933自动控制原理题解Word文档格式.docx
《933自动控制原理题解Word文档格式.docx》由会员分享,可在线阅读,更多相关《933自动控制原理题解Word文档格式.docx(9页珍藏版)》请在冰豆网上搜索。
(2).G2()=0.25ss(答案不唯一)
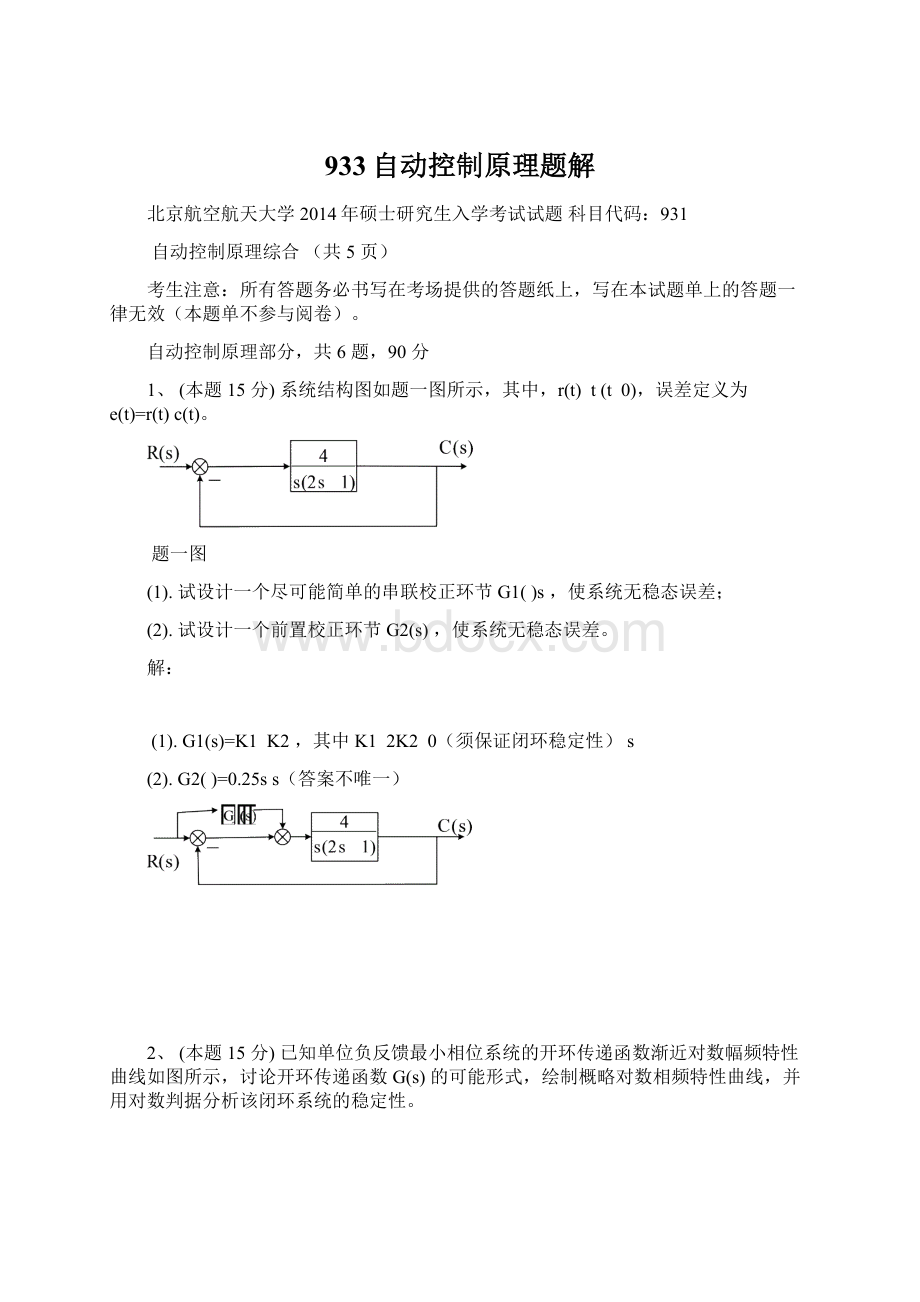
2、(本题15分)已知单位负反馈最小相位系统的开环传递函数渐近对数幅频特性曲线如图所示,讨论开环传递函数G(s)的可能形式,绘制概略对数相频特性曲线,并用对数判据分析该闭环系统的稳定性。
1000
G(s)=s
(s220s100),对数相频特性曲线如下图所示(需向上补画2)。
1
|G(10)|=j
。
若0.5,正负穿越都为0,稳定;
若00.5,不稳定。
2
3、(本题15分)单位负反馈系统的开环传递函数为
K*(s4)G(s)
s(s1)2
按步骤画出K*:
0时系统的根轨迹图,并确定系统的阶跃响应为振荡衰减过程时K*的取值范围。
1.
(1)三条根轨迹,起始于0,-1,-1,终止于-4,,。
(2)实轴上根轨迹(4,1)(1,0)
(3)渐近线a
2k21,k0,1,a1
(4)分离点坐标
211
d1dd4
解得d37
(5)与虚轴交点
j(j1)2K*(j4)0
解得2,K*1
2.将分离点坐标代入闭环特征方程可得相应的K*147370.0405。
因此,阶跃响应为振荡衰减过程时K*的取值范围为
(14737,1)
4、(本题15分。
第
(1)小题8分,第
(2)小题7分)非线性系统的结构图如题四图所示。
取变量c和c为相坐标,画出该系统的概略相轨迹。
并分析对任意初始条件,该系统的运动特点。
题四图
若c0,则cc1,dcc11
1dccc
若c0,则ccc,dccc1c
dccc
等倾线法绘制相轨迹图如下:
第931-2页
5、(本题15分)某电路如图五所示:
题五图
设u为控制输入,电感L两端的电压为y为输出,流入电阻R1和电容C2的电流分别为i1和i2。
(1).根据题五图画系统结构框图;
(2).若令R1R21、C1C21F、L1H,并令状态变量为x1uc1(电容C1两端的电压),
x2i2,x3y,试建立该系统的动态方程,并根据动态方程判断系统的可控性和可观测
性。
解:
(1)
(2)写动态方程:
根据结构图,可得
1x1
(ux1x2)x1ux1x2ss
x2
2s1x1x2x2x2x1ux1x2s
x3sx2x2x3
即
x1ux1x2
x2x3
x3ux12x2x3yx3
x1110x11
x2001x2+0u
x3121x31
x1
y001x2
x3
可控性矩阵
110
2b012rank(S)3
SbAbA
121
可控。
可观测性矩阵:
c001
VcA121rank()V3
cA2231
可观。
第931-3页
六、(本题15分)带有状态观测器的控制系统结构图如题六图所示:
题六图
其中,被控对象的传递函数为Gp(s)
s3。
s(s1)
(1).求Gp(s)的可观标准型实现,并在此基础上设计该系统的状态观测器,使观测器极点位于–5,–5;
(2).设计状态反馈律ukxˆv,使得由被控对象、状态观测器、状态反馈构成的闭环系统的传递函数为
Y(s)1
V(s)(s2)
这里,Y(s)和V(s)分别为y和v的拉普拉斯变换;
(3).判断由被控对象、状态观测器、状态反馈构成的闭环系统的可观测性。
(1)可观标准型实现
003
xxu
111y01x
h1
设Hh2,则
0h1025
AHc
11h2110
得h125,h211,观测器为
xˆ025xˆ3u25y
110111
(2)存在零极点对消,实际的期望极点为2,3,期望多项式为(s2)(s3)s25s6设kk1k2,
3k13k2
Abk1k11k2det[sI(Abk)]s2(13k1k2)s3k13k2,
13k1k253k13k26
解得k11,k23。
(3)闭环系统状态方程
xAbkxb
v
xˆHcAHcbkxˆb
00393
1113x1
v
025334xˆ3
0110131
xx
yc0xˆ0100xˆ
闭环系统可控性矩阵
31872252
1248
Srank()S2
1248不可控。
可观测性矩阵
0100
1113
Vrank(V)3
157161
5758957597
不可观。
第931-4页
 升级会员
升级会员 