作业3电压闭环仿真Word文档下载推荐.docx
《作业3电压闭环仿真Word文档下载推荐.docx》由会员分享,可在线阅读,更多相关《作业3电压闭环仿真Word文档下载推荐.docx(14页珍藏版)》请在冰豆网上搜索。
实际选取管子考虑一定余量。
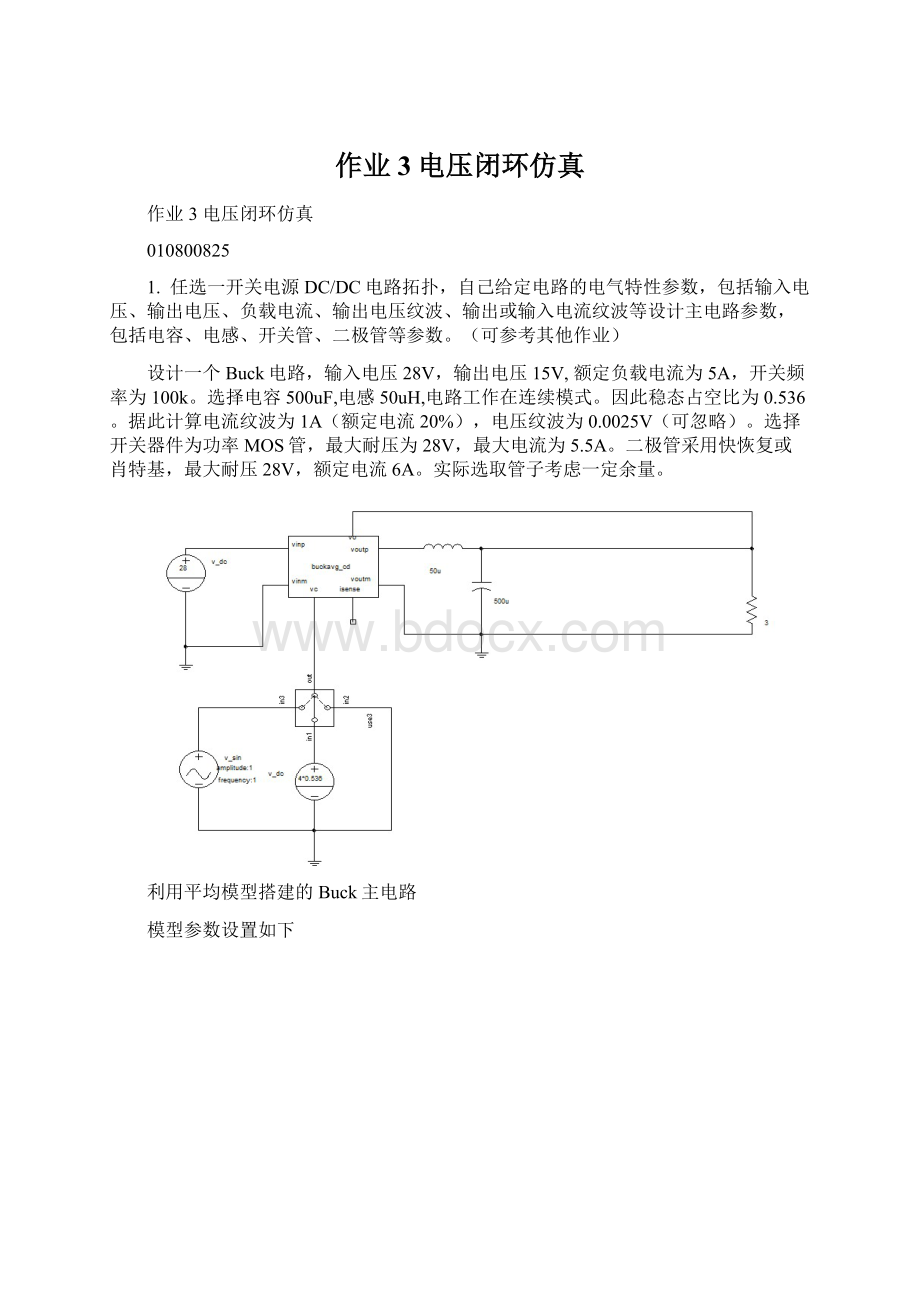
利用平均模型搭建的Buck主电路
模型参数设置如下
2.根据设计的主电路参数,采样状态空间平均模型对开环电路的波特图进行仿真,判断其稳定性。
用saber软件中的Buck平均模型做开环仿真,瞬态分析后输出电压结果如图一。
在之前的瞬态分析基础上作交流小信号分析得开环传递函数的波特图如图二。
图一
图二
从波特图上可知该系统截止频率为2851.8Hz,相位裕度为2.5°
。
可见该系统快速性和稳定性都不够。
必须对截止频率和相位裕度进行补偿来提高快速性和稳定性。
3.根据开环的波特图结果,设计合理的补偿控制电路,给出设计的结果,并对补偿后的波特图进行判断,判断其稳定性。
采用电压闭环控制:
假设现有高精度的5V电压作为电压比较基准。
为使得电路输出15V,对负载电压进行3:
1电压采样,并与基准比较,形成误差信号并通过补偿器和PWM调制电路形成占空比。
选取补偿后的系统开环传递函数截止频率为5kHz,相位裕度为52°
图三为系统补偿前的开环传递函数相频特性,由此可知系统相位裕度仅1°
左右,故需要在5kHz处通过前后放置零极点来提升51°
的相位。
根据K因子补偿结论,有公式1。
(公式1)
该公式描述了为了使得fc频率处相位提升θ角度所应该放置零极点的位置。
fp和fz分别为极点和零点频率。
故将fc=5000,θ=51°
代入,求得fp=14.5kHz,fz=1.7kHz。
为了使得5kHz的增益为0dB,故需要对系统直流增益提升使得幅频曲线平行上升,使得曲线在5kHz处穿过0dB线。
补偿后的直流增益可由公式2算得。
(公式2)
Go为直流增益,fc为截止频率5kHz,fz为补偿的零点频率1.7kHz,fo为Buck电路的二阶谐振频率,从图二可判断为1kHz。
参数代入,可知Go=18.6dB。
由图四可知补偿之前的直流增益为16.9dB,故需要补偿1.7dB,对应的放大倍数为1.2。
考虑1/3的采样增益,故真正需要的放大倍数为3.6。
图三
图四
选择补偿网络如图五。
图五
根据运放的传递函数可知R1和C1构成了一个极点,R2,C2构成了一个零点。
R1/R2值为补偿器补偿的直流增益。
根据上述计算,取R2=10k,C2=9.36nF,R1=36k,C1=300p(实际选取应当根据电阻电容的标称值来选取)。
将补偿网络插入原来的开环系统,分析补偿后的开环频率响应如图六。
图六
由图六可以知道补偿后的开环传递函数和截止频率与设计的基本吻合。
为了进一步提高低频段的性能,消除静态误差,可以在零极点补偿的基础上增加PI补偿。
补偿网络如图七。
图七
R1和R3构成一个PI零点。
由于PI零点作用于低频,故C3较大,在频率较高时相当于短路,不影响R1和C1构成的极点。
前提是C3足够的大,即PI零点频率足够的低才能不影响高频补偿。
但为了获取较大低频段的增益,PI零点频率也不能太低,选择该频率为变换器二阶谐振频率一半即500Hz,得到C3=8.85nF,将改造后的补偿电路插入系统中,仿真得到系统开环频率响应如图八。
图八
由图八所示,该补偿基本能满足设计指标。
4.对补偿后的电路进行闭环瞬态仿真,观察输出电压大小、输出电压纹波、电感电流纹波是否满足设计要求。
将整个闭环电路原理图绘制如图九,仿真输出电压大小、纹波、电感电流纹波分别如图十、十一、十二。
图九
图十
图十一
图十二
由上述图十至图十二可知,该电路基本满足设计指标。
5.仿真闭环电路对电源输入电压扰动的影响,负载电流扰动的影响,并评价其抗扰能力。
分别对补偿前后电路在8ms处进行扰动,观察其动态响应。
结果如图十四和图十五所示。
图十四补偿前动态响应
图十五补偿后动态响应
对比补偿前后的动态和稳态响应可知,该补偿能够良好的抑制扰动,提高了系统动态响应。
同时,补偿后电路输出非常接近15V,静态误差几乎为0,因此,该补偿也提高了系统的稳态精度。
作业4商业芯片级闭环仿真
(续作业三)
作业三对一个Buck电路进行了补偿,仿真结果表明该补偿有效提高了闭环系统的动态和稳态性能。
作业四在其基础上用一款商用的集成芯片来搭建控制回路,并比较了用分立元件和集成芯片搭建的控制回路的响应。
采用SG1524芯片进行仿真。
该芯片具有一个高增益的电压放大器,一个误差1%的5V偏置电路,一个振荡电路,具有过流保护功能。
芯片内部结构框图如图十六。
图十六
根据该芯片的功能,将作业三搭建的分立元件模型用该集成芯片及其外围电路代替。
画出其原理图如图十七。
图十七
电压采样通过10k和5k电阻分压。
电压放大器正向输入端接芯片ref脚。
该脚是芯片内部5V偏置电路的输出引脚。
Ref脚需要通过一个0.02uF电容接地来滤除高频干扰。
反向输入端接反馈电压信号。
在comp和反向输入端接补偿网络,同时要外接限幅电路来限制电压放大器输出电压。
电流放大器正负端子分别接电流采样电阻与地,作过流检测保护。
Rt和ct引脚分别接电阻电容,该RC时间常数决定了芯片内部的振荡周期。
驱动信号输出是通过两个集电极开路的三极管输出的,故需要通过上拉电阻接至高电平。
驱动输出的最大电压需要双向限幅,以免损坏开关管。
输出的信号通过一个比较器把模拟信号变成了数字信号的PWM波,来驱动一个理想的开关管。
如果实际采用电压型驱动的开关器件,对于buck电路而言,需要隔离驱动。
对该电路进行仿真,输出电压结果如图十八,电压纹波如图十九,电感电流纹波如图二十。
图十八
图十九
图二十
分别将图十八至二十,与作业三图十至十二对比,可知两者仿真出来的波形基本一致。
现在在8ms时添加与作业三中一样的一个扰动信号,观察输出电压响应如图二十一所示。
图二十一
将图二十一对比图十五可知,用集成芯片仿真后,相比用理想的运放电路搭建的控制环路,动态响应略差。
可能是两种模型本身的差别导致的。
 升级会员
升级会员 