使用Photoscan生成DEM及正射影像流程文档格式.docx
《使用Photoscan生成DEM及正射影像流程文档格式.docx》由会员分享,可在线阅读,更多相关《使用Photoscan生成DEM及正射影像流程文档格式.docx(9页珍藏版)》请在冰豆网上搜索。
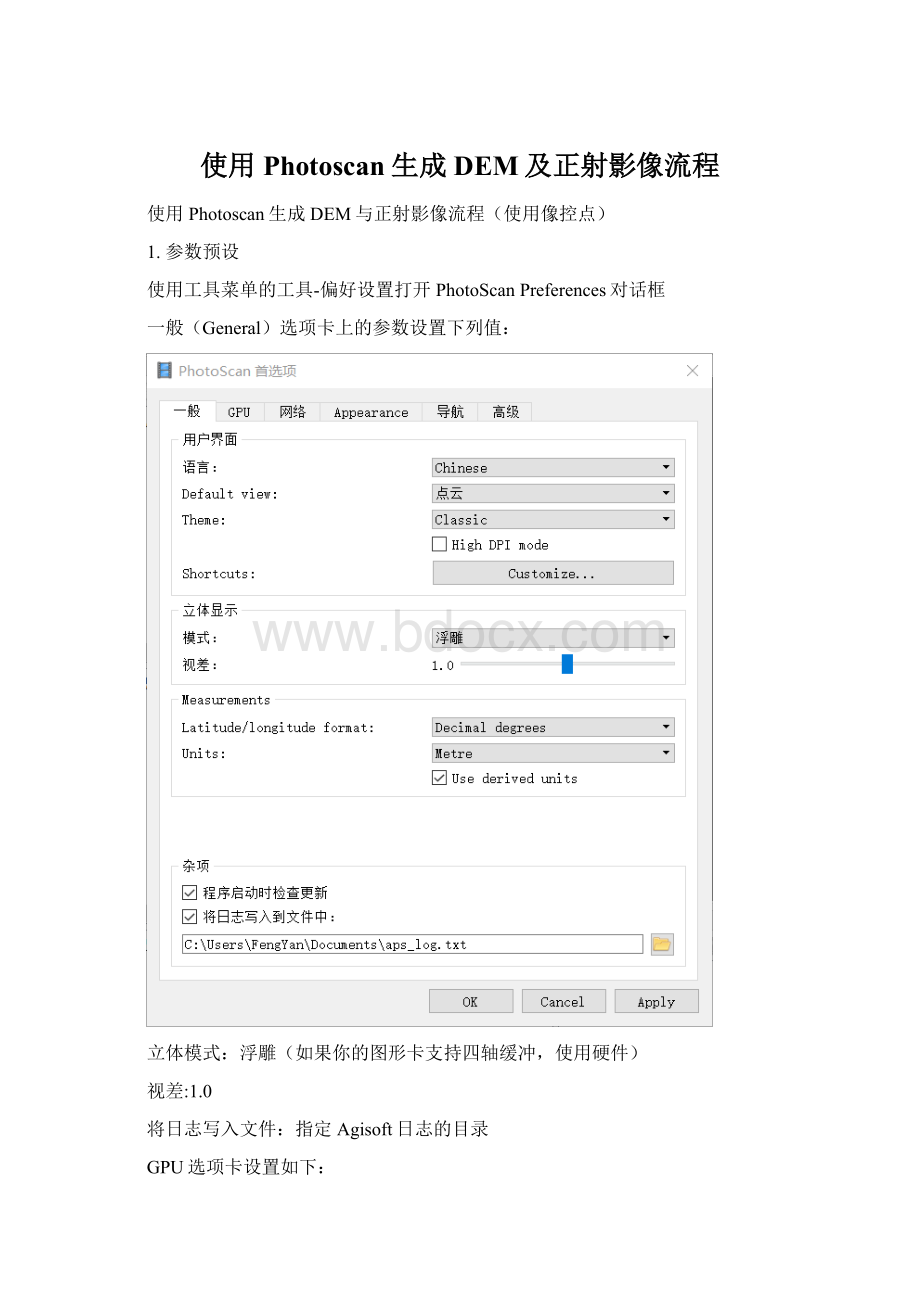
保持深度图:
启用
存储绝对图像路径:
禁用
启用VBO支持:
2.添加照片
从工作流菜单中“添加照片”选择添加照片命令或单击工作区工具栏上的AddPhotos按钮。
在添加照片对话框中浏览源文件夹并选择要处理的文件。
点击打开按钮。
3.装载相机POS文件
生成的模型使用的坐标系统是由这个步骤中设置的相机POS坐标系统决定的。
如果相机位置未知,这一步可以跳过。
对齐照片这种情况下需要更多的时间。
打开视图菜单中的参考面板,在参考面板工具栏上单击“导入”按钮,并在打开的对话框中选择包含POS信息的文件。
最简单的方法是载入字符分隔的文本文件(每张照片的x-和y坐标和高度(相机方位数据,即俯仰、滚动和偏航值,也可以导入,但数据不是必须)。
然后单击参考窗格中的Settings按钮,在参考设置对话框中选择相应的坐标系统,并根据测量准确度设置照片POS精度及标记、连接点、精度,如果没有在导入POS时指定坐标系,也可以在这个面板中指定坐标系。
地面高程:
在倾斜拍摄的情况下,应该指定对应坐标系统椭球面上的平均地面高度。
点击确认后,相机位置会标记在模型视图中,如果在POS数据正确的情况下无法看到相机位置,点击工具栏中的显示相机按扭,然后点击工具栏上的重置视图按钮。
4.检查相机校准
打开菜单栏“工具”-“相机校准”窗口。
默认情况下,Photoscan将在对齐照片和优化的过程中通过照片的相应参数自动估算矫正参数,如果相机相关参数缺失可以手工输入。
5.对齐照片
在菜单中“工作流”下选择对齐照片。
在这个流程,PhotoScan将在重叠图像之间找到匹配点,估计每个照片的相机位置,并构建稀疏点云模型。
在对齐照片对话框中为参数设置以下推荐值:
精度:
高(低精度设置可以在较短的时间内获得粗糙的相机位置)
配对预选:
参考+通用(在相机位置未知的情况下应使用通用预选模式)
应用掩码限制功能:
禁用(在任何区域被屏蔽的情况下启用)
关键点:
40000
联系点限制:
4000
自适应相机模型拟合:
启用(允许失真参数估计)。
单击OK按钮开始照片对齐。
将得到稀疏点云模型,在模型视图中相机的位置和朝向是由视图窗口中的蓝色矩形表示的。
6.位置标记
标记用于优化相机位置和方向数据。
为了确保地理位置的精度,至少应该有10-15个地面控制点(GCPs)在感兴趣的区域内均匀分布。
为了能够有效的放置标记(这将会更快更容易),您需要首先从工作流菜单中选择Build网格命令,并在Build中指定以下参数重构几何图形:
点击OK。
当几何图形被构建后(通常需要几秒钟的时间来重建基于稀疏点云的网格),在照片视图中,通过双击照片,可以在照片视图中看到GCP。
7.优化照片对齐
为了提高相机内外参数的计算精度,并纠正可能的失真(如“碗效应”等),应运行优化程序。
如果地面控制点坐标几乎精确在几厘米精度(基于标记的优化过程)中,这一步是特别推荐的。
单击参考窗格中的设置按钮,在参考设置对话框中的列表中为GCP数据选择相应的坐标系统,并按下列值设置测量精度
Markeraccuracy:
0.005(根据实际测绘精度给定).
Scalebaraccuracy:
0.001
Projectionaccuracy:
0.1
Tiepointaccuracy:
1
在优化之前,也可以用相应的标准在Model菜单的GradualSelection对话框中删除带有最高重投影错误值的点。
在参考面板上,取消选中所有照片,并检查在优化过程中使用的标记。
其余未被使用的标记可以作为验证点来评估优化结果。
由于相机坐标的测量精度通常比GCPs低得多,因此推荐使用这种方法,也可以排除由于机载GPS设备故障导致的相机位置的任何可能的异常值。
单击参考面板工具栏上的优化按钮,在打开的对话框中选择您想要优化的相机参数。
单击OK按钮启动优化过程。
8.设置边界框
边界框用于定义重建区域。
工具栏中“调整区域大小”和“旋转区域”工具可以调整边界框大小和角度。
重要提示:
边界框的彩色部分表示将被视为地面平面,必须在模型下设置并与XY平面平行。
如果网格是在高度场模式下构建的,这一点很重要,这对于空中数据处理工作流是合理的。
9.建立密集点云
根据预估的相机位置,计算每个相机的深度信息,并将其组合成一个密集的点云。
从工作流菜单中选择构建密集的云命令,推荐按下列参数设定设置:
质量:
中等(高质量需要相当长的时间,需要更多的计算资源,低质量可用于快速处理)
深度过滤:
进取(如果要重建的场景的几何图形是复杂的,有许多小细节或无纹理的表面,比如屋顶,建议设置为中)
10.构建网格(可选:
如果多边形模型不需要作为最终结果,可以跳过)
在稠密点云被重建后,可以根据密集的云数据生成多边形网格模型。
从工作流菜单中选择Build网格命令。
在BuildMesh对话框中为参数设置以下推荐值:
表面类型:
高度场
源数据:
密集云
多边形数:
中(在结果模型中最大的面数。
在高/中/低预设标签旁边显示的值是基于稠密云中的点数。
定制值可以用于更详细的表面重构)。
插值:
单击OK按钮启动网格重构。
11.编辑几何
有时,在构建纹理图和导出模型之前,有必要编辑几何图形。
不需要的面可以从模型中移除。
首先,您需要使用工具栏中的选择工具来选择要删除的面。
在模型中,选定的区域以红色突出显示。
然后使用删除工具(或Delkey)或修建工具按钮,删除所有选中的面。
如果原始图像的重叠不够,可能需要在几何编辑阶段使用工具菜单中关闭漏洞命令来产生无漏洞模型。
在关闭漏洞对话框中选择漏洞大小
12.构建纹理(可选的;
仅适用于多边形模型)
这一步在正射影像导出工作流程中并不是必需的,但是在导出之前可能需要检查纹理模型,它可能对提高标记位置的精度有帮助。
为构建纹理对话框中的参数设置以下推荐值:
映射模式:
正色摄影
混合模式:
马赛克
纹理大小/计数:
8192(像素的纹理图的宽度和高度)
启用颜色校正:
禁用(该特性对于处理具有极端亮度变化的数据集非常有用,但对于一般情况来说,不禁用它会节省大量时间)
13.BuildDEM
数字高程模型基于密集的云或网格模型生成。
通常先择默认项是首选,因为它提供了更准确的结果(Low-Poly模式可能导致不准确的DEM),并允许更快的处理,因为它可以跳过网格生成步骤。
在DEM生成过程完成之后,可以通过双击工作区窗格上块内容中的DEM标签来打开重构的模型:
14.BuildOrthomosaic
从工作流菜单中选择BuildOrthomosaic命令:
为orthomosaic生成过程选择所需的表面:
网格或DEM,以及混合模式。
根据原始图像的平均地面采样分辨率,可以指定像素大小。
软件根据表面大小和输入像素大小,计算orthomosaic(像素)的总大小,并在对话框的底部显示。
所生成的orthomosaic可以用类似于数字高程模型的正射模式进行评估。
它可以通过双击工作区窗格中的orthomosaic标签来打开视图模式。
15.导出Orthomosaic
从文件菜单中选择ExportOrthomosaic导出jpeg/Tiff/png命令。
在能否出Orthomosaic对话框中为参数设置以下推荐值:
投影:
期望坐标系
像素大小:
期望的导出分辨率(请注意,对于WGS84坐标系统应指定分辨率为米)。
分割成块:
10000x10000(如果出口区域很大,建议启用)
区域:
设定模型部分的边界
TIFF压缩和JPEG质量应该根据工作要求来指定。
BigTIFF格式允许克服大型orthomosaics的文件大小限制,但是它不受某些应用程序的支持。
16.导出DEM
从文件菜单中选择导出DEM/bil/xyz命令
为导出DEM对话框中的参数设置以下推荐值:
无数据值:
不可见点的值;
应根据后处理应用程序的要求进行指定。
所需的导出分辨率
10000x10000(如果导出区域很大,建议启用)
设置模型的边界
 升级会员
升级会员 