HYPACK说明书附录一和附录二.docx
《HYPACK说明书附录一和附录二.docx》由会员分享,可在线阅读,更多相关《HYPACK说明书附录一和附录二.docx(20页珍藏版)》请在冰豆网上搜索。
HYPACK说明书附录一和附录二
附录一
A数据调整程序
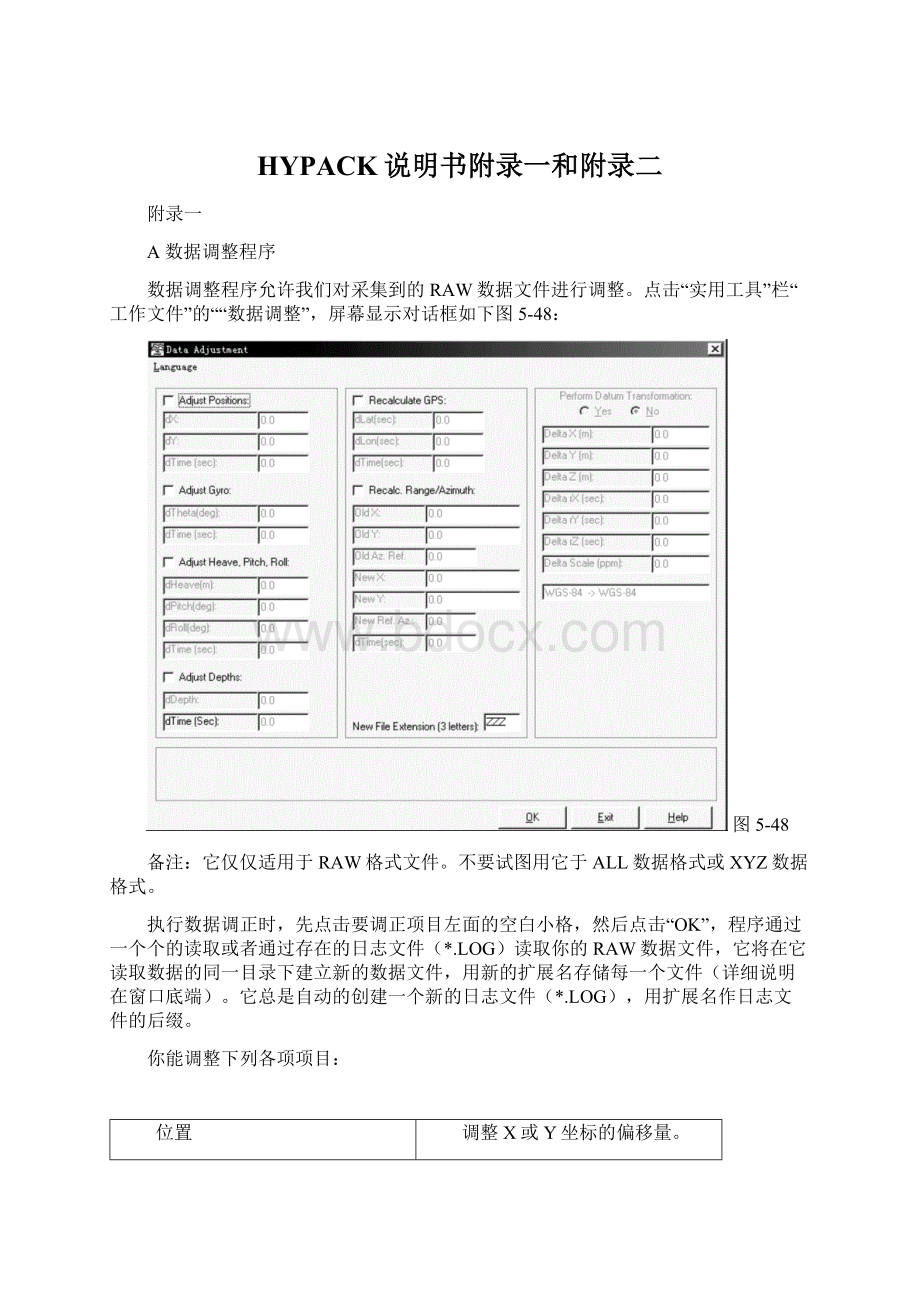
数据调整程序允许我们对采集到的RAW数据文件进行调整。
点击“实用工具”栏“工作文件”的““数据调整”,屏幕显示对话框如下图5-48:
图5-48
备注:
它仅仅适用于RAW格式文件。
不要试图用它于ALL数据格式或XYZ数据格式。
执行数据调正时,先点击要调正项目左面的空白小格,然后点击“OK”,程序通过一个个的读取或者通过存在的日志文件(*.LOG)读取你的RAW数据文件,它将在它读取数据的同一目录下建立新的数据文件,用新的扩展名存储每一个文件(详细说明在窗口底端)。
它总是自动的创建一个新的日志文件(*.LOG),用扩展名作日志文件的后缀。
你能调整下列各项项目:
位置
调整X或Y坐标的偏移量。
调整位置数据的时间标志。
GYRO
调整罗经角度(度)。
调整航向数据的时间标志。
HEAVE—PITCH—ROLL
调整波浪补偿仪前后、左右倾斜程度。
调整水深数据的时间标志。
水深
调整水深。
调整水深数据的时间标志。
重新计算GPS位置
基于原始WGS-84位置重新计算。
输入经度和纬度的补偿(秒)。
调整时间标志。
仅用于横向的墨卡托和UTM格网。
在你重新计算前,进入大地参数程序进行设定。
程序将用到这些,你能在数据调整窗口里设定三参数或七参数转换信息。
重新计算距离—方位(不用)
重新计算你的RANGE—AZIMUTH数据。
它要求老的X-Y台站和参考方位以及新的X-Y台站和参考方位。
调整位置数据的时间标志。
B手工输入
手工输入允许你自己建立沿一条计划测线方向的水深文件。
它建立一个ALL格式文件。
默认的扩展名是*.EDT,但是你也可以自定义扩展名。
1、STARTTHEPROGRAM。
点击HYPACKMAX菜单UTILITIES(工具)下拉菜单FILEWORK的“MANUALENTRY(手工输入)”,屏幕显示对话框如下图5-49:
图5-49
2、输入测线信息(ENTERLINEINFORMATION):
选择一个预先做好的计划测线文件或者人工输入计划测线的起点和终点坐标。
●“FROMFILE”读取来自文件的坐标资料。
(A)SELECTYOURLINEFILE。
单击“BROWSE”选择你想输入数据的线文件。
线文件中包含的线的信息将自动被调入并且能被显示。
(B)在“LINENAME”栏目中,选择你要做的计划测线文件。
(C)存储文件。
单击“FILE”下拉菜单-“SAVE”并且对你的存储文件进行命名。
它的后缀名为*.DEP。
●“MANUALLY”禁止线文件的调入。
你必须输入计划测线的起点和终点坐标。
否则它将类似于“FROMFILE”方法。
3、ENTERPOINTINFORMATION:
●“GAUGE”是潮位改正。
它将被调入原始水深数据文件中。
●“DISTANCEALONGLINEANDDEPTH(沿线距离和深度)”:
输入每一个你想要输入的点的沿线距离及水深。
4、SAVEYOURFILE选择“FILE”下拉菜单“SAVE”并命名你的文件。
你建立的线文件和你的手工输入文件将存储在同一目录下。
附录二
DGPS相关知识简介
第一节GPS基本理论
利用人造地球卫星给海上舰船、空中飞机、地面各种用户和目标、飞行中的导弹及卫星飞船进行导航定位,这在卫星应用中占有极其重要的地位。
由美国的第一代子午仪卫星导航系统到目前的导航全球定位系统(NAVSTARGPS),卫星导航技术获得了飞速发展。
子午仪系统是低高度卫星导航系统,它采用上千公里极轨道和双频多普勒测速导航体制,这个由4—5颗卫星组成的导航系统,可在全球范围内给各种用户进行全天候的高精度的断续的两维定位,精度一般优于40米。
该系统在九十年代前在航海导航方面得到广泛的应用。
但是,由于该系统只能提供两维定位信息(即经度和纬度),而不能定出高度,同时也不能连续进行导航,因而已不能满足用户越来越高的要求。
为了满足用户对导航越来越高的要求,继子午仪之后,美国和前苏联分别研制了导航卫星全球定位系统(NAVSTARGPS)和GLONASS全球导航卫星定位系统,而美国的GPS现已获得广泛应用。
本节仅介绍GPS系统及其应用。
一GPS系统主要特点:
1、全球连续覆盖
该系统能为全球任何地点或近地空间的用户提供连续的全球导航能力。
2、高精度三维定位
该系统能连续地为各类用户提供三维位置、三维速度和精确时间信息。
3、实时导航
该系统能给各类用户随时提供定位信息,即动态实时导航。
这对高动态用户(如飞机)具有很大意义。
4、被动式全天候导航
用户只需要装备GPS接收机设备就可以接收该系统信号进行定位和导航。
5、定位精度高,应用范围广
该系统单点定位在没有美国政府可用选择性SA的前提下优于15米,伪距差分工作方式下为1-5米,载波相位差分方式下为厘米级,而静态定位经数据处理精度为毫米级。
因此除被广泛应用于移动体(车、船、飞机、飞行器等)导航外,还广泛用于大地测量、摄影绘图、地面沉降观测、地震预报、交通管制、海洋测量、勘探定位、海洋捕鱼、建立浮标、管道铺设、浅滩测量、海港领航等。
6、抗干扰能力强
该系统采用了伪随机噪声码技术,因此具有抗干扰能力强、保密性好的优点。
二系统组成、导航方法和定位原理
1、系统组成
全球定位系统由空间卫星部分、地面控制站和用户设备三大部分组成。
空间卫星部分由24颗卫星组成的导航星座组成,24颗卫星配置在6个轨道面上,轨道高度为10183公里,轨道倾角55度,周期为12小时。
这样的星座可使全球任何地点能同时看到6一11颗卫星,保证了系统的全球覆盖和三维定位能力。
地面控制站部分由一个主控站、四个监控站和一个注入站构成,设在美国本土,地面控制站负责对卫星进行跟踪测轨,并对卫星轨道进行计算预报,然后将预报参数和时钟修正参数注入给卫星,以保证卫星能连续向用户发射导航信息。
用户设备由天线、GPS接收机、计算机和控制显示设备等构成。
系统组成见图1.1.1。
2、导航方法和定位原理
全球定位系统采用被动式双频伪随机测距导航体制,其基本原理就是根据时间测距进行导航定位。
如图1.1.2所示。
每颗卫星都装有高稳定度的原子钟,为卫星导航信号提供精确时间。
卫星连续发射伪随机噪声导航信号,导航信号中包括卫星星历表、时钟校正参数、传播延迟参数及其他信息,因此用户接收机通过接收导航信号即可求出卫星发射导航信号时卫星的精确位置。
如果用户接收机也装有同卫星时钟同步的精确时钟,则可确定接收卫星信号时的精确时间,从而测出导航信号从卫星到用户的传播时间,再乘上电波传播速度,就可以计算出卫星到用户之间的距离。
如果用户同时接收三颗卫星的导航信号,就能同时测出用户到三颗卫星的距高,这样分别以每颗卫星为圆心,以卫星到用户距离为半径作球面,就可以获得三个球面,三个球面其交点就是用户所在的位置。
然而,用户接收机是不可能装有精确时钟的,但用户接收机可以通过接收第四颗卫星发射的导航信号而求解卫星时钟,这样不仅能精确确定用户位置,同时还能给出用户不精确时钟的偏差。
由于卫星时钟偏差、用户时钟偏差、卫星抖动以及信号传播延迟引起的测距误差的存在,上述测得的距离不是真正用户到卫星的距高,而称之为伪距。
在数学上,由图1.1.2,伪距由下式确定:
Ri=Ri+c﹡T1+c*(Tu-Ts)
式中:
Ri为用户到卫星的真距离
C为光速
T1为传播延迟及其他误差
Tu为用户时钟误差
Ts为第i颗卫星的时钟误差
这样用户接收四颗卫星导航信号,求出四颗卫星位置,再测出用户到四颗卫星的距离,通过四个距离方程式即可求出用户位置和用户时钟偏差。
测距方法有伪距法和载波相位法等,目前大多数用于实时导航的用户GPS接收机都是采用伪距法,而用于大地测量等的用户GPS接收机采用载波相位法。
双频GPS接收机通过双频测量还可以校正电离层传播延迟。
通过测量多普勒频移可测出用户移动速度。
3、GPS信号结构及导航电文
卫星发射的导航信号包括两个射频频率LI(1575.4MHz)和L2(1227.6MHz),LI信号用P码和C/A码按照90度相移来调制,L2信号仅用P码调制。
L1和L2信号同时还以每秒50比特速率的导航数据比特流连续进行调制。
P码是一种周期为38周的长精确码,以每秒10.23兆比特速率工作。
P码难以捕获,主要用于美国军方及一些被授权使用的用户,而C/A码是一种周期为1毫秒的短粗码,工作速率为每秒1.023兆比特,易于捕获,主要用于一般民用。
GPS导航电文包括GPS用户接收机为成功导航操作和计算所需要的所有数据,这些数据是:
卫星状态信息,从C/A码转换到P码的时间同步信息,计算时钟校正误差的参数及卫星星历表和校正信号通过大气层的传播延迟,此外,还有可近似地确定其他卫星星历表和状态的日程表信息,供信号捕获时使用。
三GPS系统误差源及定位精度
GPS系统误差源主要由下列几种误差源产生的;
1、卫星时钟误差;
2、延迟误差,这是由电离层折射引起的误差;
3、由卫星设备处理和传播信号引起的群延迟误差;
4、星历表误差;
5、多路径误差;
6、用户接收机时钟及接收设备处理信号所引起的误差;
7、人为引入的误差,这是由美国政府人为引入SA引起的误差,SA称为用户选择可用性,对于授权用户,不受SA影响;
8、已选用卫星几何图形。
GPS系统定位精度是由测距误差及所选用卫星的几间图形决定的。
卫星几何图形的影响用误差几何放大系数GDOP表示。
几种定义如下:
①三维位置误差放大系数PDOP
②二维水平位置误差放大系数HDOP
③垂直高度误差系数VDOP
④时间误差放大系数TDOP
⑤误差几何放大系数GDOP=(PDOP)+)(TDOP)
⑥用户位置的三维径向误差(lσ)=PDOP×用户到卫星的距离误差。
⑦用户水平位置的二维径向误差(lσ)=HDOP*用户到卫星的距离误差(1σ)。
⑧用户位置的高度误差(lσ)=VDOP×用户到卫星的距离误差(lσ)。
⑨等于用户时钟偏差(1σ)=TDOP×用户到卫星的距离误差(lσ)。
第二节GPS分类、精度及应用领域
GPS的分类,按电信号结构分可分为P码接收机和C/A码接收机。
按频率分可分为单频和双频接收机。
按用户性质和定位精度分可分为单点定位型、实时差分型和大地测量型,现就这三种类型的精度及应用领域简要介绍如下:
1、单点定位型GPS
单点定位型GPS接收机,定位精度100米左右,适用船舶航海导航和飞机等飞行体导航,是真正的通用全球导航系统,即全球覆盖、全天候、高精度、连续随时定位、使用简便、抗干扰能力强、性能可靠且价格便宜。
2、实时差分GPS
实时差分GPS有伪距差分型和载波相位差分型两种,前者定位精度为米级,后者为厘米级。
伪距实时差分型DGPS主要应用于海上交通管理制、海洋或海图测量、石油勘探定位、航(浮)标铺设、管道铺设定位、海港领航、水上疏浚工程导航等。
载波相位差分型GPS主要应用于要求高精度实时动态定位导航作业,如在海上挖基糟的作业导航。
大地测量型GPS
大地测量型GPS,是通过两个以上GPS接收机同时进行组网静态观测,再通过计算机软件进行数据后处理而获得毫米级定位精度。
它主要应用于大地控制测量、地震预报监测、地面沉降观测等。
第三节DGPS基本理论
对于单频C/A码伪距定位GPS,由于系统时钟误差、卫星位置误差、多路径误差、传播延迟误差等的存在,同时美国政府为保护其自身利益(保护军事和它的授权用户的利益),实行了“选择可用性SA”政策,即人为
 升级会员
升级会员 