机械设计制造及其自动化毕业设计外文翻译概况Word下载.docx
《机械设计制造及其自动化毕业设计外文翻译概况Word下载.docx》由会员分享,可在线阅读,更多相关《机械设计制造及其自动化毕业设计外文翻译概况Word下载.docx(16页珍藏版)》请在冰豆网上搜索。
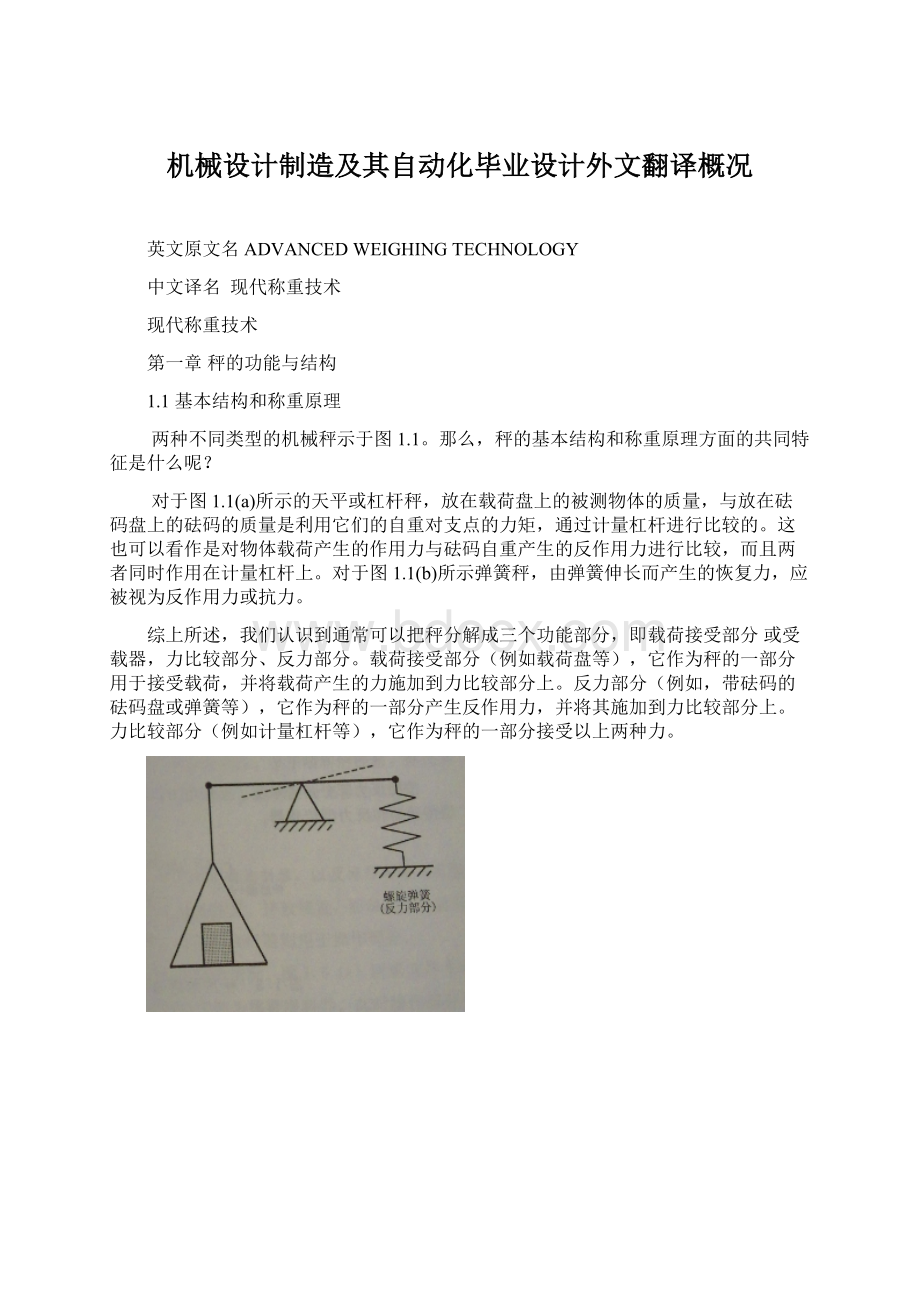
力比较部分(例如计量杠杆等),它作为秤的一部分接受以上两种力。
(a)天平或者杠杆秤(b)弹簧秤
图1.1机械秤的两种类型
当我们检查任何一种机械秤时,会注意到它们通常都具有以上结构。
所以,我们可以认为这种结构式秤的基本结构。
此外,测量是以物体质量产生的作用力与反力部分产生的反作用力之间的平衡为基础的。
所以,我们可以认为秤的称重原理是利用了力的平衡。
现代科技的发展,使我们在质量测量方面不仅能够利用力的静平衡,而且还可以利用力的动平衡。
载荷传递杠杆应该包括在载荷接受部分之中。
对于料斗秤中称重传感器直接支撑料斗的情形,可以认为它属于力比较部分被省略的一种特例。
对于天平或杠杆秤,其测得值可以从反力部分上的砝码变化中获得。
对于弹簧秤,其测得值可以从反力部分的弹簧伸长变化中获得。
一般来说,机械秤的测得值可以从反力部分产生的某些量值变化中获得。
1.2电秤和电子称系统的构成
机械秤是指包括显示功能在内的所有功能都能通过机械手段实现的一种秤,而电秤和电子称具有一个能将反力部分产生的变化转换成电量的传感器,还具有一个能处理电量信号以获得测量值的信号处理装置。
所以,电秤和电子称的特征在于有传感器和信号处理装置。
图1.2说明了电秤和电子称的基本系统构成。
传感器将转化了的电信号,输送给由3种基本电路组成的信号处理装置,它们是输入电路、数据处理电路、输出电路。
输入电路上有例如滤波器、放大器、A/D转换电路等,它们将传感器的输出信号变换成更适用于数据处理的信号。
数据处理电路通过处理其输入信号,来获取测得值以及与测量有关的必须值。
输出电路则是传输处理好的测量结果的电路。
图1.2电秤和电子称基本系统框图
按照反力部分是否承受了反作用力,可以将传感器如图1.3所示划分为两类,即非反力型传感器和反力型传感器。
图1.3秤用传感器按是否承受反力所作的分类
1.3工业秤的功能及其系统构成
1.3.1功能特征和分类
工业秤主要用于工业称重,它们具有以下特征:
(1)对载荷接受部分的加载或卸载时自动进行的。
(2)用物体自重W确定物体质量值M的过程是自动进行的。
这种秤的系统框图示于图1.4。
此外大多数工业秤还有以下一个特征,即
(3)具有质量值的控制功能。
典型工业秤的名称和功能列于表1.1。
表1.1工业秤的名称及其功能
图1.4工业自动秤的系统框图
1.3.2控制的目的
若注意观察一下加到载荷接受部分上的物体的质量流动状态,及其与经过测量后的物体的质量流动状态之间的差异,我们可以得知表1.1中所说的质量值控制的目的就是为了控制质量流动的状态。
从这个观点出发,料斗秤或包装秤的控制目的,就是为了获得一种断续流动状态,而每次断续流动的量都是预定的。
联合(分选组合)秤的控制目的也属于这种类型。
检重秤的目的,是为了按照预定质量等级获得离散的流量动状态。
至于喂料的控制,则是为了获得一个预定质量的流动状态,或者获得一个总量与预定值相同的流量东状态。
1.3.3系统的结构
一个控制系统通常包括被控对象、检测部分、调节部分或控制器,以及操作部分。
在工业称重系统中,被控对象包括供料装置、分配装置、排放装置、而被控变量就是被测质量。
图1.4所示的系统相当于一个检测部分,而各种执行器则用于操作部分。
图1.5显示了从系统构成观点对工业称重系统的分类情况。
图1.5(a)所示为料斗秤或包装秤的系统构成图。
被控对象是供料装置,其典型实例为螺旋喂料器。
此时操作部分是驱动喂料器的一个变速电机。
称量斗相当于载荷接受部分。
目标值用符号R表示,操作变量用符号C表示。
符号m和m'分别代表质量流动的状态;
用不同的符号意指两种状态有所不同。
图1.5(b)所示为一台喂料秤的系统构成图,它的典型实例是一台变速的皮带喂料秤,载荷接受部分皮带称重段和称重托轮组成。
被控对象时皮带喂料器或供料装置,而操作部分是变速点击,被检测质量的总量用符号Q表示。
选择Q或其对时间的导数Q'为被控变量,为了得到Q值,就需要测量皮带的运行速度v。
图1.5(c)所示为一台检重秤的系统构成图。
被控对象是分配装置,而皮带输送机通常被用作载荷接受部分。
图1.5(d)所示为一台联合(分选组合)秤的系统构成图,通常以一些小的称量斗作为载荷接受部分,并且每个斗都装有一个用执行器控制的阀门。
这些阀门就是被控对象,而执行器即为控制元件操作部分。
对于图1.5(a)和1.5(b)中所示的秤,由于在测量质量的同时必须控制质量的流动状态,所以应采用反馈控制。
另一方面,对于图1.5(c)和(d)中所示的秤,由于对质量流动状态的控制是在测量质量之后进行的,所以基本上是进行顺序控制。
(a)料斗秤的系统框图(b)喂料秤的系统框图
(c)检重秤的系统框图(d)联合秤(分选组合秤)的系统框图
图1.5工业称重系统的构成框图
第2章秤的静力学
2.1杠杆的静力学
2.1.1杠杆的分类
通常把具有交点轴,载荷轴和力轴的直杠杆称为基本杠杆。
每个轴的位置分别被称为支点、重点和力点。
支点就是杠杆的支承点,杠杆可以围绕它转动。
重点和力点分别是载荷和力的作用点。
按照以上3个点的分布,可以把基本的杠杆分为3种类型,即第一类杠杆,第二类杠杆和第三类杠杆。
在图2.1所示的分类图中,F是支点,A是重点,B是力点,它们作用在同一直线上。
(a)第一类杠杆(b)第二类杠杆(c)第三类杠杆
图2.1杠杆的分类
按照联接杠杆的数量可以将杠杆(系)称为单一杠杆或复合杠杆(系)。
单一杠杆是独立的,例如天平的横梁,而复合杠杆则是由相关联的杠杆组合而成的一个杠杆系。
支点、重点和力点的数量,在一个杠杆上并不限于一个。
例如对于图2.2所示的杠杆,我们可以看作是一个双联杠杆,它有两个支点和两个重点。
包含这种双联杠杆的一个符合杠杆系,见图2.3所示。
图2.2双联杠杆
图2.3复合杠杆系
2.1.2单一杠杆
在实际应用中,杠杆在载荷作用下保持其静平衡位置的情况有两种:
第一,总是与空载下杠杆的平衡位置相一致(第一种情况);
第二,平衡位置随载荷而变化(第二种情况)。
当我们研究以上两种情况下的静平衡条件时,我们将杠杆设想为一个刚体。
(1)静平衡条件,单一杠杆保持平衡的必要和充分条件是
Σ(诸力)=0和Σ(诸力矩)=0(2.1)
为了研究单一杠杆在第一种情况和第二种情况下的静平衡条件,我们将上述充分必要条件应用于那些支点、力点和重点不在同一直线上的杠杆。
假设当载荷为零时,杠杆在初始力的作用下保持静平衡,如图2.4所示。
W0作用于A点,P0作用于B点,R0作用于F点,G作用于C点(重心)。
再假设当施加载荷W和反力P时,杠杆仍保持在相同的位置上。
那么,静平衡条件在加载前后即为
W0+P0+G+R0=0
W0a+P0b+Gc=0(2.2)
并且
(W0+W)+(P0+P)+G+(R0+R)=0
(W0+W)a+(P0+P)b+Gc=0(2.3)
式中,R是作用于F点的力的增量。
在图2.4中,我们必须考虑力的符号和作用点。
向下的力为正,而向上的力为负,以支点为原点,当力的作用点位于重点一方时为正,而位于力点一方时为负。
所以,逆时针方向的力矩为正,顺时针的力矩为负。
图2.4单一杠杆的静平衡条件
ADVANCEDWEIGHINGTECHNOLOGY
CHAPTER1FUNCTIONSANDSTRUCTURESOFSCALES
1.1BASICSTRUCTUREANDWEIGHINGPRINCIPLE
TwodifferenttypesofthemechanicalscaleareillustratedinFig.1.1.Whatarethecommonfeaturestothescalesinbasicstructureandweighingprinciple?
(a)Balance(b)Springscale
Figure1.1Mechanicalscale
InthebalanceorleverscaleillustratedinFig.1.1(a),themassoftheobjecttobemeasuredandlocatedattheloadplateiscomparedwiththemassoftheweightstobelocatesattheweightplateasthemomentsduetotheirgravityaroundthefulcrumbymeansoftheweighbeam.Thiscanbeconsideredacomparisonoftheforceduetotheloadofobjectwithcounterforceduetotheweights,bothactingontheweighbeam.AsforthespringscaleillustratedinFig.1.1(b),therestoringforceduetotheelongationofspringisconsideredthecounterforceorresistant.
Theaboveconsiderationleadsustotherecognitionthatthosescalescanbedividedintothreefunctionalelementsincommon,whicharetheloadreceivingelementorloadreceptor,theforcecomparingelementandthecounterforeelement.Theloadreceivingelement,suchadaloadplate,isaportionofthescalewhichreceivesanobjecttobemeasuredandappliestheforcecausedbythemassoftheobjecttotheforcecomparingelement.Thecounterforceelement,suchasaweightplatewithweightsoraspring,isaportionofthescalewhichdevelopsacounterforce,applyingittotheforcecomparingelement.Theforcecomparingelement,suchasaweighbeam,isaportionofthescaletowhichtheabovetwoforcesareapplied.
Whenexamininganytypesofthemechanicalscale,wenoticetheyhavetheabovestructureincommon.Then,thestructurecanberegardedasthebasicstructureofscales.Furthermore,themeasurementisbasedontheequilibriumintheforceduetothemassofanobjectandthecounterforcedevelopedinacounterforceelement.Therefore,theapplicationoftheequilibriuminforcescanberegardedastheweighingprincipleofscales.Themoderntechnologicaldevelopmentenablesustoapplynotonlythestaticequilibriumbutalsothedynamicequilibriuminforcesformassmeasurement.
Theloadtransmittingleversshouldbeincludedintheloadreceivingelement.Forthehopperscalewhosehopperisdirectlysupportedbyloadcclls,weshouldregarditasacasethattheforcecomparingelementisomitted.
Inthebalanceorleverscale,themeasuredvaluecanbeobtainedfromtheweightchangeinthecounterforceelement.Inthespringscalethemeasuredvaluecanbeobtainedfromtheelongationchangeofthespringasacounterforceelement.Generally,themeasuredvalueinthemechanicalscalecanbeobtainedbyusingsomequantitychangesdevelopedinthecounterforceelement.
1.2SYSTEMCONFIGURATIONOFELECTRICALANDELECTRONICSCALES
Amechanicalscaleisascaleinwhichallfunctionsincludingdisplayfunctionarerealizedbymechanicalmeans.Onthehand,anelectricalandelectricalscaleisascalewithatransducerwhichinvertsthechangedevelopedinthecounterforeelementtoanelectricalquantityandwithasignalprocessingdevicewhichprocessesthesignalofthatelectricalquantitytoobtainthemeasuredvalue.Therefore,theelectricalandelectronicscalearecharacterizedbythetransducersandsignalprocessingdevices.
Figure1.2showsthebasicsystemconfigurationoftheelectricalandelectronicscale.Theelectricalsignalconvertedwiththetransducerissenttothesignalprocessingdevicecomposingofthreefunctionalcircuits,whichareinputcircuit,dataprocessingcircuit,andoutputcircuit.Theinputcircuitfunctionalcircuits,whichareinputcircuit,dataprocessingcircuit,andoutputcircuit.Theinputcircuitisassociatedwiththecircuits,suchasfiltering,amplifyingandA/Dconvertingcircuits,whichmanipulatetheoutputsignalfromthetransducerintoamoreusablesignalfordataprocessing.Thedataprocessingcircuitisacircuitwhichprocessestheinputsignaltoobtainthemeasuredvalueandthenecessaryvaluesrelatedtothemeasurement.Theoutputcircuitisacircuitwhichsendouttheprocessedresults.
Figure1.2basicsystemconfigurationoftheelectricalandelectronicscale
Accordingtowhetherornottheyundertakethecounterforcesascounterforceelements,thetransducersareclassifiedintotwotypeswhicharethenoncounterforce-typeandthecounterforce-typetransducer,asshowninFig.1.3.
Figure1.3Classificationoftransducers
1.3FUNCTIONSANDSYSTEMCONFIGURATIONSOFTHESCALESFORINDUSTRIALUES
1.3.1FunctionalCharacteristicsandClassification
Thescalesmainlyusedforindustrialweighinghacethefollowingfeatures:
1)Theloadingonandunloadingfromtheloadreceivingelementareautomatic.
2)thedeterminationprocessofthemassvalueMoftheobjectbyusingitsweightWisautomatic.
ThesystemconfigurationofsuchscalesisshowninFig.1.4.Inaddition,mostofthescaleshavethefollowingfeature:
3)Thescalehasafunctionofmasscontrol.
ThenameandfunctionofrepresentativescalesforindustrialusearetabulatedinTable1.1
Table1.1Industrialscalesandtheirfunctions
Figure1.4Systemconfigurationofthe
scaleforindustrialuse
1.3.2ControlPurpose
Payingattentiontothedifferenceofthemassflowoftheobjectbeingfedontotheloadreceivingelementandthemassflowoftheobjectafterthemeasurement,wecouldsaythepurposeofthemasscontrolwrittenintable1.1ismassflowcontroloftheobject.Fromthispointofview,thecontrolpurposeofthehopperscaleortheweighpackeristoattainanintermittentfloweachamountofwhichispre-determined.Theassociative(selectivecombination)weigherisalsoregardedasthistypeofcontrol.Thecontrolpurposeofthecheckweigheristoattainthedivergingflowsaccordingtothepre-determinedgradesinmass.Asfortheweighfeeder,thepurposeistoattainaflowofpre-determinedflowrateinmassortoattainaflowthetotalamountofwhichcoincideswiththepre-determinedvalue.
1.3.3SystemConfigurations
Generally,acontrolsystemiscomposedofacontrolledobject,detectingmeans,controllingmeansorcontrollerandcontrolelement
 升级会员
升级会员 