蚕豆剥豆机设计机械原理设计文档格式.docx
《蚕豆剥豆机设计机械原理设计文档格式.docx》由会员分享,可在线阅读,更多相关《蚕豆剥豆机设计机械原理设计文档格式.docx(18页珍藏版)》请在冰豆网上搜索。
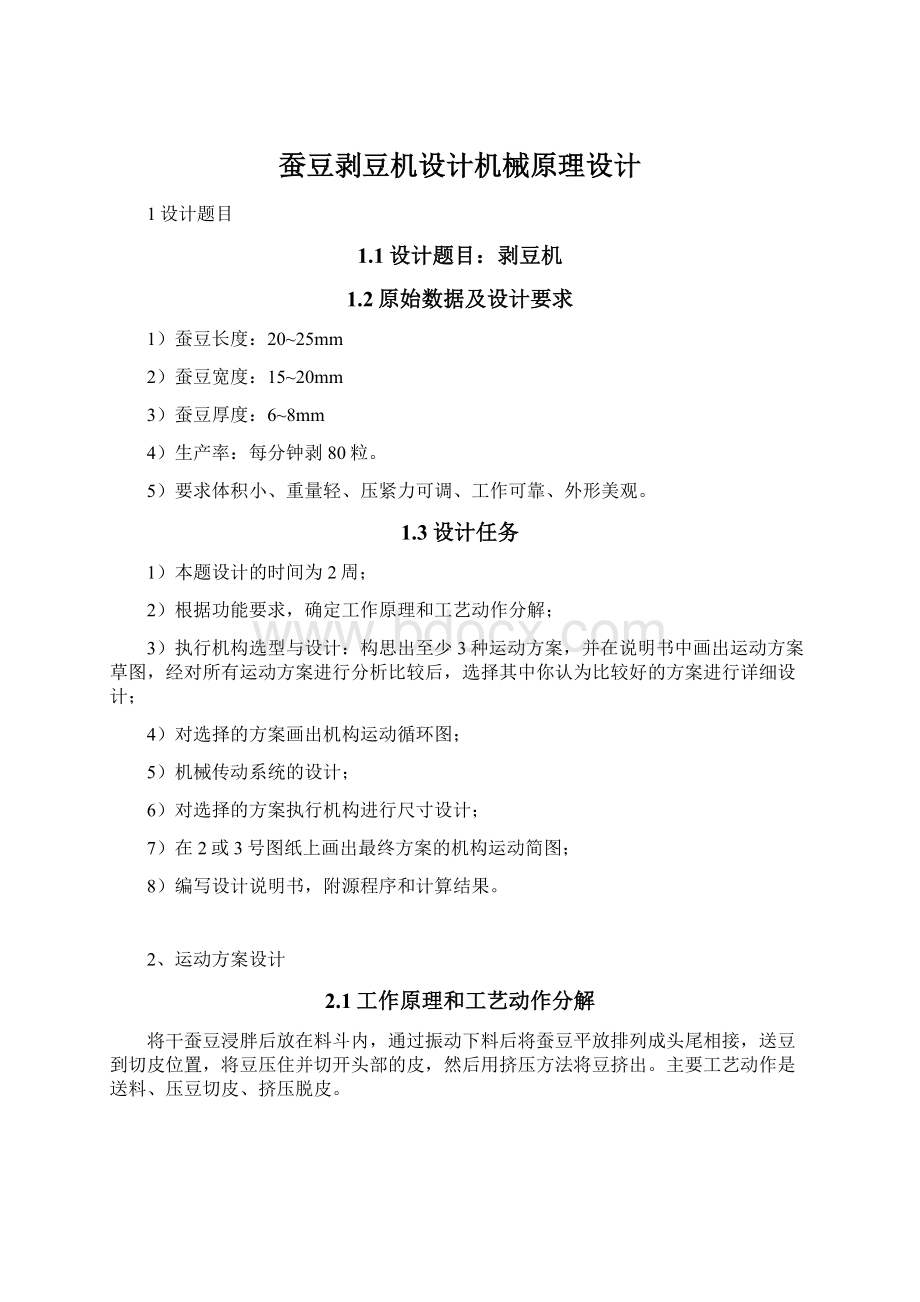
A
不完全齿轮机构
平带传动
曲柄滑块机构
曲柄摇杆机构
压豆切皮
B
凸轮机构
导杆机构
直接将刀片固定于
滑槽上
挤压脱皮
C
双摇杆机构
压辊
表2-1
2.2.1间歇送料
方案一:
不完全齿轮机构平带传动
功能:
将旋转运动转换为单向间歇转动。
我们运用了不完全齿轮机构作为我们的步进传输蚕豆的装置。
我们将该机构安放在机架导轨的右下方,由主动轮不完全齿轮1带动不完全齿轮2,从而带动输送带,实现豆的间歇传动。
机构的活动构件n=4,低副数目Pl=3,高副数目Ph=5,局部自由度F’=0,虚约束p’=0,机构的自由度F=3n-(2Pl+Ph)=3×
4-2×
3-5=1
图2-2
方案二:
我们将该机构安放在机架导轨的正下方,并我们运用了曲柄摇杆机构作为我们的步进传输蚕豆的装置。
且在连杆上设有铰链点,当摇杆转动一周时,滑块实现运料功能。
机构的活动构件n=3,低副数目,Pl=4高副数目,Ph=0局部自由度,F’=0虚约束p’=1机构的自由度F=3n-(2Pl+Ph)=3×
3-2×
4=1
图2-3
方案三:
我们运用了曲柄摇杆机构作为我们的步进传输蚕豆的装置。
我们将该机构安放在机架导轨的正下方,并且在连杆上设有铰链点,使之与带有拨动齿的拨杆相铰接,从而我们可以利用连杆的平动来实现拨动蚕豆向前移动的动作。
首先我们设定曲柄摇杆步进机构的初始位置,即其左齿1的左极限位置在机架管2管口的左侧,一旦步进机构启动,当有蚕豆从机架管2掉落进机架导轨后,连杆带动与其铰接的拨杆向前平动,此时落进导轨的第一颗蚕豆会被左齿1向前拨动行程L。
并且我们设定每一个齿运动的行程大于每两个齿的间隔。
所以当左齿1将蚕豆向前拨动行程L后,即步进机构整体运动到其右极限位置,接着,步进机构向其左极限位置运动。
当步进机构第二次由左向右运动时,蚕豆会被左齿2再接着向前拨动行程L,与此同时,第二颗蚕豆会从机架管2掉进机架导轨中,被步进机构的左齿1向前拨动行程L。
以次类推,每一颗蚕豆经由八个齿向前推动,同时也实现了对蚕豆的连续传动。
而且,根据曲柄摇杆机构的急回特性,还可以保证步进机构在拨动一颗蚕豆后,可以迅速返回拨动下一颗蚕豆,缩短了传送的时间,提高效率。
机构的活动构件n=7,低副数目,Pl=10高副数目,Ph=0局部自由度,F’=0虚约束,p’=0机构的自由度F=3n-(2Pl+Ph)=3×
7-2×
10=1
图2-4
我们对三种方案中的机构作了如下的对比:
1.从机构的功能来看:
方案一主动轮1转一周,从动轮2转半周。
在此半周内,从动轮2有间歇、加速运动,匀速运动和减速运动阶段。
利用其间歇运动的特点,主动轮每转过一周,从动轮向左传送一颗蚕豆。
所以可以实现蚕豆的顺次传送,可以保证蚕豆的直线排列。
方案三采用的是曲柄滑块机构来代替不完全齿轮机构,在滑块上同样开有只能容纳一颗蚕豆的孔,利用滑块的直线往复运动,实现从机架管1处接下一颗蚕豆,运送至机架管2管口掉落。
所以两种机构都可以实现依次传送蚕豆,并且保证蚕豆的直线排列。
2.从机构的工作性能来看:
方案一不完全齿轮每转一周可以传送四颗蚕豆,方案二用摇杆运动动不稳定,方案三滑块来回往复运动一次可以转送一颗蚕豆,效率较低。
如果要提高传送的效率必须加快曲柄的转速,但是曲柄滑块机构滑块的质心是在做变速运动,所产生的惯性力难于用一般的平衡方法加以消除,所以并不适合高速运动。
3.从机构的动力性能来看:
方案一不完全齿轮速度会突变,因此会有刚性冲击,不适合用于重载的场合。
方案二和方案三曲柄滑块和摇杆机构运动副为低副,是面接触,所以磨损较小,可以承受较大的载荷。
但是我们此处只是用于传送蚕豆,没有较大的载荷,所以两者都适合该工艺要求。
4.从制造加工经济性来看:
方案二三曲柄滑块机构制造简单,生产成本底,并且可以使整个机构的结构紧凑。
方案一不完全齿轮机构的加工相对复杂,并且所占的空间比曲柄滑块大。
综上:
为了保证传送的效率,我们最终采用方案一的不完全齿轮机构来实现送料的过程。
2.2.2压豆切皮
凸轮机构导杆机构
中采用的是凸轮机构导杆机构,并且在导杆杆上套有弹簧,从而实现压紧力可调。
机构的活动构件n=7,低副数目Pl=10,高副数目Ph=0,局部自由度F’=0,虚约束p’=0,机构的自由度F=3n-(2Pl+Ph)=3×
是采用了曲柄滑块家机构,并在滑块上固定刀片。
机构的活动构件n=3,低副数目Pl=7,高副数目,Ph=0局部自由度,F’=0虚约束p’=0,机构的自由度F=3n-(2Pl+Ph)=3×
5-2×
7=1
图2-5
直接将刀片固定于滑槽上
我们在最后一个齿,即齿8处前端安放有刀具,用于蚕豆切皮。
为实现这一动作,我们利用了平底凸轮机构。
当其处于远休止的阶段,使其平底推杆底部距离导轨的垂直距离略小于蚕豆的厚度,因此可以实现对蚕豆的暂时保压固定,并且我们在平底推杆上套有弹簧,通过对弹簧刚度的设定,我们可以调定平底对蚕豆的压紧力的大小,所以我们可以保证能固定蚕豆,使其利于刀具对其的切皮,并且也可以不压扁蚕豆。
此外,我们将凸轮的转轴中心距离齿8的左极限位置的水平距离设定得略小于齿8的行程L。
所以当凸轮压住蚕豆的时候,齿8还可以继续向前移动,从而可以切近蚕豆中,实现压紧切皮的动作。
第一颗蚕豆被压紧切皮后,凸轮的远休止阶段结束,平底推杆向上移动,步进机构齿8也由其右极限位置向左运动,实现退刀,蚕豆停止在原位。
当齿8再次运动到其右极限位置的过程中,将第二颗蚕豆推至第一颗蚕豆停留处,与第一颗蚕豆发生碰撞,借助这一推力,第一颗蚕豆向前移动,从前方紧接的倾斜机架导轨滑落致后面的机构当中。
所以我们通过曲柄摇杆机构和平底凸轮机构可以实现对蚕豆的传送和压紧切皮一系列动作。
图2-6
我们从一下方面方案进行了对比:
1.从机构的功能来看:
方案一是利用凸轮远休的特点来对蚕豆实现暂时的保压固定。
方案二是通过从动件与机架的移动副,实现上下往复移动可以实现压紧切皮的动作。
方案三直接无法压紧。
所以只有方案一二两种机构可以达到此项工艺要求,方案三不行。
2.从机构的工作性能来看:
方案一在导杆杆上可以套有弹簧,可以实现压紧力可调,所以可以保证不会压坏蚕豆,传力效果好,承载能力强。
方案二利用从动件的左右移动,无法实现较长时间的保压固定,并且与机架的磨损较大。
3.从机构的运动性能来看:
方案一凸轮运动平稳,凸轮与导杆的接触面间易形成油膜,润滑较好,所以可以用于高速运动的场合,易于保证生产效率。
方案二有连杆机构,不能用于高速运动的场合。
方案三无力支撑。
方案一涉及的构件少,仅有凸轮,导杆,加工制造方便,成本较底。
方案二涉及机构过,包括连杆,滑块,加工成本高,所占空间大,结构不紧凑。
为了保证切皮的效率,我们最终采用方案一的凸轮机构和导杆机构来实现切皮的过程。
2.2.3挤压脱皮
图2-7
机构的活动构件n=5,低副数目Pl=7,高副数目Ph=0,局部自由度F’=0,虚约束p’=0,机构的自由度F=3n-(2Pl+Ph)=3×
图2-8
机构的活动构件n=6,低副数目Pl=8,高副数目Ph=0,局部自由度F’=0,虚约束p’=0,机构的自由度F=3n-(2Pl+Ph)=3×
6-2×
8=2
为实现对蚕豆的挤压脱皮,我们选用的是轧辊装置。
设定两轧辊之间的间隙为5mm,略小于蚕豆的厚度。
蚕豆由于其重力,掉落进轧辊,在通过轧辊间歇时,两个轧辊同时向中心回转,对蚕豆一端挤压,由于蚕豆另一端已经被切皮,所以蚕豆可以从切皮端被挤出。
图2-9
5.从机构的功能来看:
方案一采用曲柄滑块机构进行挤压脱皮,滑块运动史也地面进行配合,实现挤压脱皮。
方案二采用的是双摇杆机构,在双摇杆之间进行挤压脱皮,从侧面进行输出,方案三是利用压辊进行挤压脱皮,利用双压辊之间的距离进行挤压脱皮。
6.从机构的工作性能来看:
方案一曲柄滑块机构利用曲柄机构无死点进行脱皮,效率高,稳定方案二用摇杆运动动不稳定,方案三利用压辊进行脱皮。
7.从机构的动力性能来看:
方案一曲柄滑块质心会突变,,所产生的惯性力难于用一般的平衡方法加以消除,而且所用的空间大。
方案二机构运动副为低副,是面接触,所以磨损较小,可以承受较大的载荷。
方案三压辊并不需要太大的要求,空间小。
但是我们此处只是用于挤压蚕豆,没有较大的载荷,所以方案一和三都适合该工艺要求。
8.从制造加工经济性来看:
方案一曲柄滑块机构制造简单,生产成本底,但是占用空间大。
方案二两个摇杆机构的加工相对复杂,并且所占的空间比曲柄滑块还大。
方案三压辊生产和装配更为简单。
为了保证挤压的效率,我们最终采用方案三的压辊机构来实现挤压的过程。
2.3根据工艺动作和协调要求拟定运动循环图
图2-10运动循环图
运动循环图是以凸轮的运动规律即转角为基准来绘制的。
振动下料机构和压紧切皮机构的运动循环图为一条直线,代表它们在整个过程中都处于匀速运动状态。
送料不完全齿轮的运动循环图为四条直线段,每一条直线段代表其在这段区间内处于匀速运动状态,空白处表示其处于间歇状态,此时正是压豆切皮机构执行切皮过程。
压豆切皮凸轮的运动循环图为三段完全相同的折线,每个折线表示压豆切皮机构在这段时间内完成一个切皮过程,三段折线表示其在凸轮转动一圈的过程中完成3次切皮。
上升的线段表示刀片向下运动完成切皮过程,下降的线段表示刀片向上运动完成空程返回过程,其余的直线段表示刀片处于停歇状态。
2.4机械传动系统的设计选择和评定
它是以一个小齿轮和一个不完全齿轮为主动轮,由主动机、联轴器、带传动二级减速器驱动。
工作时,主轴带动小齿轮和不完全齿轮转动,一对不完全齿轮通过啮合带动带轮的转动,从而使传送带的运动进而带动带上的豆子的运动。
小齿轮的转动带动大齿轮的转动,从而使和大齿轮连在一起的凸轮转动。
大齿轮的转动还带动过度齿轮的运动,过度齿轮传递动力给压辊,从而使压辊转动将豆子挤压切皮。
2.4.1齿轮传动
电动机传出的扭距通过一个有保护作用的联轴器,传人一个有分配传动比的减速器,然后通过联轴器传人开式齿轮副,进入带动两轴的传动。
如图3.2所示。
图2-11
这种传动方式的特点是:
工作可靠,使用寿命长,传动准确,效率高,结构紧凑,功率和速度适用范围广等,但是其成本较高,对于制造这种小型的剥豆机不划算。
2.4.2V带传动
由电动机的转距通过如图3.3所皮带传人冲压机直接传人主动轴。
示:
图2-12
这种传动方式具有传动平稳,噪音下的特点,同时以起过载保护的作用。
带传动的成本较低,对于剥豆机这种对传动比要求不是很高的机器可以选择带传动来减速,制造方便且比较经济。
2.5传动系统的确定
鉴于上节的分析,考虑到所设计的是剥豆机,因此我们可以选择带传动来达到减速的目的。
且齿轮减速器一般体积较大,造价较高,不符合剥豆机轻便价廉的宗旨。
2.5.1工作机外部传动系统的确定
传动系统如图3.4所示:
图2-13工作机外部带传动图
所以选用了带传动来降低电动机的转速,减速比i=5.62.
2.5.2选择电动机
电动机选择包括选择类型,结构模式,容量(功率)和转速,并确定型号。
工业上一般用三相交流电源,无特殊要求一般应选三相交流异步电动机。
电动机能提供的功率范围很大,从毫瓦级到万千瓦级。
使用和控制非常方便,具有自起动、加速、制动、反转、掣住等能力,能满足各种运行要求,电动机的工作效率较高,又没有烟尘、气味,不污染环境,噪声也较小。
运行可靠、价格低廉、结构牢固。
剥豆机选择Y80M2-4电动机,转速大小适中,功率合适,重量较轻,属于卧式。
价格便宜适合小型食品机械。
Y80M2-4电动机的额定功率为0.75kW,满载转速为1390r/min,质量为19kg,堵转转矩为2.3
,最大转矩为2.3
。
2.5.3计算传动装置总传动比和分配各级传动比
1)传动装置总传动比
是连接压辊的那两根轴的转速,由于剥豆机的生产率为每分钟剥80粒,所以我们设计压辊每转一圈恰好剥一颗豆子,因此其转速为81
2)分配各级传动比
取V带传动的传动比
=5.62,则其余几对齿轮传动比以此如下:
2.5.4计算传动装置的运动和动力参数
1)各轴的转数
电动机轴为0轴,大带轮轴为I轴,凸轮轴为II轴,过度齿轮轴为III轴,轧辊轴为IV轴,各轴的转速为
2)各轴的输入功率
按照电动机的额定功率
计算各轴的输入功率,即
式中,
为从电动机至压辊之间各传动机构的效率。
由机械设计手册可查得:
V带传动
;
圆柱齿轮传动
,
3)各轴的转矩
将以上计算结果整理后列于下表,供以后设计计算时使用。
项目
功率(kw)
转矩T(N·
m)
转速n(r/min)
传动比i
效率η
电动机轴
0.75
5.15
1390
0.99
Ⅰ轴
0.69
23.70
278
0.92
5.14
Ⅱ轴
0.66
45.35
27
0.97
Ⅲ轴
0.63
222.83
0.33
Ⅳ轴
0.60
70.74
81
3执行机构尺寸设计
3.1执行机构各部分尺寸设计
3.1.1凸轮设计
图3-1凸轮结构草图
凸轮是用来控制压块和刀片的运动的,由于剥豆机的生产率为每分钟80粒,因此本方案中我们所设计的凸轮是个非常对称的图形。
凸轮运动一周可带动刀片上下往复运动三次,即凸轮转一圈刀片可以切三颗豆子。
由此我们也可以确定轴2的转速为27r/min.由上图我们可以看出,凸轮在0~15°
,105°
~135°
,225°
~255°
,345°
~360°
之间是间歇状态,此时刀片近似不动;
凸轮转过15°
连接刀片的杆件在顶端弹簧力的作用下向下运动,当凸轮运动到60°
位置时刀片处于最下端,此时压块在弹簧力作用下给豆子一个大小适中的向下力,使豆子不能移动,而与此同时刀片,刀片的形状为V型,将豆子的头部切开一个口子便于最后的挤压切皮。
凸轮转过90°
后连接刀片的杆件受到凸轮的一个向上的推力,于是杆件克服其顶端的弹簧力向上运动,刀片在杆件的带动下离开豆子向上运动。
当凸轮转到105°
时,刀片被推至最顶端,在接下来的30°
范围内,虽然凸轮在转动,但刀片近似不动,处于停歇状态。
此时刀片完成一次切皮。
在凸轮转动360°
的过程中刀片还要完成两个工作循环,其运动过程和第一次切皮过程完全相同。
由于次切皮过程是通过凸轮和与凸轮相连接的杆件共同完成,所以凸轮的尺寸和杆件的长短是相互制约的,也就是说我们如果把凸轮的尺寸先定下来了,那么杆件的长度也就随之定了。
首先我们来定它的形状,它实际是由一个正三角形演变而来的,三角形的三个尖角变成三段光滑的弧线,每一段的弧度为15°
,为了避免杆件在凸轮上运动产生过大的振动,每一段弧线都必须与两边的直线刚好相切,这样可以避免出现尖角,不会出现过大的振动。
下面绘出其设计草图
图3-2凸轮设计计算草图
下面我们来计算凸轮各部分的尺寸,按照上面所设计的凸轮的形状可以列方程来求其余部分的尺寸。
凸轮和齿轮4共同装在轴2上,所以我们可以设计演变成凸轮的那个正三角形刚好是齿轮4所代表的圆的内接三角形。
我们已知大圆的半径即AO1=150mm,我们可以设小圆半径即BO2=x。
带入数值后可以求出小圆半径以及小圆圆心的位置即O1O2的距离。
至此我们求出了凸轮的所有尺寸。
3.1.2不完全齿轮的设计
图3-3不完全齿轮的机构设计草图
3.1.3不完全齿轮形状的设计
根据图5.1的运动循环图,我们知道不完全齿轮的设计要依赖于凸轮的运动规律来定。
在凸轮切豆的一定区域内不完全齿轮必须实现间歇停转。
故我们设计出如图5.4所示的不完全齿轮的结构草图。
在齿轮的整个360°
区域内有三个区间是没有齿的,且这三个区间是均匀分布于齿轮之上的,每个区间都是30°
3.1.4不完全齿轮尺寸的设计
由于它是非标准件,我们可以根据平带轮的直径和整个剥豆机内个构件的分布位置来定不完全齿轮的直径。
这里我们定为100mm。
模数为2mm。
每个啮合区间有9个齿。
不完全齿轮的材料选为HT300。
3.1.5料斗形状和尺寸的设计
蚕豆的原始数据如下:
蚕豆长度:
20~25mm
蚕豆宽度:
15~20mm
蚕豆厚度:
6~8mm
为了使豆子成一颗颗掉到皮带上,这里我们设计料斗下端的出口略比一个蚕豆的体积要大点的长方形,且长为25mm,宽为15mm,料斗下端不易做的过长,因为这里不叫窄,豆子很容易在这里堵住,所以我们定它的高度为50mm,差不多两颗豆子的长度。
整个料斗的下面成一个空心的长方体,料斗的上方是个锥体,从料斗口部到下端均匀减小,因为要保证料斗一次能装一定量的豆子,所以这里我们要将料斗的上面设计的稍微大点。
这里定料上部的高度为162mm,长为200mm,宽为150mm,,料斗的壁厚设为3mm。
整个料斗的形状就跟我们平常所见到的漏斗一样。
其材料为45钢。
下面我们绘出料斗结构设计草图
图3-4料斗的结构设计草图
3.2机构运动简图
图3-5整体运动简图
4参考文献
[1]王德祥,魏杰,俞桂蛾,板栗剥壳去衣机的研制【J】,北京林业大学学报,2002,24(4):
111—112。
[2]赵德春,玉米剥皮机的研究设计【J】,农机化的研究,2001,
(2):
9—60。
[3]袁鼎山,FBPY型小麦剥皮机的结构原理及性能【J】,粮食与饲料工业,2005,(4):
15。
[4]田庆国,碾米机具与大米加工【J】,茶叶机械杂志,1995,
(1):
25。
[5]资友,谷物脱皮机【J】,农牧与食品机械,1994(3):
44。
[6]Walter(Hamburg,DE,US)Suhrbier,Rolf(Nordersted,DE,US).Machineforpeelingcerealgrainsbymeansofrubberrolls[patent].<
<
US:
452890>
>
1985(7).
[7]陈韶光,果蔬脱皮新工艺
(二)【J】,食品科技,1994
(2):
19—21.
[8]王庆保,大蒜脱皮机集锦【J】,江苏农机与农艺,1997:
(2).
[9]朱云才,果蔬加工机械分类【J】,农机装备技术,2003,29
(2).
[10]王振择,摩擦去皮机的研制【J】,山西食品工业,1999,
(1).
[11]AdamsB,Processforenzymepeelingoffreshcitrusfruit,[patent],<
5000967>
1991//P.
[12]史建华,小型荔枝去皮机设计【J】,轻工机械,2005(4):
125—126.
[13]Dziesinski,AlanChester(Ossineke,MI,US)Patterson,RandyWilliam(Alpena,MI,US),Logpeelingapparatus[patent],<
6776202>
.2004(8).
[14]崔建云主编,食品加工机械与设备【M】.北京:
中国轻工业出版社2004.
[15]刘少达,朱立学,刘清生。
银杏(白果)脱壳机工作部件重要参数的分析【J】。
农机化研究,2005(3):
87~89。
5设计总结
了这次毕业设计我这几天真没休息好,我想有几点原因造成这种情况:
首先,由于第一次做毕业设计,开始几天很迷茫,不知道该如何下手。
其次是设计步骤太乱,想到一点做一点,造成前头的小错误给后头带来很大麻烦,比如,一开始我们对不完全齿轮认识不深,造成它的设计不够好,这给后面带来了很多麻烦!
认识错误,早期的认识错误使我走了不少弯路!
我所用的机构太繁造成之后的设计计算困难,通过这次设计,我对CAD这个软件有了更深的认识!
认识了很多新的命令。
在设计凸轮时遇到了一些问题,由于凸轮的造型比较复杂,再加上我需要其完成的工作比较艰巨,所以耽误了一些时间在凸轮上,但最后我通过各方面的修正,达到了预期的效果。
不过总的来说这个剥豆机还是比较完美的,首先我们通过查阅大量资料对剥豆机有了一个比较全面的了解,然后通过方案设计,给出了三种方案,最后通过方案的评定选出了一种方案最为最终设计方案;
接着对剥豆机的传动系统和传动系统的技术设计做了计算设计工作,最后对剥豆机的其它零部件也进行了较全面的设计。
当然因设计者的水平有限,其中也存在一些缺点,比如不完全齿轮实现的间歇送料和凸轮带动的挤压切皮动作很难实现协调,这个地方还需要很大改进。
对于最后对剥好蚕豆的收集我们在压辊的下方设有一个V型料斗,料斗的下方有一块斜板,剥好的蚕豆从压辊掉到料斗,并顺着料斗掉到斜板上,顺着斜板滑到箱体外。
在箱体的侧面开出一个方形的口子可以让豆子出来。
对于清扫机构,我们可以采取定期用手工清扫。
定期把箱盖揭开,用手把粘在压辊上的皮清理掉。
在压辊的表面可以度一层锯形的橡胶,一旦蚕豆接触压辊,就会被压辊吸出将其皮脱掉。
 升级会员
升级会员 