自动控制直流电机测速反馈控制实验文档格式.docx
《自动控制直流电机测速反馈控制实验文档格式.docx》由会员分享,可在线阅读,更多相关《自动控制直流电机测速反馈控制实验文档格式.docx(8页珍藏版)》请在冰豆网上搜索。
电动机
被控量:
电动机的转速
四、实验思路
1、首先通过实验测定直流电动机转速模型的传递系数K、时间常数T,以获得电机转速的传递函数
。
2.然后对未校正的直流电机转速控制系统建立数学模型。
3.最后添加校正环节到控制系统,使电机转速达到预定转速
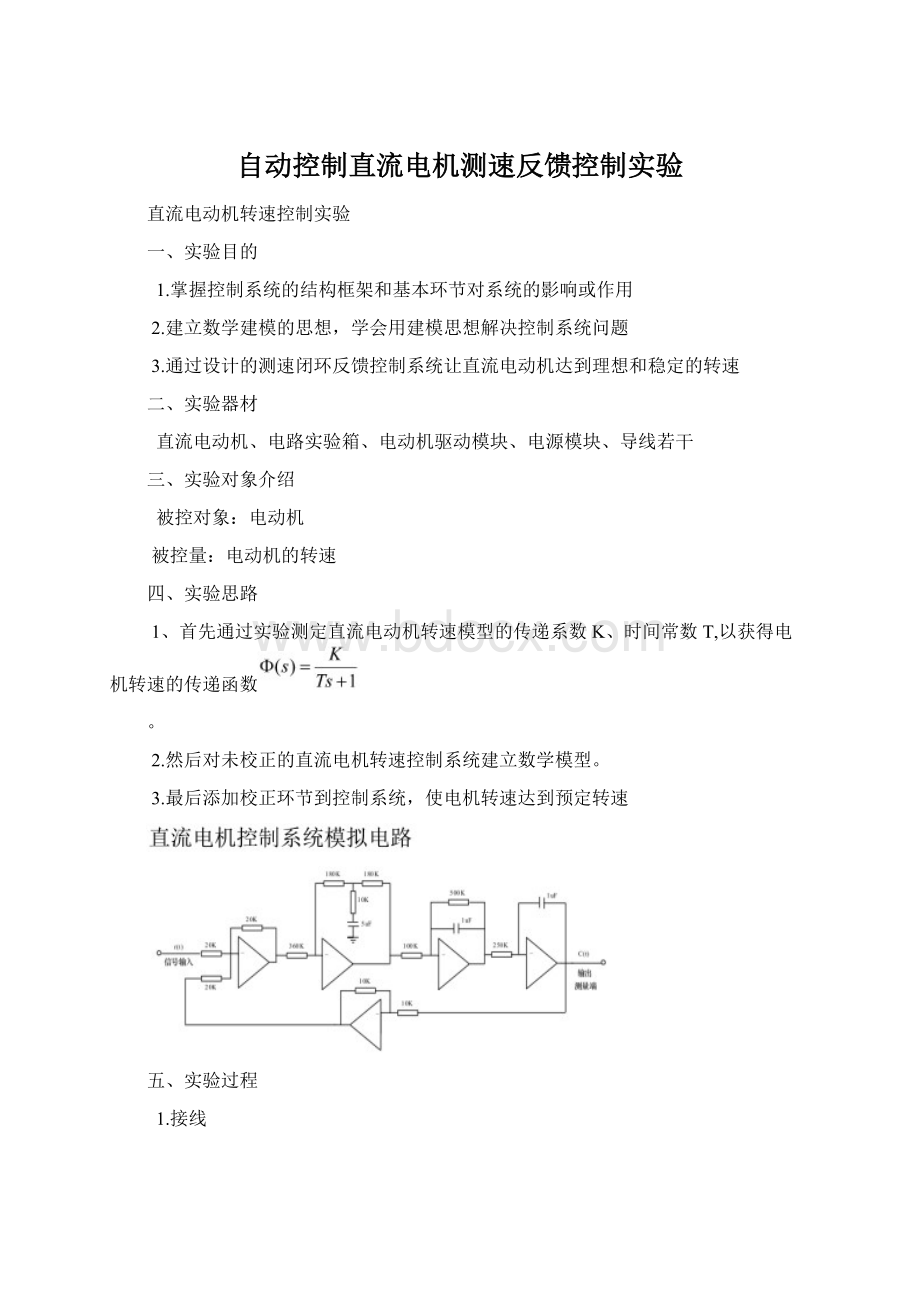
五、实验过程
1.接线
(1)电机:
粗线(红、黑端)接输入驱动模块的out+和out-,细线(红、黑端)接测速反馈;
(2)电源模块:
输出端v+、com(提供24V电压)分别接电动机驱动模块的电源输入端BAT+、GND;
(3)电动机驱动模块:
S1端接地,S2端接控制信号;
out+和out-为控制信号输出;
EN、COM两端短接,控制其工作使能;
(注:
若输出信号为负,短接DIR和COM)。
2.获取电机转速的传递函数
(1)电动机的传递函数为一阶系统,给控制系统加一个单位阶跃输入,测其输出响应。
但输出仿真波形中出现了大量高次噪声,所以需串联一个滤波环节。
(2)一阶积分环节具有滤除高频噪声的能力,同样二阶惯性环节也能滤除高频噪声,由于二阶惯性环节电路图比较复杂,所以选用一阶积分环节。
一阶环节的电路原理图如下:
(3)加入滤波环节后再对其加单位阶跃输入,测得其输出响应波形为
通过测试得到k=1.04,t=0.296,所以电机转速的传递函数为
3.系统性能测试
通过MATLAB软件得到系统的频率特性和时域特性,其MATLAB程序如下:
G=tf([1.04],[0.2961]);
t=0:
0.005:
5;
y=step(G,t);
r=1;
whiley(r)<
1.001;
r=r+1;
end;
rise_time=(r-1)*0.005
[ymax,tp]=max(y);
peak_time=(tp-1)*0.005
max_overshoot=ymax-1
s=1001;
whiley(s)>
0.98&
y(s)<
1.02;
s=s-1;
settling_time=(s-1)*0.005
由伯德图得时域特性:
相位裕量为164度,幅值裕量为无穷。
所以频率特性比较好。
时域特性为:
通过计算得此时系统稳态差ess=0.533,稳态误差较大,需加校正环节。
4.添加校正环节,建立电机转速模型
由于需要使调节时间变短,稳态误差变小,使用PID(比例-微分-积分)环节。
(1)比例-微分-积分环节
PID控制是根据系统的误差或者加上系统误差的变化率,利用比例、积分、微分计算出控制量进行控制。
电路原理图如下:
增到比例环节P项将加快系统的响应,其作用是放大误差的幅值,能快熟影响系统的控制输出。
过大的比例会使系统出现振荡,影响系统稳定性。
积分I项的作用是消除稳态,能对稳定后有累积误差的系统进行误差整理减小稳态误差。
微分F项具有超前作用,可以使系统的超调量减小,稳定性增加,减小动态误差。
(2)加校正建模仿真
加入校正环节后整个系统的原理图如下
其仿真的最理想结果如下:
由仿真结果得
(为P项增益),
(为微分项增益),
(为积分项增益).
所以校正环节的传递函数
六、实验结果
单位输入波形图为
其输入值为1.216V
输出波形图为:
其输出值为1.281
七、出现问题及解决方案
1.难以将所学的自动控制内容与实际的电机转速控制相结合。
需通过建立数学模型将其转化为控制问题
2..测取电机转速参数时出现高次噪声,采取添加高通滤波环节措施
3.没有经过MATLAB的仿真,想直接通过实际控制来得到校正后的理想效果。
这是一个错误的措施,因为实验室的直流电动机的额定电压为5v,不经仿真就直接对电动机进行控制极易因为电压过高而烧毁电机和实验设备,这是不容许的,所以实验中需注意这点。
另外,直接对电动机进行控制也极难的校正的最佳效果,还是得先经仿真测试,这样实际效果相对较好,也相对安全。
八、总结
通过本次实验设计,我们将理论与实践更好的联系起来,通过不断尝试校正,不断修改参数,我们从中掌握了PID校正的一般规律,并且加深了对理论知识的理解,因此收获很大。
经过本次自动控制原理实验的学习,我对MATLAB当中的SIMLINK有了全新的认识,那是一个用来对动态系统进行建模、仿真和分析的软件包。
同时通过课程的学习,复习了SIMLINK中的各个环节的操作,掌握了改变步长和算法的基本分析方法。
作为整个学习体系的有机组成部分,实验设计虽然安排比较紧,但并不具有绝对独立的意义。
运用学习成果,把课堂上学到得系统化的理论知识,尝试性地应用于实际设计工作,并从理论的高度对设计工作的现代化提出一些有针对性的建议和想法。
检验学习成果,看一看课堂学习与实际工作到得有多大距离,并通过综合分析,找出学习中存在的不足,以便为完善学习计划,改变学习内容与方法提供实际依据。
 升级会员
升级会员 