气动执行机构的几种控制方法Word格式文档下载.docx
《气动执行机构的几种控制方法Word格式文档下载.docx》由会员分享,可在线阅读,更多相关《气动执行机构的几种控制方法Word格式文档下载.docx(23页珍藏版)》请在冰豆网上搜索。
X5045提供了三个时间值供用户选择使用。
它所具有的电压监控功能还可以保护系统免受低电压的影响,当电源电压降到允许范围以下时,系统将复位,直到电源电压返回到稳定值为止。
X5045的存储器与CPU可通过串行通信方式接口。
共4069位,可以按512×
8个字节来放置数据。
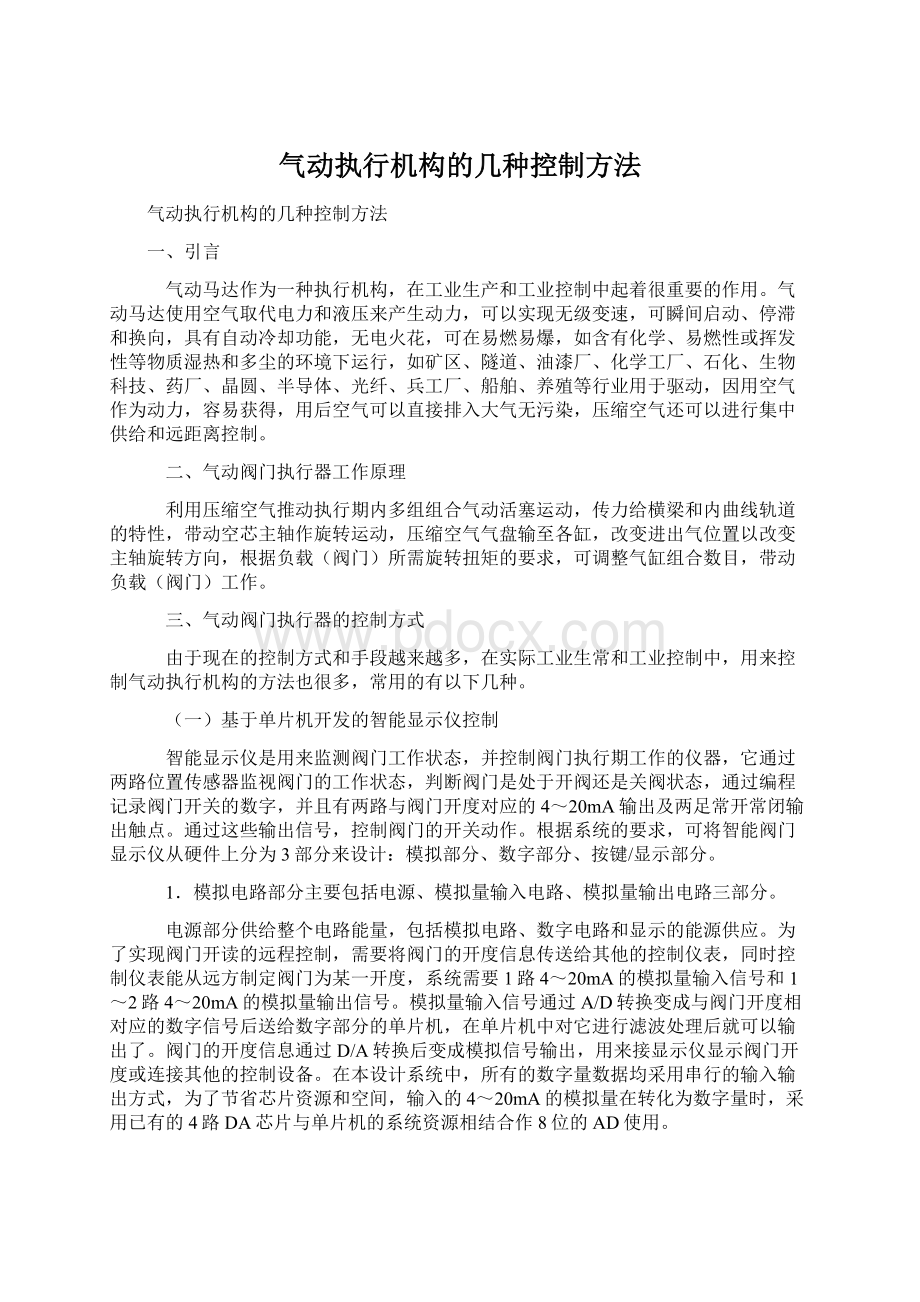
图1
X5045的管脚排列如图1所示,它共有8个引脚,各个引脚的功能如下:
∙CS:
电路选择端,低电平有效;
∙SO:
串行数据输出端;
∙SI:
串行数据输入端;
∙SCK:
串行时钟输出端;
∙WP:
写保护输入端,低电平有效;
∙RESET:
复位输出端;
∙Vcc:
电源端;
∙Vss:
接地端。
检测脉冲输入信号电路如图2所示。
图2
图2为一路检测脉冲输入信号电路(另一路完全相同)。
INA为输入信号,是由光电传感器采集到的阀门脉冲信号(>
10mA)。
该信号经旁路电容滤波后送入光耦,转换成了输出的OUT电压信号送入单片机。
输出的电压可直接进入单片机的I/O口。
在控制中,要求A、B两路脉冲都接收到的时候,才认为是由信号输入,AB为正转,BA为反转。
只有一路信号输入时不计数。
两路常开、常闭转换触点输出。
用来连接电磁阀,通过控制电磁阀的吸合来控制气动执行机构作相应的开阀或关阀动作。
3.显示部分主要包括:
单片机、4位LED显示、3只状态指示灯(自动、正转、反转)、3只按键(MODE/SET键、上键、下键)。
显示部分采用AT89C4051单片机,用来控制4位LED显示,且同数字部分的单片机进行通讯,还要对控制仪的模式做相应的选择和控制。
显示仪上设计有3只状态指示灯用来显示执行机构的状态:
正转、反转、自动;
3只按键:
MODE/SET键、上键、下键,控制执行机构的工作模式和一些参数的初始化。
这3部分通过接口连接,构成一个完整的控制系统,可以对一些类似气动马达等的执行机构进行控制。
在实际应用中基本实现了预先要求的各种性能指标。
(二)利用PLC来控制的系统
PLC在控制系统中的应用越来越广泛,由于本方案是在OMRON的PLC上面作的开发,所以以OMRON的PLC来作介绍。
硬件组成:
1台计算机,1套PLC(包括CPU,I/O模块,ID212,OC224,AD003模块),2个继电器,2个电磁阀,1个气动阀门执行器。
其组成原理为:
由PC机通过RS-232串口通讯连接OMRON的PLC,对PLC进行编程和监控。
PLC的I/O模块分别接入输入、输出信号,其中输入模块连接到阀门上的两个位置传感器,通过PLC的输入模块ID211的指示灯亮的先后顺序来显示阀门的开关状态。
输入模块接收两路阀门检测脉冲输入,即脉冲A与脉冲B。
在运行状态下,脉冲A输入时指示灯A亮,脉冲B输入时指示灯B亮。
输入顺序为AB,表示开阀。
输入顺序为BA表示关阀。
阀门检测脉冲A和B信号必须部分叠加,否则不能正常检测阀门开度。
通过PLC的输出模块OC225控制两个继电器,继电器具有两组常开常闭输出触点,1组为开阀输出触点,1组为关阀输出触点。
开阀时,当阀门开度大于或等于所设阀门限位值时开阀输出触点动作,阀门开度小于所设阀门限位值时开阀输出触点动作,发明开度小于所设阀门限位值时开阀输出触点复位。
关阀时,当阀门关到零位且21s内无脉冲输入时关阀输出触点动作;
若21s内有脉冲输入,则延时21s关阀输出触点动作。
通过继电器的吸合来控制两个电磁阀的开关,电磁阀打开后,便可以控制气动阀门执行器使得阀门做相应的开阀或关阀动作。
同时接近传感器把阀门的开关情况再传送到PLC中,并同要求的阀门开度作比较,直到符合要求为止。
自动归零与自动调满:
控制系统具有自动归零与自动调满功能,当阀门开度小于归零范围值或阀门开度距满量程小于满度调节范围值,且时间大于或等于所设值稳定时间值时,PLC自动控制阀门进行归零或自动调满。
在实验中,由阀门上的位置传感器计算阀门的开度。
当阀门先离开A传感器,后离开B传感器时,表示阀门在关阀。
当阀门先离开B传感器,后离开A传感器时,表示阀门在开阀。
传感器接收到的是一个脉冲信号,通过位置传感器的采集信号来记下阀门的开关状态。
记录开阀和关阀脉冲的本分梯形图如图3所示。
图3
在上位机中用编程软件CX-programmer编写梯形图,然后把梯形图下载到PLC中运行,在上位机的组态软件中进行控制和监控,阀门开关量的多少可由组态软件界面输入的圈数值确定。
组态界面做好后,开阀、关阀、停止、总开关等控件的控制和动作可以直接在组态界面中很直观形象地进行操作。
四、结束语
前面介绍的两种气动马达的控制方法,已经用于一些石油化工厂的生产控制过程,并且实现了预期的要求功能控制,单片机开发的系统结构简单,控制方便。
用PLC开发的控制系统,初期投资比较大,但其在稳定性和控制精度等方面比起单片机的开发系统来说要好一些。
三相异步电动机绕组故障分析和处理
发表时间:
2006-12-15
来源:
中国机电维修网
绕组是电动机的组成部分,老化,受潮、受热、受侵蚀、异物侵入、外力的冲击都会造成对绕组的伤害,电机过载、欠电压、过电压,缺相运行也能引起绕组故障。
绕组故障一般分为绕组接地、短路、开路、接线错误。
现在分别说明故障现象、产生的原因及检查方法。
一、绕组接地
指绕组与贴心或与机壳绝缘破坏而造成的接地。
1.故障现象
机壳带电、控制线路失控、绕组短路发热,致使电动机无法正常运行。
2.产生原因
绕组受潮使绝缘电阻下降;
电动机长期过载运行;
有害气体腐蚀;
金属异物侵入绕组内部损坏绝缘;
重绕定子绕组时绝缘损坏碰铁心;
绕组端部碰端盖机座;
定、转子磨擦引起绝缘灼伤;
引出线绝缘损坏与壳体相碰;
过电压(如雷击)使绝缘击穿。
3.检查方法
(1)观察法。
通过目测绕组端部及线槽内绝缘物观察有无损伤和焦黑的痕迹,如有就是接地点。
(2)万用表检查法。
用万用表低阻档检查,读书很小,则为接地。
(3)兆欧表法。
根据不同的等级选用不同的兆欧表测量每组电阻的绝缘电阻,若读数为零,则表示该项绕组接地,但对电机绝缘受潮或因事故而击穿,需依据经验判定,一般说来指针在“0”处摇摆不定时,可认为其具有一定的电阻值。
(4)试灯法。
如果试灯亮,说明绕组接地,若发现某处伴有火花或冒烟,则该处为绕组接地故障点。
若灯微亮则绝缘有接地击穿。
若灯不亮,但测试棒接地时也出现火花,说明绕组尚未击穿,只是严重受潮。
也可用硬木在外壳的止口边缘轻敲,敲到某一处等一灭一亮时,说明电流时通时断,则该处就是接地点。
(5)电流穿烧法。
用一台调压变压器,接上电源后,接地点很快发热,绝缘物冒烟处即为接地点。
应特别注意小型电机不得超过额定电流的两倍,时间不超过半分钟;
大电机为额定电流的20%-50%或逐步增大电流,到接地点刚冒烟时立即断电。
(6)分组淘汰法。
对于接地点在铁芯心里面且烧灼比较厉害,烧损的铜线与铁芯熔在一起。
采用的方法是把接地的一相绕组分成两半,依此类推,最后找出接地点。
此外,还有高压试验法、磁针探索法、工频振动法等,此处不一一介绍。
4.处理方法
(1)绕组受潮引起接地的应先进行烘干,当冷却到60——70℃左右时,浇上绝缘漆后再烘干。
(2)绕组端部绝缘损坏时,在接地处重新进行绝缘处理,涂漆,再烘干。
(3)绕组接地点在槽内时,应重绕绕组或更换部分绕组元件。
最后应用不同的兆欧表进行测量,满足技术要求即可。
二、绕组短路
由于电动机电流过大、电源电压变动过大、单相运行、机械碰伤、制造不良等造成绝缘损坏所至,分绕组匝间短路、绕组间短路、绕组极间短路和绕组相间短路。
离子的磁场分布不均,三相电流不平衡而使电动机运行时振动和噪声加剧,严重时电动机不能启动,而在短路线圈中产生很大的短路电流,导致线圈迅速发热而烧毁。
电动机长期过载,使绝缘老化失去绝缘作用;
嵌线时造成绝缘损坏;
绕组受潮使绝缘电阻下降造成绝缘击穿;
端部和层间绝缘材料没垫好或整形时损坏;
端部连接线绝缘损坏;
过电压或遭雷击使绝缘击穿;
转子与定子绕组端部相互摩擦造成绝缘损坏;
金属异物落入电动机内部和油污过多。
(1)外部观察法。
观察接线盒、绕组端部有无烧焦,绕组过热后留下深褐色,并有臭味。
(2)探温检查法。
空载运行20分钟(发现异常时应马上停止),用手背摸绕组各部分是否超过正常温度。
(3)通电实验法。
用电流表测量,若某相电流过大,说明该相有短路处。
(4)电桥检查。
测量个绕组直流电阻,一般相差不应超过5%以上,如超过,则电阻小的一相有短路故障。
(5)短路侦察器法。
被测绕组有短路,则钢片就会产生振动。
(6)万用表或兆欧表法。
测任意两相绕组相间的绝缘电阻,若读书极小或为零,说明该二相绕组相间有短路。
(7)电压降法。
把三绕组串联后通入低压安全交流电,测得读书小的一组有短路故障。
(8)电流法。
电机空载运行,先测量三相电流,在调换两相测量并对比,若不随电源调换而改变,较大电流的一相绕组有短路。
4.短路处理方法
(1)短路点在端部。
可用绝缘材料将短路点隔开,也可重包绝缘线,再上漆重烘干。
(2)短路在线槽内。
将其软化后,找出短路点修复,重新放入线槽后,再上漆烘干。
(3)对短路线匝少于1/12的每相绕组,串联匝数时切断全部短路线,将导通部分连接,形成闭合回路,供应急使用。
(4)绕组短路点匝数超过1/12时,要全部拆除重绕。
三、绕组开路
由于焊接不良或使用腐蚀性焊剂,焊接后又未清除干净,就可能造成壶焊或松脱;
受机械应力或碰撞时线圈短路、短路与接地故障也可使导线烧毁,在并烧的几根导线中有一根或几根导线短路时,另几根导线由于电流的增加而温度上升,引起绕组发热而断路。
一般分为一相绕组端部断线、匝间短路、并联支路处断路、多根导线并烧中一根断路、转子断笼。
电动机不能启动,三相电流不平衡,有异常噪声或振动大,温升超过允许值或冒烟。
(1)在检修和维护保养时碰断或制造质量问题。
(2)绕组各元件、极(相)组和绕组与引接线等接线头焊接不良,长期运行过热脱焊。
(3)受机械力和电磁场力使绕组损伤或拉断。
(4)匝间或相间短路及接地造成绕组严重烧焦或熔断等。
(1)观察法。
断点大多数发生在绕组端部,看有无碰折、接头出有无脱焊。
(2)万用表法。
利用电阻档,对“Y”型接法的将一根表棒接在“Y”形的中心点上,另一根依次接在三相绕组的首端,无穷大的一相为断点;
“△”型接法的短开连接后,分别测每组绕组,无穷大的则为断路点。
(3)试灯法。
方法同前,等不亮的一相为断路。
(4)兆欧表法。
阻值趋向无穷大(即不为零值)的一相为断路点。
(5)电流表法。
电机在运行时,用电流表测三相电流,若三相电流不平衡、又无短路现象,则电流较小的一相绕组有部分短断路故障。
(6)电桥法。
当电机某一相电阻比其他两相电阻大时,说明该相绕组有部分断路故障;
(7)电流平衡法。
对于“Y”型接法的,可将三相绕组并联后,通入低电压大电流的交流电,如果三相绕组中的电流相差大于10%时,电流小的一端为断路;
对于“△”型接法的,先将定子绕组的一个接点拆开,再逐相通入低压大电流,其中电流小的一相为断路。
(8)断笼侦察器检查法。
检查时,如果转子断笼,则毫伏表的读数应减小。
4.断路处理方法
(1)断路在端部时,连接好后焊牢,包上绝缘材料,套上绝缘管,绑扎好,再烘干。
(2)绕组由于匝间、相间短路和接地等原因而造成绕组严重烧焦的一般应更换新绕组。
(3)对断路点在槽内的,属少量断点的做应急处理,采用分组淘汰法找出断点,并在绕组断部将其连接好并绝缘合格后使用。
(4)对笼形转子断笼的可采用焊接法、冷接法或换条法修复。
四、绕组接错
绕组接错造成不完整的旋转磁场,致使启动困难、三相电流不平衡、噪声大等症状,严重时若不及时处理会烧坏绕组。
主要有下列几种情况:
某极相中一只或几只线圈嵌反或头尾接错;
极(相)组接反;
某相绕组接反;
多路并联绕组支路接错;
“△”、“Y”接法错误。
电动机不能启动、空载电流过大或不平衡过大,温升太快或有剧烈振动并有很大的噪声、烧断保险丝等现象。
误将“△”型接成“Y”型;
维修保养时三相绕组有一相首尾接反;
减压启动是抽头位置选择不合适或内部接线错误;
新电机在下线时,绕组连接错误;
旧电机出头判断不对。
3.检修方法
(1)滚珠法。
如滚珠沿定子内圆周表面旋转滚动,说明正确,否则绕组有接错现象。
(2)指南针法。
如果绕组没有接错,则在一相绕组中,指南针经过相邻的极(相)组时,所指的极性应相反,在三相绕组中相邻的不同相的极(相)组也相反;
如极性方向不变时,说明有一极(相)组反接;
若指向不定,则相组内有反接的线圈。
(3)万用表电压法。
按接线图,如果两次测量电压表均无指示,或一次有读数、一次没有读数,说明绕组有接反处。
(4)常见的还有干电池法、毫安表剩磁法、电动机转向法等。
(1)一个线圈或线圈组接反,则空载电流有较大的不平衡,应进厂返修。
(2)引出线错误的应正确判断首尾后重新连接。
(3)减压启动接错的应对照接线图或原理图,认真校对重新接线。
(4)新电机下线或重接新绕组后接线错误的,应送厂返修。
(5)定子绕组一相接反时,接反的一相电流特别大,可根据这个特点查找故障并进行维修。
(6)把“Y”型接成“△”型或匝数不够,则空载电流大,应及时更正。
现场总线技术标准化的思考与CIP协议架构的启发
2006-12-12
罗晓宇,钟锐华
中国现场总线网
现场总线技术作为近二十年来自动化领域最热门的话题之一,其标准化的进程既引人注目又令人困惑。
作者在从事这一领域的工程实践过程中,结合对各种现场总线技术通讯协议的研究学习,对现场总线技术的标准化进程进行了一些分析思考,并在CIP协议架构的启发下,提出了一些个人对现场总线技术标准架构设计方面的观点和想法。
一、现场总线技术的兴起和市场动力
七十年代,微处理器技术的进步以及“集中管理、分散控制”的风险控制策略促成了基于微处理器芯片的集散控制系统开始进入市场,同时也将用于控制器之间和控制器与上位机之间的数据通讯的计算机通讯网络技术引入了工业自动化领域。
但此时由于各自动化厂商的控制系统自成一体,网络通讯只是其系统的内部功能之一,无需与外界进行数据交换。
八十年代以后,随着微处理器芯片应用的不断渗透,“智能化”的传感器、开关、执行机构等工业现场控制器件不断涌现,但各厂商根据所生产的元器件的特点而开发的数据通讯协议也是五花八门、种类繁多,单个的元器件似乎充满了“智能”,但与控制系统集成时仍然只能沿用传统的电缆接线一对一接入I/O接口板,并不能真正体现其“智能化”的优点。
因此要将这些众多不同厂商的“智能化”现场控制元器件集成为一个完全数字化的集散控制系统,公共开放的网络通讯协议标准就显得非常必要。
在这一市场动力的推动下,各控制系统(包括PLC和DCS)的生产厂商基于其原先内部专用的网络通讯技术纷纷提出了各种各样开放程度不同的现场总线通讯协议标准,并随着技术的进步不断补充和完善。
二、现场总线技术标准化的现状
从上世纪八十年代开始,美国仪表协会(ISA)和国际电工委员会(IEC)即已设立专门的机构来研究和提出现场总线技术标准。
然而由于种种原因,经过长达十多年的努力,终于在2000年颁布的国际标准IEC61158却是一份让所有自动化领域相关人员感到困惑和尴尬的标准,因为它包含八种互不兼容的总线协议。
随着IT技术不断向工业领域渗透,以太网(Ethernet)作为新的现场总线技术让很多人充满了期望,但2003年第三版的lEC61158标准的颁布,在新版本中增加了三种基于以太网技术的新协议,将总线协议的标准增加到十一种,同时还有更多的基于以太网技术的新协议正积极努力加入到标准的协议集内。
三、现场总线技术标准化进程的分析思考
分析用户的需求,我们大致可以将用户对现场总线的技术要求和期望分为以下三个层次:
1)智能元器件与控制器(站)之间的互连互通,主要目的是替代传统的I/O电缆。
其要求是能传送传统的I/O数据,并附加传送一些智能元件特有的告警和故障诊断信息。
2)在传送以上实时监控数据的基础,用户进一步的要求是希望通过网络来进行集中的工程设计组态、程序动态修改下载以及元器件的远程诊断和校准等。
3)在互连互通的基础上,用户希望能够在各种情况下“重构”系统,如在元器件损坏更换、系统改扩建以及系统升级或部分升级等情况下,要求能够无障碍地接入第三方的元件或新技术条件下的升级产品。
从以上用户的需求上可以看出,用户是希望通过现场总线技术,利用网络数据通讯的手段实现各种智能元器件与控制器(站)之间的“互连”、“互通”、“互换”,但并没有要求说所有这些功的必须在一个“单一”的统一网络来实现。
正如在Internet网络上用户希望实现电子邮件、文件下载、网络浏览、网上游戏等服务,但这并没有要求Internet网络必须是一个“单一”的“同构”网络。
从通讯协议的构筑模型上看,目前几乎所有的通讯协议一般来说都是参照OSI的七层模型,但绝大多数协议都是从物理层开始“自底向上”自成一体地构筑一个“垂直一体化”的协议栈,使得八种标准协议之间在任何层次上都很难“互连”、“互通”,更谈不上“互换”功能。
事实上制定OSI分层模型的目的是让涵盖不同技术元素不同发展变化速度的通讯实体分为相互独立的层次,以使各层次既能够相互结合成为一个端对端完整的协议栈,又能够相互独立发展而不互相制约。
比如在我们最熟悉的Internet网络协议簇中,因特网之所以能够如此成功,就是以TCP/IP协议栈为核心,对上可以服务众多不同的应用层协议(WWW、FTP、电子邮件等),向下则可在众多不同的局域网(Ethernet、FDDI等)、广域网(拨号网络、X.25等)平台上实现。
从某种意义上来说,现场总线技术的标准化进程出现目前困境的原因很大程度上可能是当初一开始就将“单一的垂直一体化的同构网络”这一过于“理想”的期望设定为技术标准的目标,结果不但不能达到目的,反而适得其反,出现了“群雄纷争,互不兼容”的局面。
四、CIP协议架构的启发
CIP协议规范是叠加在ControlNet、DeviceNet和EtherNet这三种完全不同的网络技术平台之上的“与网络硬件技术无关”的公共的“网络传输层、应用层、用户层”协议规范,也就是说它可以实现“异构网络”下的系统的“互连”、“互通”,直至“
 升级会员
升级会员 