台达伺服问答文档格式.docx
《台达伺服问答文档格式.docx》由会员分享,可在线阅读,更多相关《台达伺服问答文档格式.docx(20页珍藏版)》请在冰豆网上搜索。
2.接上电池盒(已经连接编码器端与驱动器端,电池也安装上),第一次上电会跳ALE60,现在需坐标初始化,ALE60才会消失。
3.坐标初始化有三个方式
尚未作坐标初始化时驱动器会显现ALE60,能够透过以下初始化方式排除:
(1)参数法:
设定P2-08è
271后,设定P2-71è
0x1,,现在ALE60会消失,可是当电池电量低于会跳ALE61,不然正常情形面板看到会显现00000。
(2)DI法:
设定ABSE(0x1D)与ABSC(0x1F),当ABSE(ON),ABSC设定由OFF变成ON,系统将进行坐标初始化,完成后编码器脉波将从重设为0且PUU将重设为P6-01数值。
(3)PR回原点法:
假设设定在PR操纵模式时,能够执行PR回原点方式完成坐标初始化。
4.读取马达绝对位置:
(1)设定P2-70决定马达绝对位置形式及读取方式设定,
P2-70,bit0,DI/O读取单位设定,读取PUU(bit0=0)或Pulse(bit0=1)
P2-70,bit1,通信读取单位设定,读取PUU(bit1=0)或Pulse(bit1=1)
(2)通信读取马达位置单位为Pulse(P2-70=2,bit1=1,bit0=0):
设定P0-49=1或2(1:
只更新编码器数据;
2:
更新编码器数据并将位置误差清除为0),P0-51代表马达绝对位置圈数,P0-52代表马达绝对位置脉波数
(3)通信读取马达位置单位为PUU(P2-70=0,bit1=0,bit0=0)
更新编码器数据并将位置误差清除为0),P0-51=0,P0-52代表马达绝对位置PUU
5.透过上位操纵器读取马达绝对位置信息P0-51及P0-52
6.
(1)当编码器电源低于时会显现ALE61
(2)当绝对型系统第一次上电尚未完成坐标初始化、编码器电源低于或在低电压状况下改换编码器电池,均会发生ALE60:
马达绝对位置遗失。
(3)利用非绝对型编码器系统时,开启绝对型功能设定P2-69=1时,会发生ALE69:
马达性是错误异样。
(4)编码器绝对位置Pulse型式圈数溢位时会发生ALE62;
PUU形式溢位时会发生ALE289。
03、问 交流伺服驱动器A2系列的PR与AB系列有何不同?
答
A2的PR模式共有64个命令程序,程序#0为原点复归,其余(#1~#63)为用户概念的程序,触发命令的方式归纳如下:
04、问 两轴补间,ASDA-M什么缘故能够比两组ASDA-A2做的更好?
答 两轴ASDA-A2的同步误差,需要回到上位操纵器再做判定修正。
ASDA-M能够在CPU内部互换两轴的数据,以两轴的误差适时的做调整,不需要上位操纵器,能够做的更快,更好。
0五、问 利用台达A2伺服系统内部运动操纵模式(Prmode),如何能确认伺服定位是不是完成?
答 能够利用监视变量或示波器观看DO:
MC_OK状态,此DO仅适用于Pr操纵模式。
其概念为当DO:
CMD_OK触发,即Pr命令完成时;
且DO:
TPOS触发,即目标位置抵达同时发生。
现在DO:
MC_OK便会触发。
此DO能确保运动命令有被确实执行,而且确实抵达目标位置,幸免因为Pr命令该下达而没有下达,现在马达DO:
TPOS仍然触发,而以为运动命令完成的错误判定。
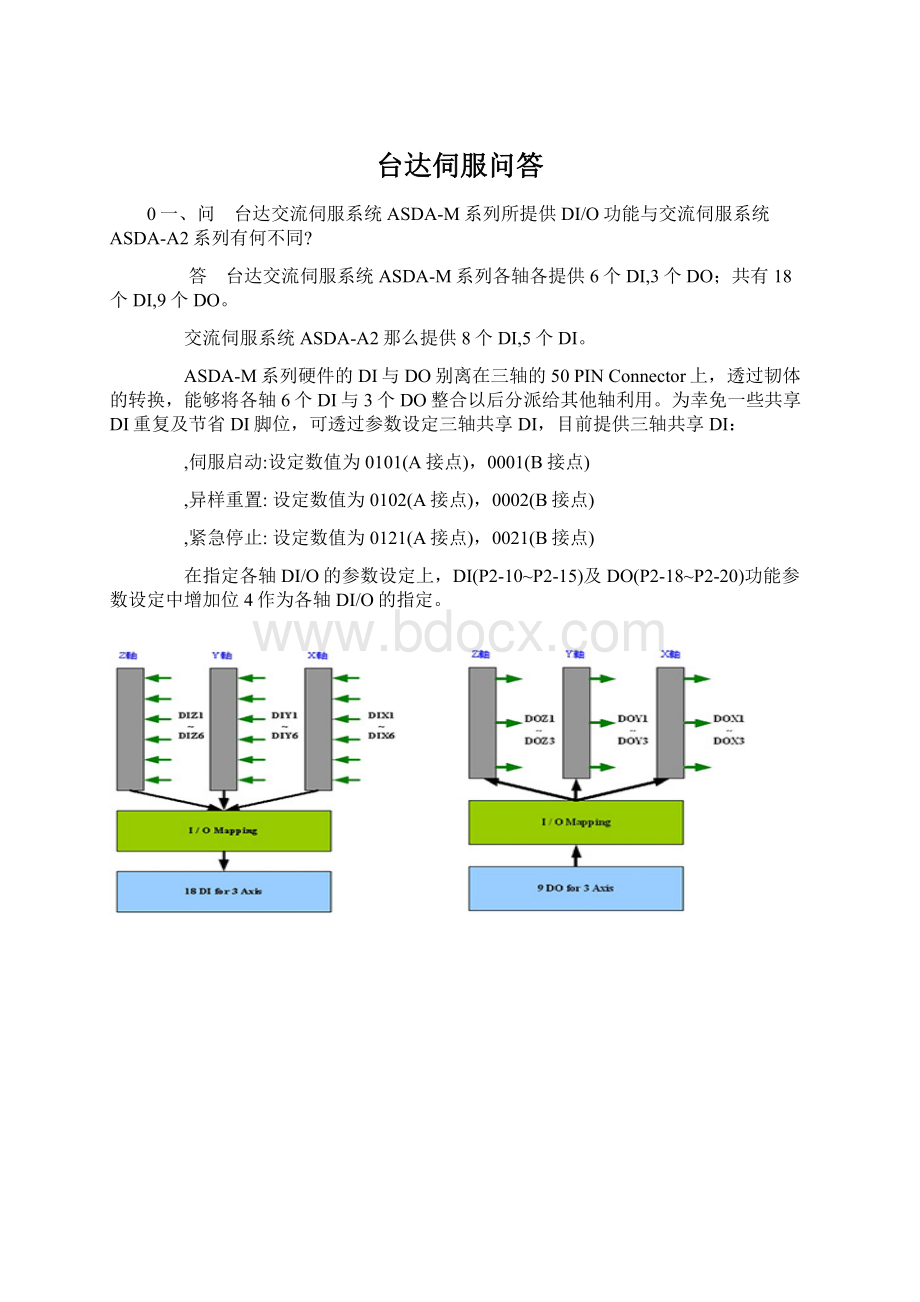
0六、问 ASDA-M跟ASDA-A2有何不同?
答 ASDA-M系统伺服将三台伺服融合在同一机座内,三轴同动操纵,轴间互换数据,没有时刻延迟问题。
软件具有简易的循圆分析功能,可强化系统问题的诊断能力。
07、问 台达ASDA-A2伺服系统提供phasealignment功能,何谓phasealignment功能?
应用处合为何?
与传统系统架构不同性?
答 所谓phasealignment功能即是所谓相位校正功能,系统会自动依据每次所侦测的周期触发讯。
作自动的修正调整,要紧应用在包装机、封口机及高速宝特瓶贴标机(rollfeeder)。
此功能能够改善系统加工时所产生的累绩误差,而且在加工速度高低速快速切换时能确保定位的准确性至+-1mm之内。
1.传统系统架构:
送料轴为系统主轴,切刀加工轴为系统跟从轴,送料轴为等速度运动而切刀加工轴为变速度操纵(可能采纳传统机械凸轮或是A2伺服所内建的电子凸轮),此系统架构要紧缺点为加工速度产能较慢、马达运转加减速频繁易造成马达寿命缩短、系统稳固性操纵较难。
alignment新控制架构:
切刀加工轴为系统主轴,送料轴为系统跟随轴,此系统架构因为主轴与跟随轴皆为等速度运动,加工速度产能快,且搭配高速自动相位校正功能,在高低速快速切换时能确保加工精准性。
0八、问 何谓COMPARE?
答 COMPARE的概念是利用运动轴的瞬时位置数据,与预先寄存在数据数组中的数值做比较,待比较条件成立时就当即输出一个信号DO4,作为后续运动操纵利用。
由于比较的动作是由硬件完成,没有软件延迟的问题,关于高速运转的运动轴也能够准确的比较,本驱动器提供的COMPARE特性说明如下。
COMPARE比较的示用意如下:
0九、问 台达伺服交流马达驱动器在选型上如何善用减速机?
答 驱动器参数群组09-xx为通信参数,用户可在此群组中设定所有相关的通信参数。
在机械系统上,减速机除改变终端与速度端的速度比之外,还能够降低终端惯量。
其公式如下:
举个例子来讲,假设是负载惯量为1000Kgm2;
利用5比减速机,那么惯量就缩小为40Kgm2;
利用10比减速机,那么惯量缩小为10Kgm2。
相同的机构下,若是机台操作速度固定,那么马达需要输出的扭力也随惯量减少而减少,但需要考虑是不是马达已达转速上限(3000RPMor5000RPM)
如马达转速上有余裕的情形下,选用适当的减速机,不但能降低惯量,将马达转速提升,而且可选用低一级的马达,来达到优化搭配。
10、问 A2伺服如安在位置模式(PTmode)设定全死循环功能
答 STEP1:
接线确认
CN5位置反馈信号接头(全闭回路)
提供外部光学尺或编码器(A,B,Z格式),连接伺服形成全死循环回路。
在位置模式,由上位机所下的脉冲位置命令即是参考外部的光学尺操纵回路架构,可参照手册第六章。
STEP2:
先确认驱动器的操纵模式不在全死循环模式下
P1-74:
全死循环未完成设定好时,P1-74“全死循环功能开关”字段必需为0
STEP3:
准备好PC软件,先将P1-72设定为80000
STEP4:
预备好PC软件的示波器,
选择马达回授(1280000/rev)与光学尺回授观看(两个CHANNEL圴为32位)
STEP5:
马达一转时,光学尺对应脉波量计算:
假设客户利用螺杆,那么客户会提供螺杆的Pitch,也会提供光学尺的分辨率
以一个Pitch为5mm,光学尺分辨率为的应用,那么能够计算出,马达一转时,光学尺回授论理上应为
将伺服启动,在平安可不能撞机的前提下,利用JOG功能,低转速让马达往一个方向移动,现在观看马达与光学尺回授,例子如以下图:
以上图为例,利用示波器观看数值差量的功能,量得在同一段时刻内,马达编码器回授走了2326786个位移量,而光学尺回授走了-18178个位移量,现在利用公式:
,能够求得马达一转时,光学尺对应脉波量约等于10000
假设客户不是利用螺杆这种能够得知马达单回转光阴学尺脉波量的应历时,请利用上述方式来计算马达单回转光阴学尺脉波量
假设客户是利用螺杆这种能够得知马达单回转光阴学尺脉波量的应历时,请利用上述方式来确认马达单回转光阴学尺脉波量是不是跟理论值相近
STEP6:
以上图为例子,能够发觉光学尺的脉波增加方向与马达回授相反,现在利用P1-74的”光学尺回授正反相选择”设定为1,把回授讯号反向后,两个脉波的增加方向会一致如以下图
STEP6:
请让马达进行正反转的动作,确认正反转回授脉波量都是正常
上升时,运算出"
马达一回转光阴学尺的脉波量"
约为10000,且增加方向同向
下降时,运算出"
也约为10000,且增加方向同向
STEP7:
假设螺杆类型的应用,实测后,实际与理论的"
相近,那么依照理论值设定好P1-72
假设其他无法得知理论的“马达一回转光阴学尺的脉波量”应用,那么利用实际的“马达一回转光阴学尺的脉波量”设定好P1-72
STEP8:
设定好P1-72与P1-74的"
光学尺回授正反相选择"
后,现在能够将P1-74“全死循环功能”打开
注意事项:
当利用全死循环时,回授讯号主若是参考光学尺,因此命令坐标是以光学尺为主,也确实是,当齿比为1:
1的状况下,脉波命令下1,就会去跟随光学尺回授1,必需注意齿轮比的利用与非全死循环时利用不可弄混
1一、问 安装伺服软件在Win7作业环境下注意事项:
答 1.安装时,请在””上按鼠标右键,选择”以系统治理员身份执行”,来安装伺服软件。
2.安装完后,若是无法正常利用伺服软件,请在依据以下方式更改软件的兼容性。
更改利用者兼容性
1.请在软件上按鼠标右键,选择”内容”。
2.再跳出的画面,选择”兼容性”页面,勾选下面两各选项
(1).以兼容模式执行那个程序。
同时在下拉式选单当选择”WindowsXP(ServicePack2)”或是(ServicePack3)都能够
(2).以系统治理员的身分执行此程序
假设在Win7操作系统上利用ASDA任何一套软件,假设无法开启参数编辑器功能,请先手动更新以下设定
1.开启操纵台-->
BDEAdministrator
(注:
假设未看到BDEAdministrator项目,请将检视方式改成小图示即可看到)
2.开启后,在画面左侧的页签选择Database,在Database上按左键,选Options,跳出如以下图画面,选择andWindows95/NT项目,然后按下OK即可。
3.接着开启ASDA软件,操作方式不变,即可正常利用ASDA软件。
1二、问 在A2系列伺服PR模式下,是不是有如A系列一样有Hold功能的DI,可供用户作暂停PR模式之运动,待Hold之DI->
off后,PR模式继续执行其未执行完之动作流程?
答 A2系列伺服所提供之DI功能”STOP”有类似A系列之”Hold”之功能。
13、问 何谓A2数据数组?
如何对数据数组作读写?
答 由于A2增加了许多运动操纵功能,例如CAPTURE/COMPARE/E-CAM,这些功能都需要许多经历空间来贮存运作所需的数据,因此驱动器保留了内部一块持续的经历空间来知足此需求。
数据数组的内容无法直接被外界读取/写入,必需透过系统参数P5-10~P5-13来达到。
简而言之,确实是先于P5-11设定欲读/写的地址,然后读/写P5-12或P5-13即可存取数据数组的内容。
SAMPLE:
假假想要持续写入3笔数据100,200,300到数据数组的地址11,12,13中,操作步骤如下:
一、面板写入:
利用P5-12(读/写窗口#1),因P5-13不支援由面板写入:
1.设定地址:
写入P5-11=11(第一笔写入的地址)
2.写入资料:
写入P5-12=100(写入到地址11,写入后P5-11自动加1)
写入P5-12=200(写入到地址12,写入后P5-11自动加1)
写入P5-12=300(写入到地址13,写入后P5-11自动加1)
如此便已写入完成,接着读取地址11,12,13检视内容是不是为适才写入的数值。
二、面板读取:
利用P5-13(读/写窗口#2)能够依序读取持续的内容。
写入P5-11=11(第一笔读取的地址)
2.读取数据:
面板显示P5-13时,
第一次按SET键,显示地址11的数据内容100,按MODE键跳出
第二次按SET键,显示地址12的数据内容200,按MODE键跳出
第三次按SET键,显示地址13的数据内容300,按MODE键跳出
注:
以P5-13每读取一次数据后,P5-11自动加1,因此能够持续读取。
假设以P5-12每读取一次数据后,P5-11不改变,无法自动读取下一笔。
假设利用通信方式读/写数据数组,操作流程与面板类似,且P5-12与P5-13功能完全相同。
14、问 何谓伺服的低频摆振?
当发生低频摆振时如何处置?
答 若系统刚性不足,在定位命令结束后,即使马达本身已经接近静止,机械传动端仍会出现持续摆动。
低频抑振功能可以用来减缓机械传动端摆动的现象。
低频抑振的范围为~。
本功能提供手动设定与自动设定,但目前只有ASDA-A2系列机种支持此功能。
低频抑振方式分为自动及手动方式:
(1)自动设定
假设用户难以直接明白频率的发生点,能够开启自动低频抑振功能。
此功能会自动寻觅低频摆动的频率。
假设P1-29设定为1时,系统会先自动关闭低频抑振滤波功能,并开始自动寻觅低频的摆动频率。
当自动侦测到的频率维持固定后,P1-29会自动设回0,并会将第一摆动频率设定在P1-25且P1-26设为1。
第二摆动频率设定在P1-27且将P1-28设为1。
当P1-29自动设回零后,低频摆动仍然存在,请检查低频抑振P1-26或P1-28是不是已被自动开启。
假设P1-26与P1-28皆为零,代表没有侦测到任何频率,现在请减少低频摆动检测准位P1-30,并设定P1-29=1,从头寻觅低频的摆动频率。
(2)手动设定
低频抑振有两组低频抑振滤波器,第一组为参数P1-25~P1-26,第二组为参数P1-27~P1-28。
能够利用这两组滤波器来减缓两个不同频率的低频摆动。
参数P1-25与P1-27用来设定低频摆动所发生的频率,低频抑振功能唯有在低频抑振频率参数设定与真实的摆动频率接近时,才会抑制低频的机械传动端的摆动。
参数P1-26与P1-28用来设定经滤波处置后的响应,当P1-26与P1-28设定越大响应越好,但设太大容易使得马达行走不顺。
参数P1-26与P1-28出厂值默许值为零,代表两组滤波器的功能皆被关闭。
1五、问 伺服煞车电阻利历机会为何?
答 当伺服驱动器搭配马达运转时,假设驱动器面板显现ALE05(回生能量异样)时,代表马达回生产生的能量超过驱动器内建回生电阻所能消耗的能量,现在必需安装回生电阻,提高驱动器回生能量消耗速度。
ASDA-A2220V系列内建回生电阻规格:
ASDA-A2400V系列内建回生电阻规格:
利用回生电阻时需注意以下几点:
1.请正确设定回生电阻之电阻值(P1-52)与容量(P1-53),不然将阻碍该功能的执行。
2.假设利用者欲以并联方式增加回生电阻器之功率时,请确信其电阻值是不是知足限制条件。
当利用者要外接回生电阻时,请确信所利用之电阻值与内建回生电阻值相同。
假设利用回生电阻瓦特数不够时,可并联相同之回生电阻用来增加功率。
3.在自然环境下,当回生电阻器可处置之回生容量(平均值)在额定容量下利历时,电阻的温度将上升至120°
C以上(在持续回生的情形下)。
基于平安理由,请采纳强制冷却方式,以降低回生电阻之温度,或建议利用具有热敏开关之回生电阻器。
关于回生电阻器之负载特性,请向制造商洽询。
4.利用外部回生电阻时,电阻连接至P、C端,P、D端开路。
外部回生电阻请尽可能选择上表建议的电阻数。
 升级会员
升级会员 