PIV瞬时全流场的测量实验Word格式文档下载.docx
《PIV瞬时全流场的测量实验Word格式文档下载.docx》由会员分享,可在线阅读,更多相关《PIV瞬时全流场的测量实验Word格式文档下载.docx(12页珍藏版)》请在冰豆网上搜索。
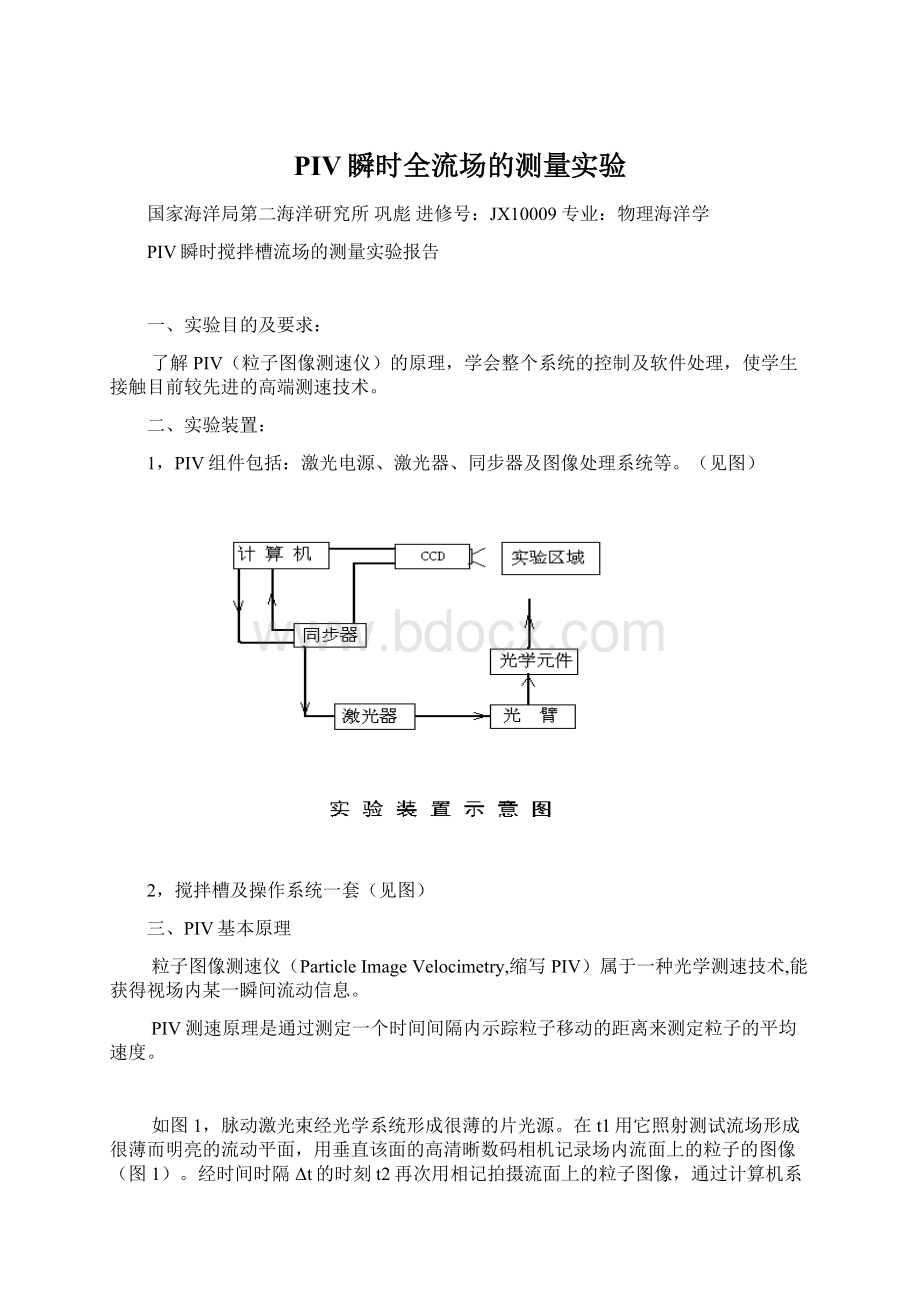
二、实验装置:
1,PIV组件包括:
激光电源、激光器、同步器及图像处理系统等。
(见图)
2,搅拌槽及操作系统一套(见图)
三、PIV基本原理
粒子图像测速仪(ParticleImageVelocimetry,缩写PIV)属于一种光学测速技术,能获得视场内某一瞬间流动信息。
PIV测速原理是通过测定一个时间间隔内示踪粒子移动的距离来测定粒子的平均速度。
如图1,脉动激光束经光学系统形成很薄的片光源。
在t1用它照射测试流场形成很薄而明亮的流动平面,用垂直该面的高清晰数码相机记录场内流面上的粒子的图像(图1)。
经时间时隔Δt的时刻t2再次用相记拍摄流面上的粒子图像,通过计算机系统,识别出同一粒子的两幅照片上的位置,从而测量出该流面上的粒子移动距离,故Δt中的粒子移动平均速度为:
vx=Δx/Δt,vy=Δy/Δt
特别要说明的是,PIV测试是将Δt中的平均速度作为时刻t瞬时速度,所以Δt应该尽量小,而测量位移量又要求像平面上的粒子图像不能重叠,要有足够的位移及分辨,因此Δt不能太小。
一般粒子图像间距离大于两倍的粒子图像直径。
另外,位置量不能超查问区尺寸的1/4,偏离像平面不得超出片光源厚度的1/4,所以Δt必须根据测量对象的流速合理设定。
PIV系统组成
PIV测速包括图像的拍摄,图像分析及从中获得的速度信息,速度场显示等。
1、成像系统
(1)激光源:
两台Yag激光器。
用外同步装置来分别触发激光器以产生脉冲,然后再用光学系统将两路光永冲合并到一处。
脉冲间隔可调范围很大,满足从而实验低速到高速流动的测试.
(2)片光源光学系统:
光学元件包括柱面镜和球面镜,准直了的激光束通过柱面镜后在一个方向内发散,同时球面镜用于控制片光的厚度.
(3)记录装置:
两台高分辨率数字摄像机.
2、分析显示系统:
PIV属于高成像密度图像处理,目前采用的是互相关分析(一种统计方法)。
经过数据处理后,得到需要的各类图像信息及速度场的显示。
3、同步控制器
同步控制系统是整个PIV系统的控制中心,用于图像的捕捉及激光脉冲时序控制,以及实验外部触发等功能。
四、操作步骤
1.仔细检查各连接插头是否有脱落或松动
2.开机:
开启激光电源,预热,约二十分钟后才能触发激光;
开启计算机;
开启相机电源
3.开启软件(DynamicStudio),出现以下窗口
1.点击图标DynamicStudio,打开软件出现以下界面:
2.新建数据:
点击File至NewDatabase,建立新的数据库
2.点击菜单上
,连线正常后显示如下:
如果图中出现异常就检查硬件上的连接。
3.做标定:
将标定板(10CM)放入测量环境,并软件上设置成“SingleFrameMode”,“Numberofimages”调为1(即只拍一幅照片)
a.点击“FreeRun”能看到实时图像,点击Acquire,标定板拍照如下图:
保存数据:
点击上图中的“AcquiredData”,进行保持数据的处理。
先取文件名,后点击右上角区的“SaveinCalibration”。
b.标定过程:
选中“FlowSense4M”,至菜单“MeasureScaleFactor”,出现以下图。
将“Absolutedistance”设置成100,并将红色的A,B移至标定板两侧端点位置,点击“OK”确认。
二维标定完成。
4.测试过程:
a.调整激光头至相应测量位置,在激光控制器面板中,用内触发模式触发激光,以确定实验位置。
注意:
勿必在正式实验前在摄像机将加上滤光镜,以免过强的激光损坏CCD。
开至用外触发模式,进行实验。
软件设置如下:
用的模式是“DoubleFrameMode”,“Timebetweenpulses”(两整激光脉冲之间的时间)设为3000,“Triggerrate”(每秒7.4组激光脉冲)及“Numberofimages”(脉冲组数)。
b.点击“Acquire”出现提示对话框。
点击“StartAcquisitionandFireLaser”,激发激光,软件的显示见下图。
先取文件名,后点击右上角“SaveinDatabase”
下图是保存过程。
保存完后可以点击回放。
现场实测图片:
5.数据处理:
选中所要处理数据,出现下拉菜单,选中“Analyze”
出现以下图,选“PIVSignal”,点“AdaptiveCorrelation”,点“OK”确认,进行初步处理。
如需深入处理可按此方法进行。
五、数据处理成果图:
 升级会员
升级会员 