步进电机控制.docx
《步进电机控制.docx》由会员分享,可在线阅读,更多相关《步进电机控制.docx(32页珍藏版)》请在冰豆网上搜索。
步进电机控制
项目二、两相混合式步进电机的控制
一、目的
1、学会步进电机的使用方法。
2、了解并熟悉步进驱动器的应用。
二、器材
1、步进电机一台;
2、步进驱动器一台;
3、PLC主机一台(晶体管输出);
4、通讯线一条;
5、电脑一台;
6、导线若干。
三、知识衔接:
(一)、PLSY:
16位连续执行型脉冲输出指令
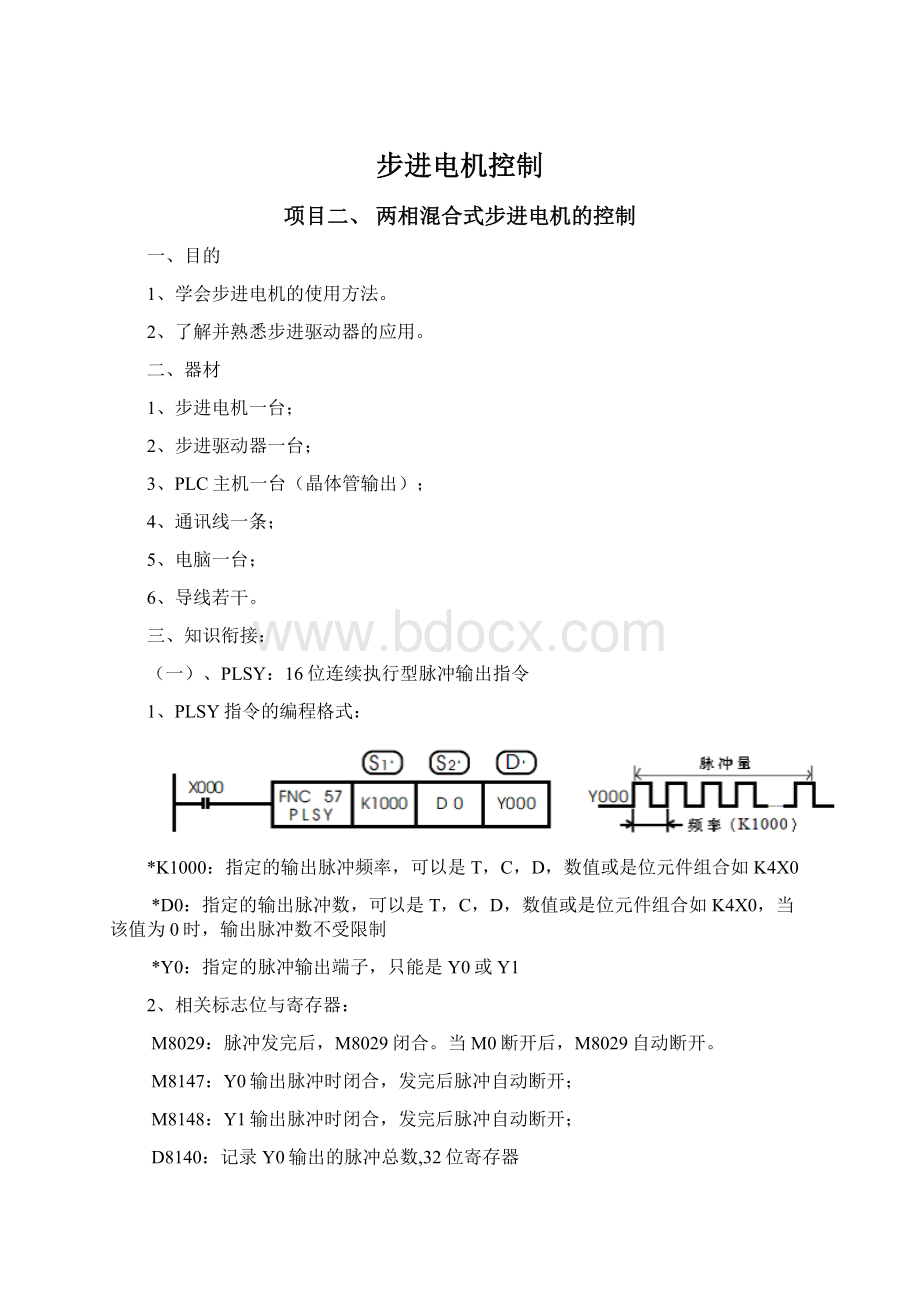
1、PLSY指令的编程格式:
*K1000:
指定的输出脉冲频率,可以是T,C,D,数值或是位元件组合如K4X0
*D0:
指定的输出脉冲数,可以是T,C,D,数值或是位元件组合如K4X0,当该值为0时,输出脉冲数不受限制
*Y0:
指定的脉冲输出端子,只能是Y0或Y1
2、相关标志位与寄存器:
M8029:
脉冲发完后,M8029闭合。
当M0断开后,M8029自动断开。
M8147:
Y0输出脉冲时闭合,发完后脉冲自动断开;
M8148:
Y1输出脉冲时闭合,发完后脉冲自动断开;
D8140:
记录Y0输出的脉冲总数,32位寄存器
D8142:
记录Y1输出的脉冲总数,32位寄存器
D8136:
记录Y0和Y1输出的脉冲总数,32位寄存器
注意:
PLSY指令断开,再次驱动PLSY指令时,必须在M8147或M8148断开一个扫描周期以上,否则发生运算错误!
(二)、步进电机42BYGH5403
表1-142BYGH5403型两相混合式步进电动机技术参数
型号
相数
步距角
(°)
电流(A)
静力矩
(Kg.cm)
定位力矩
(g.cm)
转动惯量
g•cm2
引线数
重量
g
42BYGH5403
2
1.8°
1.8
5.0
260
68
4
340
步进电动机A、B两相绕组的接线端如图1-1所示。
图1-1步进电动机接线端
(三)、步进电动机驱动器
1)驱动器型号为SH—20403,它是两相混合式步进电动机细分驱动器,它的特点是能适应较宽电压范围10V~40VDC(容量30VA),采用恒电流控制,它的电气性能如表1-2所示。
表1-2SH—20403型两相混合式步进电动机驱动器电气性能
供电电源
10V~40VDC(30VA)
输出电流
峰值3A/相(Max)(由面板拨码开关设定)
驱动方式
恒相电流PWM控制(H桥双极)
励磁方式
整步,半步,4、8、16、32、64细分(七种)
输入信号
(参见图6-1)
光电隔离,(共阳单脉冲接口),提供“0”信号
输入信号包括:
步进脉冲、方向变换和脱机保持等三个
2)步进电动机驱动器接线图
步进驱动器接线图如图1-2所示,输入接线口电路图1-3所示。
图1-2步进驱动器接线图
图1-3输入接口电路
3)输入信号说明:
①公共端:
本驱动器的输入信号采用共阳极接线方式,用户应将输入信号的电源正极连接到该端子上,将输入的控制信号连接到对应的信号端子上。
控制信号低电平有效,此时对应的内部光耦导通,控制信号输入驱动器中。
②脉冲信号输入:
共阳极时该脉冲信号下降沿被驱动器解释为一个有效脉冲,并驱动电机运行一步。
为了确保脉冲信号的可靠响应,共阳极时脉冲低电平的持续时间不应少于。
本驱动器的信号响应频率为70KHz,过高的输入频率将可能得不到正确响应。
③方向信号输入:
该端信号的高电平和低电平控制电机的两个转向。
共阳极时该端悬空被等效认为输入高电平。
控制电机转向时,应确保方向信号领先脉冲信号至少建立,可避免驱动器对脉冲的错误响应。
④脱机信号输入:
该端接受控制机输出的高/低电平信号,共阳极时低电平时电机相电流被切断,转子处于自由状态(脱机状态)。
共阳极时高电平或悬空时,转子处于锁定状态。
4)输出电流选择
输出电流选择见表1-2
5
6
7
5
6
7
5
6
7
5
6
7
ON
ON
ON
0.9A
ON
OFF
ON
1.5A
ON
ON
OFF
1.2A
ON
OFF
OFF
1.8A
OFF
ON
ON
2.1A
OFF
OFF
ON
2.7A
OFF
ON
OFF
2.4A
OFF
OFF
OFF
3A
5)细分等级选择
细分等级选择见表1-3
1
2
3
1
2
3
1
2
3
1
2
3
ON
ON
ON
保留
ON
OFF
ON
32细分
ON
ON
OFF
8细分
ON
OFF
OFF
半步
OFF
ON
ON
64细分
OFF
OFF
ON
16细分
OFF
ON
OFF
4细分
OFF
OFF
OFF
整步
四、项目过程
1、接线图如下所示;
2、调节驱动器的最大输出电流为1.8A;(说明:
电流的调节查看驱动器面板丝印上的白色方块对应开关的实际位置)
3、调节驱动器的细分为“1”;
4、接通电源,给PLC(控制机)灌写程序如下;
梯形图解释
当控制机的控制端X0闭合时,PLC在4s内给步进电机驱动器发射400个脉冲,电机正好转2周停止。
控制端X2是控制步进电机的旋转方向,控制端X1是复位PLC给驱动器发射脉冲。
五、项目拓展:
1、如果让步进电机旋转一圈半,如何来完成?
2、步进电机的转速为60转/分钟,如何实现?
实验四十八、两相混合式步进电机的力矩测量实训
一、训练目标
1、学会步进电机的使用方法。
2、了解并熟悉步进电机的力矩测量。
二、训练器材
1、步进电机一台;
2、步进驱动器一台;
3、PLC主机一台(晶体管输出);
4、计算机一台;
5、编程下载线一条;
6、导线若干;
7、弹簧秤组件一套。
三、实验电路与工作原理
1、步进电动机
1)步进电动机是将输入的电脉冲信号转换成角位移的特殊同步电动机,它的特点时每输入一个电脉冲,电动机转子便转动一步,转一步的角度称为步距角,步距角愈小,表明电机控制的精度愈高。
由于转子的角位移与输入的电脉冲个数成正比,因此电动机转子转动的速度便与电脉冲频率成正比。
改变通电频率,即可改变转速。
改动电机各相绕组通电的顺序(即相序)即可改变电动机的转向。
如果不改变绕组通电的状态,步进电动机还具有自锁能力(即能抵御负载的波动,而保持位置不变),而且从理论上说其步距误差也不会积累。
因此步进电动机主要用于开环控制系统的进给驱动。
步进电动机的主要缺点是在大负载和高转速情况下,会产生失步,同时输出的功率也不够大。
2)步进电动机按工作原理分类由可分为磁阻式(即反应式)、永磁式和混合式(兼有永磁和磁阻)三种。
按绕组相数又可分为两、三、四、五等不同的相数,按电压等级又可分为24V、30V、80V、80V/12V、80V/18V等。
(工作原理可参见附录I)
3)本实验采用的步进电动机为两相混合式步进电动机,电压为10~40V。
其型号为35BYG250[其中35(mm)—机座尺寸,BYG—为混合式,2—两相,50—转子齿数],其技术参数如表48-1所示
表48-135BYG250型两相混合式步进电动机技术参数
型号
相数
步距角
(°)
静态相
电流(A)
相电阻
(Ω)
相电感
(mH)
保持
转矩
(mN•m)
定位
转矩
(mN•m)
转动
惯量
g•cm2
重量
kg
35BYG250
2
1.8
0.8
5.7
7
110
12
14
0.18
4)步进电动机A、B两相绕组的接线端如图48-2所示。
图48-2步进电动机接线端
2、步进电动机驱动器
1)驱动器型号为SH—20403,它是两相混合式步进电动机细分驱动器,它的特点是能适应较宽电压范围10V~40VDC(容量30VA),采用恒电流控制,它的电气性能如表48-3所示。
表48-3SH—20403型两相混合式步进电动机驱动器电气性能
供电电源
10V~40VDC(30VA)
输出电流
峰值3A/相(Max)(由面板拨码开关设定)
驱动方式
恒相电流PWM控制(H桥双极)
励磁方式
整步,半步,4、8、16、32、64细分(七种)
输入信号
(参见图6-1)
光电隔离,(共阳单脉冲接口),提供“0”信号
输入信号包括:
步进脉冲、方向变换和脱机保持等三个
2)步进电动机驱动器接线图
步进驱动器接线图如图48-4所示。
图48-4步进驱动器接线图
3)输入信号说明:
①公共端:
本驱动器的输入信号采用共阳极接线方式,用户应将输入信号的电源正极连接到该端子上,将输入的控制信号连接到对应的信号端子上。
控制信号低电平有效,此时对应的内部光耦导通,控制信号输入驱动器中。
②脉冲信号输入:
共阳极时该脉冲信号下降沿被驱动器解释为一个有效脉冲,并驱动电机运行一步。
为了确保脉冲信号的可靠响应,共阳极时脉冲低电平的持续时间不应少于。
本驱动器的信号响应频率为70KHz,过高的输入频率将可能得不到正确响应。
③方向信号输入:
该端信号的高电平和低电平控制电机的两个转向。
共阳极时该端悬空被等效认为输入高电平。
控制电机转向时,应确保方向信号领先脉冲信号至少建立,可避免驱动器对脉冲的错误响应。
④脱机信号输入:
该端接受控制机输出的高/低电平信号,共阳极时低电平时电机相电流被切断,转子处于自由状态(脱机状态)。
共阳极时高电平或悬空时,转子处于锁定状态。
4)输出电流选择
输出电流选择见表6-2
5
6
7
5
6
7
5
6
7
5
6
7
ON
ON
ON
0.5A
ON
OFF
ON
0.7A
ON
ON
OFF
0.6A
ON
OFF
OFF
0.9A
OFF
ON
ON
1.0A
OFF
OFF
ON
1.3A
OFF
ON
OFF
1.2A
OFF
OFF
OFF
1.5A
5)细分等级选择
细分等级选择见表6-3
1
2
3
1
2
3
1
2
3
1
2
3
ON
ON
ON
保留
ON
OFF
ON
32细分
ON
ON
OFF
8细分
ON
OFF
OFF
半步
OFF
ON
ON
64细分
OFF
OFF
ON
16细分
OFF
ON
OFF
4细分
OFF
OFF
OFF
整步
四、实验内容与实验步骤
1、将步进电动机的A、B两相绕组与驱动器的输出A+A-及B+B-正确相联。
参见图6-2及图6-1。
2、正确选择输出电流。
如表6-2所示,步进电动机的相电流为0.8A<0.9A,所以在表6-2中选:
5→0N,6→0FF,7→0FF。
3、正确选择脉冲步数。
因此在表6-3中,如今选1整步/脉冲,选择1→OFF,2→OFF及3→OFF。
(步骤2,3已选定,学员进行校对验证即可)
4、灌入48-1所示的程序;
4、将脉冲输入信号X0置“1”。
5、将方向输入信号X2置“0”;
6、观察电机的运转;
7、将方向输入信号X2置“1”;
8、观察电机的转向。
9、通过调节设备中的弹簧秤来给电机施加外力从而进行测力F;
10、L为步进电机
 升级会员
升级会员 