,也是三相对称绕组,按—定规律嵌放在转子表面的冲槽内。
转子绕组通常接成星形,其三个末端连在一起,埋设在转子内,而三个首端则连接到装在转轴一端的三个铜制滑环上。
三个滑环之间,以及它们与转轴之间都是彼此绝缘的。
滑环与固定在端盖上的电刷架内的电刷滑动接触。
三相绕组的首端就通过这种电刷、滑环结构与外部变阻器相连接,如图4-6所示。
转动可变电阻器的手柄,可调节串入每相绕组的电阻值,并可使之短路。
绕线型转子的结构比较复杂,价格也比较贵。
但是由于它的转子绕组内可以串入电阻或某种电子控制电路,使之具有较好的起动和调速特性。
一般用于对起动特性要求较高的场合,如大型机床和某些起重设备上。
笼型转子与绕线式转子只是在结构上有所不同,它们的工作原理是一样的。
为了保证转子能够自由旋转,在定子与转子之间必须留有一定的空气隙。
中小型电动机的空气隙约在0.2~1.5mm之间。
气隙的大小对异步电动机的运行有很大影响。
气隙越小,则磁路中磁阻越小,定子与转子之间的相互感应作用就越好,可以降低电机的励磁电流,提高电机的功率因数。
但是气隙过小,会对电机的装配带来困难,对定转子的同心度要求也会很高,并导致运行不可靠。
二、三相异步电动机的铭牌
每台异步电动机的机座上都钉有一块铭牌,上面标出该电动机的主要技术数据,了解铭牌上数据的意义,才能正确选择、使用和维修电动机。
1、型号三相异步电动机的型号表明了电动机的类型、用途和技术特征。
如Y系列的三相异步电动机Y180M2-4,其型号组成中各符号表示的意义如下。
2、额定功率PN表示电动机在额定工作状态下运行时,转轴上输出的机械功率。
单位是瓦(W)或千瓦(kW)。
其中UN为额定电压,IN为额定电流,cosφN为额定功率因数,ηN为额定效率。
对于额定电压380V的三相异步电动机,其cosφNηN乘积大致在0.8左右,所以根据上式,可估算出额定功率PN和额定电流IN之间的大小关系:
IN≈2PN,式中PN单位是kW,IN单位是A。
3、额定电压UN指电动机定子绕组规定使用的线电压,单位是伏(V)或千伏(kV)。
如果铭牌上有两个电压值,则表示定子绕组在两种不同接法时的线电压。
按国家标准规定,电动机的电压等级分为220V、380V、3000V、6000V和10000V。
其中3000V以上的电动机很少。
4、接法指电动机在额定电压下定子三相绕组的联结方法。
若铭牌写△,额定电压写380V,表明电动机额定电压为380V时应接△形。
若电压写成380/220V,接法写丫/△,表明电源线电压为380V时应接成丫形;
电源线电压为220V时应接△形。
我国多数地区低压电线电压为380V。
5、额定电流IN指电动机在额定情况下运行时电源输入电动机的线电流。
单位是安培(A)。
如果铭牌上标有两个电流值,表示定子绕组在两种不同接法时的线电流。
数值大的对应三角形接法,数值小的对应星形接法。
6、额定频率fN指输入电动机交流电的频率,单位是赫兹(Hz)。
我国的工业用电频率为50Hz。
7、额定转速nN表示电动机在额定运行情况下的转速,单位为转/分(r/min)。
8、绝缘等级与温升绝缘等级表示电动机所用绝缘材料的耐热等级。
温升表示电动机发热时允许升高的温度。
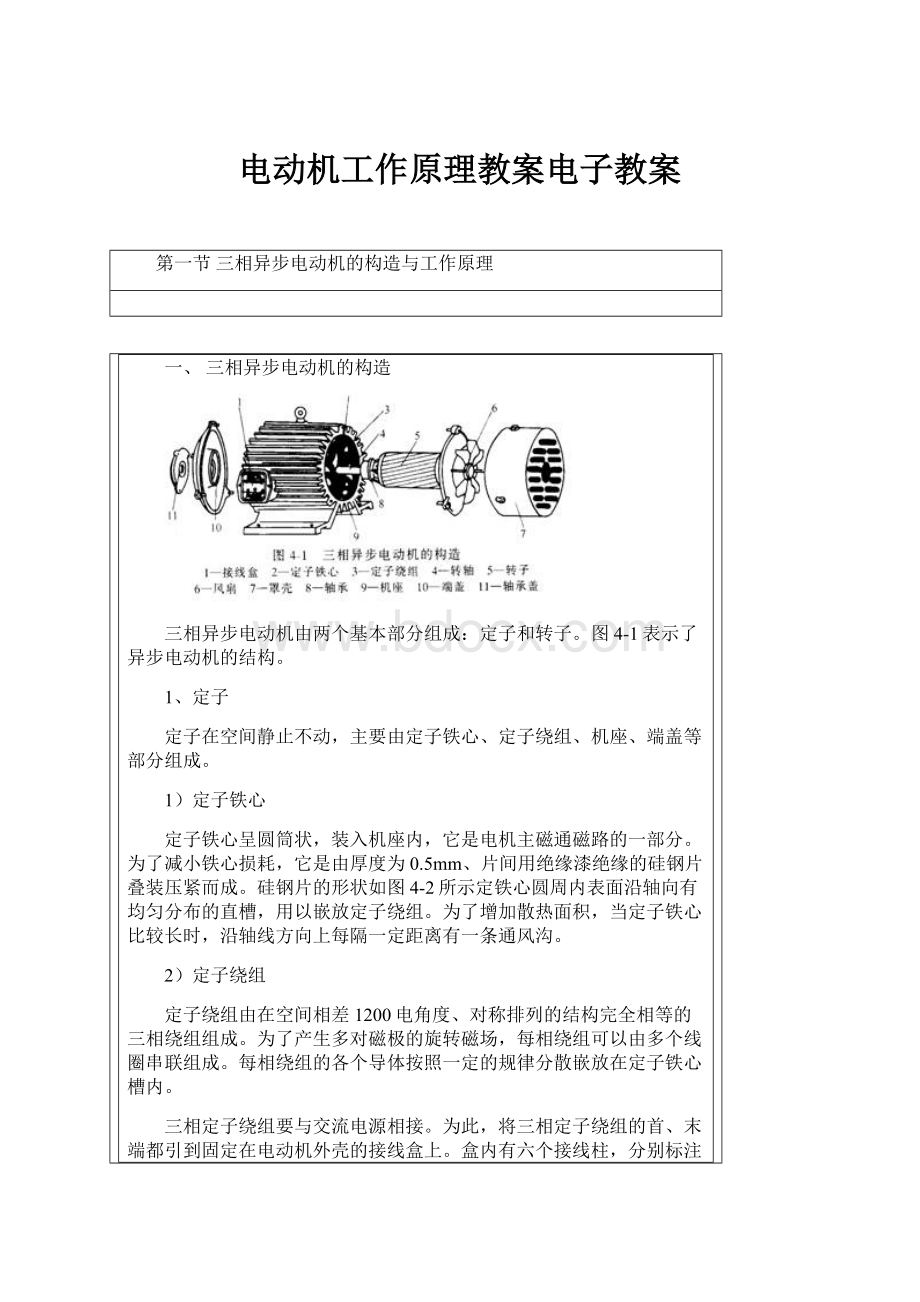
三、三相异步电动机的工作原理
三相异步电动机的工作原理是基于电磁感应的基础上的。
因此在具体讨论工作原理之前,先分析讨论三相异步电动机的旋转磁场的概念。
∙旋转磁场
在三相异步电动机中,定子三相对称绕组中通入三相对称电流,从而在电机中产生了旋转磁场。
定子三相对称绕组是三个外形、尺寸、匝数等完全相同的绕组U1U2、V1V2、W1W2,其中U1、V1、W1分别是三个绕组的首端,U2、V2、W2则分别是三个绕组的末端。
图4-7)绕组U1U2的示意图,另二相绕组的接法相同。
同时将它们对称地放置在圆筒状铁心的内表面,如图4-7b)所示,三个绕组在空间的位置差是120°
电角度。
为了简化说明单相绕组的连接方式,如图4-8所示,定子三相绕组接成星形。
为分析方便,规定每相绕组中电流的正方向都是从首端指向末端,如图4-8中所示。
现将三相绕组的首端U1、V1、W1分别接到对称三相电源上,由于三个绕组完全相同,故产生对称三相电流,电流波形如图4-9所示。
绕组流经电流,就会产生磁场。
对称三相交流电流通过三相绕组建立的合成磁场是一个什么样的磁场呢?
下面我们通过图解法进行分析。
我们选择ωt=0°
、60°
、90°
、180°
等几个瞬时,根据该瞬时各相电流的真实方向,对三相电流所产生的合成磁场进行分析、综合,并推导出该合成磁场随时间变化的规律。
首先分析ωt=0°
瞬间合成磁场的分布情况。
据电流波形图4-9知,此时iU=0,iV是负值,表明V相电流的真实方向与原假定正方向相反,是从末端V2流向首端V1,在图4-10(a)中V1端电流方向用“⊙”表示,V2端电流方向用“
”表示。
W相电流此时为正值,iW的真实方向与原假定正方向一致,是从首端W1流向末端W2。
在图4-10(a)中,W1端电流方向用“
”表示,W2端电流方向用“⊙”表示。
根据以上三相绕组中电流的真实方向,可以用右手螺旋定则判定合成磁场的方向如图4-10(a)所示。
磁力线方向由铁心内表面上方穿入、下方穿出,铁心上部相当于N极,下部是S极。
这是一个两极磁场。
磁场的轴线与U1U2绕组的空间方位一致,处于垂直位置
图4-10(b)所示是ωt=60°
瞬时的情况。
此时iU为正值,iV为负值,iW=0。
根据三相绕组中电流的真实方向可判定合成磁通的方向如图4-10(b)所示。
这时仍为一个两极磁场,但磁场轴线与W相绕组的空间方位一致。
与前一情况比较,磁场沿圆周顺时针方向转过60°
。
图4-10(c)是ωt=90°
瞬时的情况,此时iU为正值,iV、、iW均为负值。
根据三相绕组中电流的真实方向,判定合成磁通的分布亦如图示。
可见该两极磁场较ωt=0时沿圆周顺时针方向总计转过了90°
图4-10(d)所示是ωt=180°
瞬时的情况,采用同样的办法可以判定合成磁通的磁力线方向自铁心内圆周表面下方穿入、上方穿出。
铁心下部是N极、上部是S极。
可见该二极磁场轴线虽然仍与U1U2绕组空间方位重合,但较ωt=0时,已沿圆周内表面在空间总计转过了180°
通过以上几个特殊瞬时,对三相绕组合成磁场的分析,不难推断出,在三相绕组中通入的交流电流变化一个周期时,产生的合成磁场沿圆周铁心内表面的空间旋转一周。
通过分析,可知:
1、在对称三相绕组中通入对称三相电流后,所产生的合成磁场是随电流交变而在空间旋转的磁场,即为旋转磁场。
2、旋转磁场的转速——同步转速
根据以上的分析可知,对2极电机,三相电流中电流变化一个周期,其2极旋转磁场在空间旋转一周。
同样的分析方法可知,4极(p=2)电机当交流电流变化一个周期时,其4极合成磁场(p=2)将在空间转过半个圆周。
与两极旋转磁场(p=1)比较,转速减慢了一半。
依此类推,有p对磁极的异步电机,其旋转磁场的转速n1为
(4-1)
n1又称电机的同步转速,单位为转/分(rpm)。
可见,旋转磁场的转速n1与电源频率f1成正比,与磁极对数p成反比。
我国的工频f1为50Hz,若p=1,则n1=3000rpm;
若p=2,则n1=1500rpm,依次类推。
如表4-2所示。
为与异步电机转子的旋转速度相区分,旋转磁场的转速又称之为电机的同步转速。
表4-2同步转速与极对数对应表(f1=50Hz)
极对数p
1
2
3
4
5
6
同步转速n1(rpm)
3000
1500
1000
750
600
500
最后还要指出的是只要有多个绕组,它们在空间有位置差,并通入在时间上有相位差的多相电流,那么它们共同产生的合成磁场就是一个在空间旋转的旋转磁场。
3、旋转磁场的旋转方向
旋转磁场的旋转方向是由通入三相绕组的三相电流的相序决定的。
在分析2极旋转磁场时,U1U2绕组电流首先达到正最大值,其次是V1V2绕组的电流、再次是W1W2绕组的电流达到正最大值。
即定子绕组三相电流的相序是U→V→W。
这时旋转磁场的方向在空间是从U相绕组→V相绕组→W相绕组,按顺时针方向旋转。
反之,我们若改变三相绕组通电的顺序,例如将V、W相绕组与电源的连线进行对调,则此时W相绕组通以电流iV,V相绕组通以电流iW,即通入三相绕组的电流相序改变为U→W→V。
按上述方法进行分析,可以判断这时的旋转磁场是按逆时针方向旋转的。
在图4-11中只选取了ωt=0及ωt=60°
两个瞬时为例进行了分析。
表明旋转磁场在空间按逆时针方向转过了60°
改变旋转磁场的旋转方向有重要的实用意义。
因为异步电动机电动状态下转子的转向是与旋转磁场的转向相一致的。
所以工程上常采用对调两根电源线实现对异步电动机的反转控制。
2、三相异步电动机的基本工作原理
如图4-12所示,三相异步电动机定子的三相绕组通入三相对称电流,产生了旋转磁场。
旋转磁场在气隙中以同步转速n1旋转。
根据电磁感应定律,转子导体受到旋转磁场的磁力线切割,就会在导体中产生感应电动势。
根据右手定则,可判断出转子导体感应电动势的方向。
图4-15中标出顺时针方向旋转磁场以及感应电动势的方向。
需要注意的是,此时是磁极(场)在运动。
用相对运动的观点,可以认为磁极不动,转子导体沿着与磁极运动方向相反的方向运动。
根据以上分析,可以判定位于N极下的导电转子导体中产生的感应电动势的方向是离开纸面指向外面的,用“⊙”表示。
而S极下导电转子导体中感应电动势的方向是指向纸面的,用“
由于转子是一个闭合线圈,它已构成电流的闭合通路,故在感应电动势的作用下,在导体中产生了感应电流。
若忽略转子导体中感应电动势与感应电流之间的相位差,则可认为感应电流与感应电动势具有相同方向。
根据电磁力定律,当在磁场中与磁力线垂直方向上存在载流导体时,将受到电磁力的作用,电磁力的方向由左手定则确定。
据此,可确定N极下的转子导体将受到向右方向的电磁力F。
S极下的导体将受到向左方向的电磁力F。
电磁力将产生与旋转磁场方向相同的电磁转矩,转子在电磁转矩的作用下,以n转速克服阻力转动起来,转动方向与旋转磁场的旋转方向相同。
如果转子转速一旦等于旋转磁场的转速,则二者之间就没有相对运动了,当然也就不可能产生电磁力和电磁转矩。
因而转子的转速必然要小于旋转磁场的转速,即二者的转速之间有差异,所以这种类型的电动机称为“异步”电动机。
又因为其转子导体的电流是由于电磁感应作用产生的,所以又称为“感应”电动机。
四、转差率
显然,对异步电动机转子导体中产生感应电动势、感应电流以及转矩,起决定作用的是磁场转速与转子转速二者之差,即磁场切割转子导体的速度。
为了衡量异步电动机磁场转速与转子转速的差异程度,引出了转差率的概念。
设旋转磁场相对于静止空间的转速用n1表示,该转速又叫同步转速。
转子相对于静止空间的转速用n表示。
则旋转磁场相对于转子的转速是Δn=nl—n,这个转速差Δn与同步转速n1之比称为异步电动机的转差率,用S表示。
(4-2)
转差率是分析和表示异步电动机性能的一个重要物理量。
当旋转磁场以同步转速nl开始旋转,而转子则因机械惯性尚未转动,转子的瞬间转速n=0,这时转差率S=1。
转子转动起来之后,n>
0,(nl—n)差值减小,电动机的转差率S<
1。
如果转轴上的阻转矩加大,则转子转速n降低,即异步程度加大,才能产生足够大的感应电动势和电流,产生足够大的电磁转矩,这时的转差率S增大。
反之,若转子转轴上的阻转矩减小,则转子转速n升高,S减小。
在理想情况下,转轴上的阻转矩为零,转子转速等于同步转速,即n=n1,S=0。
这表明,异步电动机的转差率S在1到0之间。
在额定运行状态时,转差率SN约在0.015~0.06之间。
由于SN很小,也就意味着额定运行状态下,电机的额定转速接近而小于同步转速的数值,所以一旦知道电机的额定转速nN,就能很快判断出电机的同步转速、极对数以及转差率。
例如额定转速为975r/min的电动机,其同步转速为1000r/min;
若额定转速为1480r/min的电动机,其同步转速为1500r/min。
根据公式(4-2)可以得到电动机的转速常用公式
(4-3)
例4-1有一台三相异步电动机,额定频率fN=50Hz,额定转速nN为975r/min。
试求出电动机的极对数p,额定转差率sN。
解:
∵fN=50Hz,所以同步转速
r/min
对应不同极对数有一系列固定的数值。
由于电机的额定转速接近而小于同步转速的数值,显然与975r/min最接近的同步转速n1=1000r/min。
则极对数p
额定转差率sN
©
2008WuxiInstituteofTechnologyAllRightReserved.
 升级会员
升级会员 