机考现代控制理论_精品文档.doc
《机考现代控制理论_精品文档.doc》由会员分享,可在线阅读,更多相关《机考现代控制理论_精品文档.doc(8页珍藏版)》请在冰豆网上搜索。
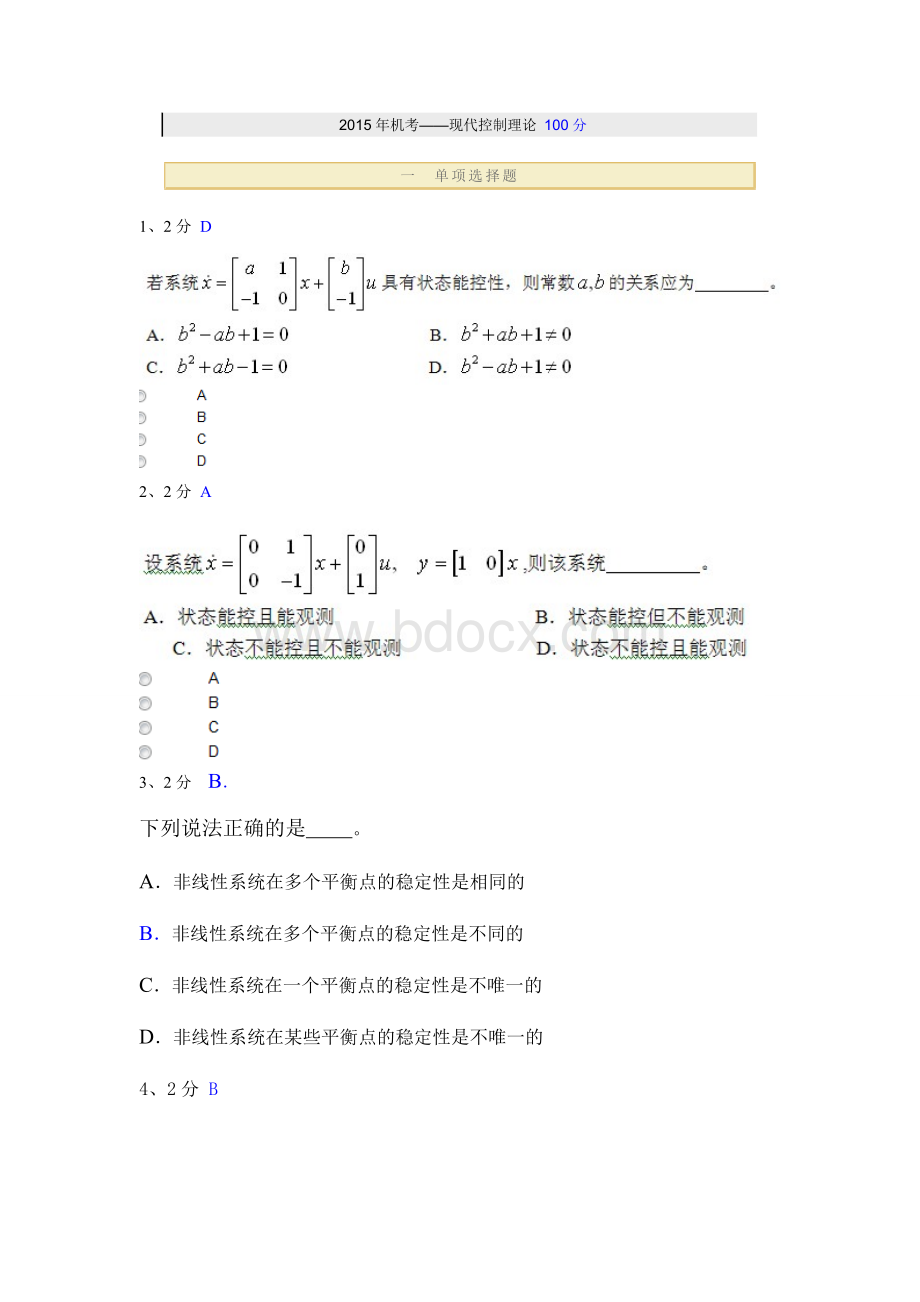
2015年机考——现代控制理论100分
一 单项选择题
1、2分D
2、2分A
3、2分B.
下列说法正确的是 。
A.非线性系统在多个平衡点的稳定性是相同的
B.非线性系统在多个平衡点的稳定性是不同的
C.非线性系统在一个平衡点的稳定性是不唯一的
D.非线性系统在某些平衡点的稳定性是不唯一的
4、2分B
5、2分C
6、2分A
7、2分B
8、2分A.
分离定理是指可独立进行设计 。
A.状态反馈和状态观测器 B.输出反馈和状态观测器
C.状态反馈和输出反馈 D.状态反馈和补偿器
9、2分B.
设计全维观测器的条件是 。
A.(A,B)能控 B.(A,C)能观测
C.(A,B)能控,(A,C)不能观测 D.(A,B)可镇定
10、2分D
11、2分A.
12、2分B.
13、2分A.
下列说法正确的是 。
A.状态反馈可任意配置极点,输出反馈也可任意配置极点
B.状态反馈可任意配置极点,输出反馈不可以任意配置极点
C.状态反馈不可以任意配置极点,输出反馈可以任意配置极点
D.状态反馈不可以任意配置极点,输出反馈也不可以任意配置极点
14、2分D.
15、2分B.
16、2分D
17、2分B
下列说法正确的是 。
A.状态反馈可改变极点,但不会出现系统零极点对消
B.状态反馈可改变极点,也会出现系统零极点对消
C.状态反馈不改变极点,也不会出现系统零极点对消
D.状态反馈不改变极点,但会出现系统零极点对消
18、2分B
19、2分C
二 判断题
1、对线性定常系统作非奇异线性变换会改变系统的特征根和极点分布。
X
2、要使得观测器估计的状态尽可能快地逼近系统的实际状态,观测器的极点应该比系统极点快10倍以上。
X
3、状态反馈系统的瞬态性能主要是由极点决定的。
V
4、平衡状态渐近稳定包含了BIBO稳定。
V
5、对于初始松弛系统,任何有界输入,其输出也是有界的,称为BIBO系统。
V
6、若线性系统是李亚普诺夫意义下稳定的,则它是大范围渐近稳定的。
V
7、若传递函数存在零极对消,则对应状态空间模型描述的系统是不能控的。
X
8、工程中较为复杂的系统,通常是由若干个子系统按某种方式连接而成的。
这样的系统称为组合系统。
V
9、状态空间表达式既可以描述初始松弛(即:
初始条件为零)系统,也可以描述非初始松弛系统。
V
10、具有对角型状态矩阵的状态空间模型描述的系统可以看成是由多个一阶环节串联组成的系统。
X
11、通过适当选择状态变量,可将线性定常微分方程描述其输入输出关系的系统,表达为状态空间描述。
V
12、若系统状态完全能控,则对非渐近稳定系统通过引入状态反馈实现渐近稳定,称为镇定问题。
V
13、状态反馈不改变系统的能控性。
V
14、一个系统BIBO稳定,一定是平衡状态处渐近稳定。
X
15、若一个系统是李亚普诺夫意义下稳定的,则该系统在任意平衡状态处都是稳定的。
X
16、如果线性离散化后系统不能控,则离散化前的连续系统必不能控。
X
17、若传递函数存在零极相消,则对应的状态空间模型描述的系统是不能控不能观的。
X
18、传递函数只能给出系统的输出信息;而状态空间表达式不仅给出输出信息,还能够提供系统内部状态信息。
V
19、由状态转移矩阵可以决定系统状态方程的状态矩阵,进而决定系统的动态特性。
V
20、传递函数是系统初始松弛(即:
初始条件为零)条件下,输出时间变量与输入时间变量之比。
X
21、对一个系统,只能选取一组状态变量X
22、极点配置实际上是系统镇定问题的一个特殊情况。
X
23、李亚普诺夫第二法也可以研究非线性时变系统的稳定性问题。
V
24、对系统X=AX,其李亚普诺夫意义下的渐近稳定性和矩阵A的特征值都具有负实部是一致的。
V
25、系统的状态观测器存在的充分必要条件是:
系统能观测,或者系统虽然不能观测,但是其不能观测的子系统的特征值具有负实部。
V
26、一个系统的平衡状态可能有多个,因此系统的李亚普诺夫稳定性与系统受干扰前所处得平衡位置无关。
X
27、线性定常系统为状态完全能控的充分必要条件是其能控性矩阵Qc满秩。
V
28、若一个对象的连续时间状态空间模型是能控的,则其离散化状态空间模型也一定是能控的。
X
29、传递函数G(s)的所有极点都是系统矩阵A的特征值,系统矩阵A的特征值也一定都是传递函数G(s)的极点。
X
30、由一个状态空间模型可以确定惟一一个传递函数。
V
31、状态变量的选取具有非惟一性。
V
 升级会员
升级会员 