单片机原理与应用 王洪君 部分习题参考解答Word格式.docx
《单片机原理与应用 王洪君 部分习题参考解答Word格式.docx》由会员分享,可在线阅读,更多相关《单片机原理与应用 王洪君 部分习题参考解答Word格式.docx(21页珍藏版)》请在冰豆网上搜索。
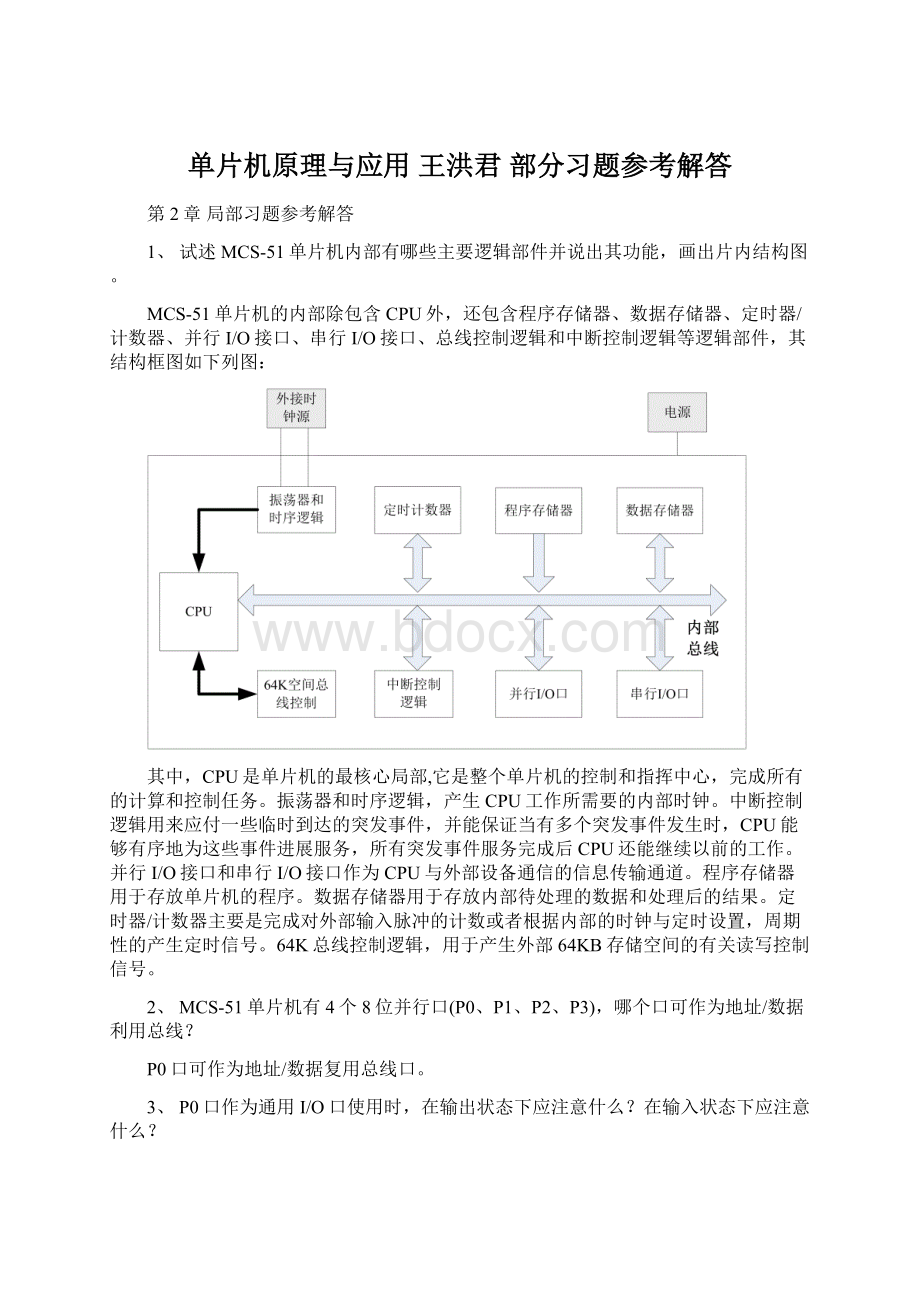
D3
D2
D1
D0
Cy
AC
F0
RS1
RS0
OV
-
P
其中,各位的含义如下:
✧Cy:
高位进位标志位,当ALU的算术运算过程中有进位或借位时,Cy=1;
否如此,Cy=0。
同时,该位还可以用作位累加器,这时一般只用“C〞表示。
✧AC:
辅助进位标志,当ALU的算术运算过程中低4位向高4位有进位或借位时,AC=1;
否如此,AC=0。
该位常用于BCD码的调整。
✧F0:
用户标志位。
✧RS1、RS0:
选择工作存放器组位,用于选择内部数据存储器区内4组工作存放器中的某一组。
具体选择情况见存放器介绍局部。
✧OV:
溢出标志位,当ALU的算术运算过程中有溢出时,OV=1;
否如此,OV=0。
✧P:
奇偶校验标志位,根据累加器ACC中1的个数由硬件置位或去除,当累加器ACC中有奇数个1时P=1;
否如此,P=0。
✧PSW.1:
保存位,无定义。
11、在MCS-51单片机的工作时序中,一个机器周期包含几个状态周期、几个振荡周期?
一个机器周期包含6个状态周期、12个振荡周期。
12、单片机复位后,程序计数器PC指向哪个地址?
PC=0000H
第3章局部习题参考解答
1、写出MCS-51单片机汇编指令的指令格式,并简单举例。
MCS-51单片机的汇编指令格式如下:
[标号:
]操作码[目的操作数][,源操作数][;
注释]
操作码表示该指令所实现的操作功能,一般由2~5个英文字母表示。
例如ORL,ADD,LCALL等。
操作数表示参与操作的数据来源和目的单元。
操作数可以是一个立即数,也可以是一个内存单元或者是一个存放器单元。
操作码和第一个操作数之间一般用一个或几个空格隔开,而操作数与操作数之间用逗号隔开。
操作数可以有1个,2个,3个或没有。
如果需要对指令进展注释说明的话,在最后一个操作数后加一个分号,分号后面是注释。
如:
MOVA,60H;
(60H)→A
标号由1~8个字母或数字构成,以字母开头以“:
〞结尾,标号可有可无,它仅仅代表了该指令所在的地址,便于源程序编写过程中使用该地址。
2、指出下面程序每个语句的寻址方式。
目的操作数原操作数
MOVA,P1存放器寻址直接寻址
MOVA,#40H存放器寻址立即寻址
MOV80H,A直接寻址存放器寻址
MOVA,R5存放器寻址存放器寻址
MOVR0,A存放器间接寻址存放器寻址
MOVXA,DPTR存放器寻址存放器间接寻址
MOVCA,A+DPTR存放器寻址基址+变址寻址
MOV74H,#80H直接寻址立即寻址
3、写出下面程序被执行后,各数据存储器地址中的内容。
MOV40H,#33H
MOV41H,#44H
MOVA,40H
MOV50H,A
MOVA,41H
MOV51H,A
〔40H〕=33H,〔41H〕=44H,〔50H〕=33H,〔51H〕=44H
4、设置堆栈指针SP中内容为60H,编写程序,将上题中数据存储器50H、51H的内容压栈后,分别将栈内数据弹出到DPTR存放器中。
MOVSP,#60H
PUSH50H
PUSH51H
POPDPL
POPDPH
5、访问片内、外数据存储器,都用什么指令?
访问片内数据存储器的数据传送指令用MOV,访问片外数据存储器的数据传送指令用MOVX。
6、下面的指令语句对吗?
为什么?
MOVR0,#0400H;
不对,R0是8位存放器源操作数超过了8位
MOV100H,A;
不对,片内数据存储器用8位地址访问,目的操作数的地址超过了8位。
MOVR2,A;
不对,能够用于间接寻址的只能是R0或R1
MOVXR1,A;
对,R1做为间址存放器来提供寻址存储器的低8位,高8位由P2提供
7、查表指令MOVCA,A+DPTR所查的表数据是在程序存储区还是数据存储区?
程序存储区。
9、使用位操作指令完成如下操作。
⑴将P1.1置“1”。
⑵将ACC.7置“1”。
10、编写程序,将40H为首的8个单元内容,依次反序送入到60H为首的8个单元中去。
MOVR0,#47H;
40H开始的8字节数据中最后一个单元的地址
MOVR1,#60H
MOVR2,#8
LOOP:
MOVA,R0
MOVR1,A
DECR0
INCR1
DJNZR2,LOOP
SJMP$
11、两个四位压缩类型BCD码数,被加数放在30H和31H内存单元中,加数放在32H和33H内存单元中,所求的和放在34H和35H中。
位数排列按高位在低地址,低位在高地址的顺序,编写此加法程序。
MOVPSW,#00H;
取0组工作存放器
MOVR0,#31H
MOVR1,#33H
SETBRS0;
取1组工作存放器
MOVR0,#35H
CLRRS0
MOVR2,#02H
CLRC;
去除进位标志,准备进展带进位加
MOVA,R0
ADDCA,R1
DAA
MOVR0,A
DECR0
CLRRS0;
恢复0组工作存放器
DECR1
DJNZR2,LOOP
SJMP$
13、写出ACALL和LCALL两个调用指令的调用X围,试写出这两条指令执行时,CPU的操作过程。
ACALL的调用X围是包括调用指令下一条指令的第一个字节所在的2KBX围的程序存储器空间。
ACALL调用指令的执行过程是:
PC加2〔本指令代码为两个字节〕获得下一条指令的地址,并把该断点地址〔当前的PC值〕入栈,然后将断点地址的高五位与11位目标地址〔指令代码第一字节的高3位,以与第二字节的八位〕连接构成16位的子程序入口地址,使程序转向子程序。
调用子程序的入口地址和ACALL指令的下一条指令的地址,其高五位必须一样。
因此子程序的入口地址和ACALL指令下一条指令的第一个字节必须在同一个2KBX围的程序存储器空间内。
LCALL调用指令的目标地址以16位给出,允许子程序放在64KB空间的任何地方。
指令的执行过程是把PC加上本指令代码数〔三个字节〕获得下一条指令的地址,并把该断点地址入栈〔断点地址保护〕,接着将被调子程序的入口地址〔16位目标地址〕装入PC,然后从该入口地址开始执行子程序。
14、分析如下程序,说出此程序完成什么样的功能。
MOVP1,#0FFH
MOVR7,#03H;
该指令1个机器周期 1
LOOP1:
MOVR6,#0FFH;
该指令1个机器周期 2
DJNZR6,$;
该指令2个机器周期 3
DJNZR7,LOOP1;
该指令2个机器周期 4
CPLP1.0;
该指令1个机器周期 5
JMPLOOP;
该指令2个机器周期 6
END
该程序的功能是从P1.0引脚输出连续方波,方波的周期为〔11+〔12+23×
255+24〕×
3+15+26〕×
2个机器周期
15、试编写程序,完成对十个数从大到小的排序〔建议用气泡排序法〕。
十个源字节数据放在30H为首的内存区域,排序后的目标数据放在50H为首的区域。
如果不破坏30H开始存放的源字节数据,可以把从30H开始的数据先传送到50H开始的数据区,然后对50H开始的数据进展排序。
如果不需考虑30H开始存放的数据使用后的顺序,如此可先对30H开始存放的数据进展排序,然后再传送到50H开始的数据区中。
现根据第1种情况进展编程。
MOVR0,#30H
MOVR1,#50H
MOVR2,#10
LOP1:
MOVR1,A
INCR0
INCR1
DJNZR2,LOP1
MOVR2,#9
LOP4:
MOVR0,#50H
MOVR1,#51H
MOVA,R2
MOVR3,A
LOP3:
CLRC
SUBBA,R1
LOP2:
JCNEXT
MOVA,R0
XCHA,R1
MOVR0,A
NEXT:
INCR0
DJNZR3,LOP3
DJNZR2,LOP4
第4章局部习题参考解答
1、MCS-51单片机中,有几个16位定时/计数器?
其实际用途?
MCS-51单片机中,有2个16位定时/计数器。
可以用定时器在规定的时间对温度、湿度、流量、转速等参数进展检测采样,用于环境检测、工业控制;
或者利用定时器按一定的周期产生方波信号进展输出;
还可以通过计数器对脉冲进展计数,用于信息的采集处理领域等。
2、通过对定时/计数器中的哪个特殊存放器进展工作模式设置?
试表示几种工作模式功能。
通过特殊存放器TMOD对定时/计数器进展工作模式设置。
工作方式0,为13位的定时/计数器。
工作方式1,为16位定时器/计数器。
工作方式2,为8位自动重装定时器/计数器。
工作方式3,只有定时器/计数器T0具有此工作方式,为两个8位定时器/计数器。
3、门控制信号GATE为1时,外部中断引脚INTx在什么状态下启动计数?
GATE为1时,在外部中断引脚INTx=1、TRx=1时启动定时器/计数器。
5、定时/计数器作为计数器时,对外界技术频率有什么要求〔假定时钟频率为12MHz〕?
当定时/计数器设置为计数工作方式时,计数器对来自输入引脚T0和T1的外部脉冲信号计数,在每个机器周期的S5P2期间采样外部脉冲,假如前一个机器周期采样到高电平,后一个机器周期采样到低电平,如此将触发计数器加1,更新的计数值将在下一个机器周期的S3P1期间装入计数器。
因此,单片机检测一个从高电平到低电平的下降沿需要2个机器周期,要使下降沿能被检测到,需要保证被采样高、低电平至少维持一个机器周期的时间,即外部输入信号的频率不超过晶振频率的1/24。
当晶振频率为12MHz时,最高计数频率不超过0.5MHz,即计数脉冲的周期要大于2微秒。
6、定时/计数器在何种设置下可提供3个8位定时器?
当T0运行在模式3下,TH0作为定时器使用时,其启动和关闭受谁的控制?
定时器/计数器T0工作在方式3下,定时器/计数器T1工作在方式2下,可提供3个8位定时器。
当T0运行在方式3下,TH0作为定时器使用时,其启动和关闭受TR1的控制。
7、当定时/计数器T0被设置为模式3时,怎样使T1启动运行?
又怎样使其停止运行?
当定时/计数器T0被设置为模式3时,定时/计数器T1只要设置好工作方式、时间常数初值,然后用控制位C/T切换其为定时或计数功能就可以使T1运行,假如想停止它的运行,只要把它的工作方式设置为方式3即可,因为定时器T1没有方式3,将它设置为方式3就使它停止工作。
8、时钟频率为12MHz。
要求定时值分别为:
0.1ms、1ms、10ms;
定时/计数器T0分别工作在模式0、模式1、模式2,其定时初值各为多少?
方式0时,0.1ms定时的计数值为100,时间常数初值为:
TH0=0FCH,TL0=1CH
方式0时,1ms定时的计数值为1000,时间常数初值为:
TH0=0E0H,TL0=18H
方式1时,0.1ms定时的计数值为100,时间常数初值为:
TH0=0FFH,TL0=9CH
方式1时,1ms定时的计数值为1000,时间常数初值为:
TH0=0FCH,TL0=18H
方式1时,10ms定时的计数值为10000,时间常数初值为:
TH0=0D8H,TL0=0F0H
方式2时,0.1ms定时的计数值为100,时间常数初值为:
TH0=9CH,TL0=9CH
9、时钟频率为12MHz。
编写程序完成从P1.0输出占空比为1:
4,频率为1000Hz的脉冲波型。
1000Hz周期为1ms,如此高电平持续时间为1ms/4=0.25ms=250us。
用T0实现250um定时,采用工作方式2,定时时间常数为256-250=6。
从P1.0输出占空比为1:
4,频率为1000Hz的脉冲波型,既P1.0持续250us的高电平,250us×
3的低电平。
采用查询方式实现:
MOVTMOD,#02H
MOVTH0,#06H
MOVTL0,#06H
SETBTR0
JNBTF0,$
CLRTF0
MOVR0,#03H
CLRTF0
DJNZR0,LOP1
JMPLOP2
采用中断方式实现:
ORG0000H
LJMPMAIN
ORG000BH
LJMPT0S
ORG0030H
MAIN:
MOVSP,#60H
MOVTMOD,#02H
MOVIE,#82H
T0S:
JNBP1.0,T01
SJMPEXIT
T01:
DJNZR0,EXIT
EXIT:
RETI
10、编写程序。
时钟频率为12MHz,使用T1,由P1.0、P1.1分别输出周期为500μs和2ms的方波。
用T1实现250um定时,采用工作方式2,定时时间常数为256-250=6。
P1.0每250us改变状态一次,P1.1每250us×
4改变状态一次。
ORG001BH
LJMPT1S
MOVTMOD,#20H
MOVIE,#88H
MOVR0,#04H
MOVTH1,#06H
MOVTL1,#06H
SETBTR1
SJMP$
DJNZR0,EXIT
MOVR0,#04H
15、半双工通信和全双工通信的区别?
半双工是指数据传输可以沿两个方向,但需要分时进展。
全双工是指数据可以同时进展双向传输。
16、使用哪个特殊功能存放器来确定串行口的工作方式?
MCS-51单片机串行口有几种工作方式?
各工作方式的波特率如何确定?
SCON用来设定串行口的工作方式、接收/发送控制以与设置状态标志;
MCS-51单片机串行口有4种工作方式。
方式0的波特率由振荡器的频率所确定,波特率为fosc/12;
方式2时的波特率由振荡器的频率〔fosc〕和SMOD位所确定,即:
方式1和3时的波特率由定时器T1和T2的溢出率和SMOD所确定。
17、晶振为11.059MHz,工作于方式1,波特率为1200b/s,用定时器/计数器T1作为波特率发生器,写出其方式字和计数初值。
T1工作在方式2下,其方式字为20H
由串行口方式1的
,取SMOD=0,可计算出T1的溢出率=38400。
如此T1的计数值为11.0592/〔38400×
12〕=24,T1的初值为232或0E8H。
18、串行口按工作方式1进展串行数据通信。
晶振为11.059MHz,波特率为4800b/s,请编写具有收发功能的串口通信程序〔两种接收方式〕:
a、以查询方式接收数据。
b、以中断方式接收数据。
将接收数据放到30H为首的片内存储区中。
设T1工作在方式2下,其方式字为20H
,取SMOD=0,可计算出T1的溢出率=153600。
如此T1的计数值为11.0592/〔153600×
12〕=6,T1的初值为250或0FAH。
二者之间的通信约定如下:
(1)当1号机发送时,先发送一个0E1H联络信号,2号机收到后回答一个0E2H应答信号,表示同意接收。
(2)当1号机收到应答信号0E2H后,开始发送数据,每发送一个数据字节都计算校验和,假定数据块长度为16个字节,一个数据块发送完毕后立即发送校验和。
(3)2号机接收数据并转存到数据缓冲区,每接收到一个数据字节便计算一次校验和,当收到一个数据块后,再接收1号机发来的校验和,并将它与2号机求出的校验和进展比拟。
假如两者相等,说明接收正确,2号机回答00H;
假如两者不相等,说明接收不正确,2号机回答0FFH,请求重发。
(4)1号机接到00H后完毕发送。
假如收到的答复非零,如此重新发送数据一次。
1号机程序清单如下:
ASTART:
MOVTMOD,#20H;
定时器1置为方式2
MOVTH1,#0FAH;
装载定时器初值,波特率4800
MOVTL1,#0FAH
MOVPCON,#00H
SETBTR1;
启动定时器
MOVSCON,#50H;
设定串口方式1,且准备接收应答信号
ALOOP1:
MOVSBUF,#0E1H;
发联络信号
JNBTI,$;
等待一帧发送完毕
CLRTI;
允许再发送
JNBRI,$;
等待2号机的应答信号
CLRRI;
允许再接收
MOVA,SBUF;
2号机应答后,读至A
XRLA,#0E2H;
判断2号机是否准备完毕
JNZALOOP1;
2号机未准备好,继续联络
ALOOP2:
MOVR0,#30H;
2号机准备好,设定数据块地址指针初值
MOVR7,#10H;
设定数据块长度初值
MOVR6,#00H;
清校验和单元
ALOOP3:
MOVSBUF,R0;
发送一个数据字节
MOVA,R6
ADDA,R0;
求校验和
MOVR6,A;
保存校验和
INCR0
JNBTI,$
CLRTI
DJNZR7,ALOOP3;
整个数据块是否发送完毕
MOVSBUF,R6;
发送校验和
CLRRI
MOVA,SBUF;
2号机应答,读至A
JNZALOOP2;
2号机应答“错误〞,转重新发送
RET;
2号机应答“正确〞,返回
2号机接收程序清单如下:
BSTART:
MOVTMOD,#20H
MOVTH1,#0FAH
SETBTR1
设定串口方式1,且准备接收
BLOOP2:
JNBRI,$;
等待1号机的联络信号
MOVA,SBUF;
收到1号机信号
XRLA,#0E1H;
判是否为1号机联络信号
JZBLOOP1;
是1号机联络信号,准备接收数据
MOVSBUF,#0FFH;
不是1号机联络信号,回送错误标志
SJMPBLOOP2
BLOOP1:
MOVSBUF,#0E2H;
是1号机联络信号,发应答信号
MOVR0,#30H;
设定数据块地址指针初值
MOVR7,#10H;
MOVR6,#00H;
BLOOP3:
JNBRI,$
MOVA,SBUF
MOVR0,A;
接收数据转储
ADDA,R6;
MOVR6,A
DJNZR7,BLOOP3;
判数据块是否接收完毕
完毕,接收1号机发来的校验和
XRLA,R6;
比拟校验和
JNZERROR;
校验和不相等,跳至发错误标志
MOVSBUF,#00H;
校验和相等,发正确标志
SJMPEND1
ERROR:
M
 升级会员
升级会员 