高阶系统分析与设计Word下载.docx
《高阶系统分析与设计Word下载.docx》由会员分享,可在线阅读,更多相关《高阶系统分析与设计Word下载.docx(20页珍藏版)》请在冰豆网上搜索。
分析、计算
2
编写程序
撰写报告
论文答辩
0.5
指导教师签名:
年月日
系主任(或责任教师)签名:
目录
摘要1
1.理论基础2
1.1闭环系统2
1.2根轨迹2
1.3波特图2
1.4Nyquist曲线2
2.
时,绘制根轨迹2
2.1根轨迹绘制步骤3
2.2手绘根轨迹3
2.3用MATLAB绘制根轨迹4
3.求-2为闭环系统的一个极点时的K值5
4.绘制Bode图和Nyquist曲线以及幅值裕度相角裕度求取5
4.1Bode图绘制6
4.1.1Bode图绘制步骤6
4.1.2手绘Bode图6
4.1.3MATLAB绘制Bode图6
4.2绘制Nquist曲线7
4.2.1绘制Nquist曲线步骤7
4.2.2手绘Nquist曲线8
4.2.3MATLAB绘制Nquist曲线8
4.3求幅值裕度和相角裕度9
5.能否用滞后校正装置改善该Ⅱ系统的稳定性?
10
6.系统稳态系数与稳态误差计算10
6.1稳态误差的计算10
6.2求取系统稳态误差系数11
6.3输入信号为
时的稳态误差11
7.设计超前校正装置12
7.1无源超前校正装置12
7.2确定校正函数13
7.2.1校正前后bode图的绘制13
7.2.2校正装置参数设置14
8.用MATLAB绘制校正前后的单位阶跃响应曲线15
8.1校正前系统单位阶跃响应曲线的绘制15
8.2校正后单位阶跃响应曲线的绘制15
8.3校正前后稳定性分析16
小结与体会17
参考文献18
摘要
在控制工程中,高阶系统非常普遍,例如在航天领域,其动态性能指标的确定是比较复杂,不能像一阶、二阶系统那样可以用特定的公式计算。
我们可以借助闭环主导极点和MATLAB软件对高阶系统进行分析。
在课程设计中,我们不仅要掌握用MATLAB绘制闭环系统根轨迹和和系统响应曲线,还要掌握BODE图和Nyquist曲线的绘制。
以及在比较点与开环传递函数之间加一个非线性环节后用负倒描述函数和Nyquist曲线判断系统的稳定性。
通常在阶跃函数作用下,测定系统的动态稳定性,一般认为,阶跃输入对系统来说是最严峻的工作状态,如果系统在阶跃输入作用下能满足动态性能的要求,那么系统在其他形式函数作用下也能满足要求。
关键词:
高阶系统根轨迹阶跃响应传递函数
1.理论基础
1.1闭环系统
输出量直接或间接地反馈到输入端,形成闭环参与控制的系统成为闭环控制系统。
也叫反馈控制系统。
为了实现闭环控制,必须对输出量进行测量,并将测量的结果反馈到输入端与输入量进行相减得到偏差,再由偏差产生直接控制作用去消除偏差。
整个系统形成一个闭环。
对于自动控制系统而言,闭环系统,在方框图中,任何一个环节的输入都可以受到输出的反馈作用。
控制装置的输入受到输出的反馈作用时,该系统就称为全闭环系统,或简称为闭环系统。
1.2根轨迹
根轨迹是开环系统某一参数从零变化到无穷大时,闭环系统特征根在s平面上变化的轨迹。
根轨迹由180度、0度和参量根轨迹。
1.3波特图
波特图是线性非时变系统的传递函数对频率的半对数座标图,其横轴频率以对数尺度(logscale)表示,利用波特图可以看出系统的频率响应。
波特图一般是由二张图组合而成,一张幅频图表示频率响应增益的分贝值对频率的变化,另一张相频图则是频率响应的相位对频率的变化。
1.4Nyquist曲线
系统稳定是指系统的全部闭环特征根均在s平面的左半平面,这等价于若系统稳定则在右半平面上没有任何闭环特征根。
从这一事实出发,为利用辐角定理检验右半平面上是否有闭环特征根,我们可以定义辐角定理中的D=D1为包含原点的s平面的右半平面,它由整个虚轴(经过原点)和一个无穷大半圆组成。
若考虑系统的型别,则可定义D=D2为不包含原点的s平面的右半平面,它由正虚轴、无穷小半圆(不直接经过原返航点,而是通过这个无穷小半圆绕过原点)、负虚轴和一个无穷大半圆组成。
这样定义的封闭曲线D(D1,D2)就是所谓的Nyquist围线。
时,绘制根轨迹
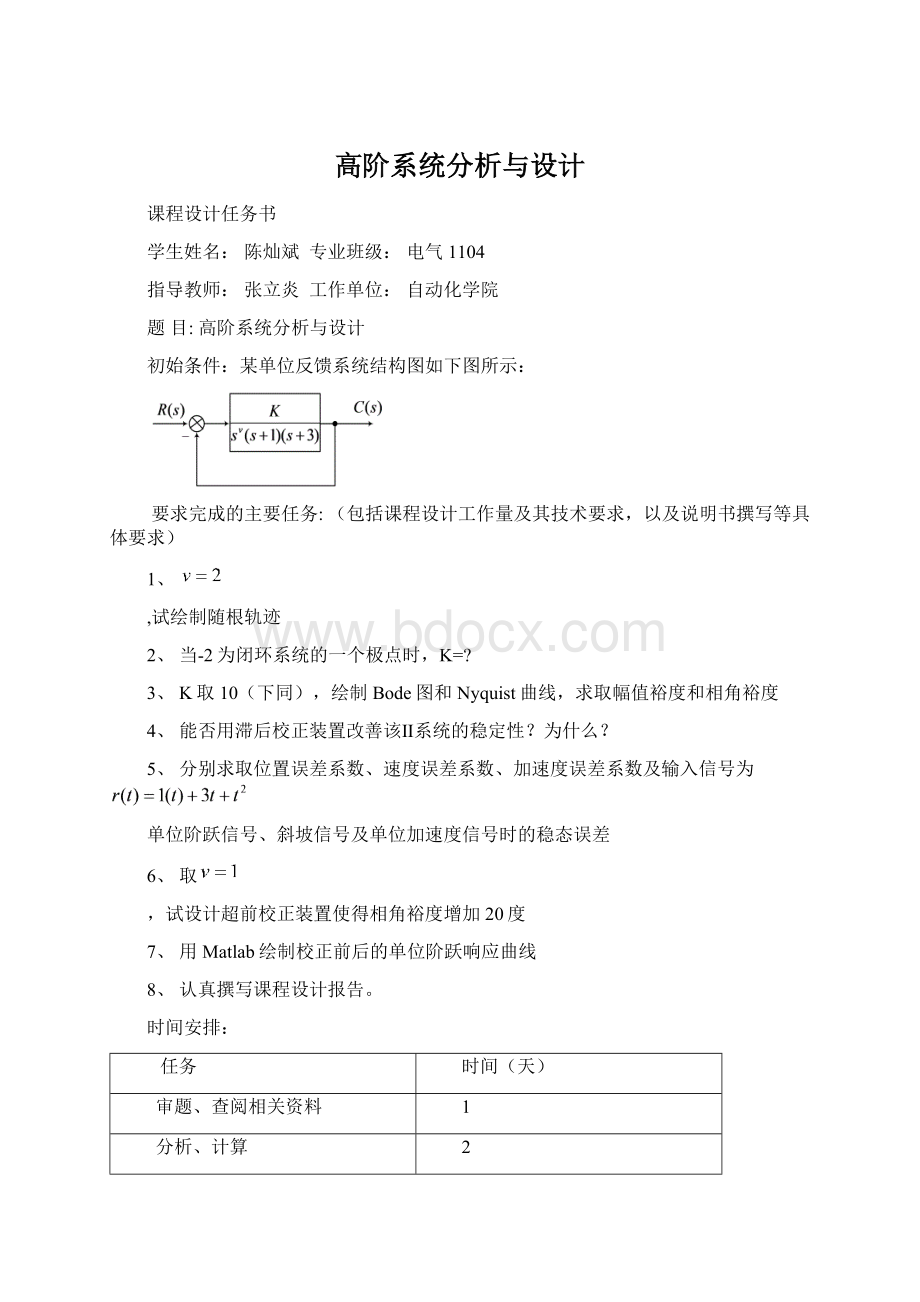
单位反馈系统结构图如图2-1所示:
图2-1单位反馈系统结构图
2.1根轨迹绘制步骤
取k=1,绘制根轨迹:
(1)确定实轴上的根轨迹为(-3,-1)
(2)开环零、极点个数分别为m=0、n=4,则有4条根轨迹,极点分别为0、0、-1、-3。
(3)确定根轨迹的渐近线。
渐近线与实轴的交角:
=
;
渐近线与实轴的交点:
=-1。
(4)确定分离点。
分离点的坐标d:
且分离角为:
。
本例中分离点d=-2.37,分离角为
(5)与虚轴的交点。
若根轨迹与虚轴相交,则交点上的K值和
值可用劳斯判据确定,可令闭环特征方程中的
,然后分别令其实部和虚部为零而求得。
代入得本例中与虚轴交点为
2.2手绘根轨迹
根据2.1中的步骤得手绘根轨迹如图2-2:
图2-2手绘根轨迹
2.3用MATLAB绘制根轨迹
令k=1编辑程序如下:
num=1;
den=[1,4,3,0,0];
rlocus(num,den);
运行程序根轨迹如图2-3所示
图2-3matlab绘制根轨迹
3.求-2为闭环系统的一个极点时的K值
方法一:
直接代入法
当-2为闭环系统的一个极点时,带入闭环特征方程
解得K=4;
方法二:
MATLAB制图法
当闭环极点为-2时,由MATLAB绘制的根轨迹可得在闭环极点为-2时其对应的K值为3.98,如图3-1所示
图3-1根轨迹
4.绘制Bode图和Nyquist曲线以及幅值裕度相角裕度求取
4.1Bode图绘制
4.1.1Bode图绘制步骤
①原式化为
,K=10/3,低频环节过(1,20lgK)
②
转折频率
ω1=1,惯性环节,斜率-60dB/dec,ω2=3,惯性环节,斜率-80dB/dec
③绘制低频段渐进特性曲线:
ω<
ω1,k=-40dB/dec
④绘制频段ω1<
ω2曲线,k=-60dB/dec
⑤绘制频段ω2<
ω,k=-80dB/dec
4.1.2手绘Bode图
根据4.1.1中的步骤,手绘Bode图如图4-1:
图4-1手绘Bode图
4.1.3MATLAB绘制Bode图
当K=10时,由系统的开环传递函数
其分子系数为10,分母系数分别为1,4,3,0,0。
利用MATLAB程序可编以下程序:
num=10;
bode(num,den);
在MATLAB程序中输入此程序,运行后得到Bode图如图4-2:
图4-2matlab绘制Bode图
4.2绘制Nquist曲线
4.2.1绘制Nquist曲线步骤
(1)开环幅相曲线起点:
A(0+)=∞,φ(0+)=
(2)开环幅相曲线终点:
A(∞)=0,φ(∞)=
(3)曲线与虚轴有一交点(0,j4.8),终于零点。
4.2.2手绘Nquist曲线
根据4.2.1步骤手绘Nquist曲线如图4-3:
图4-3手绘Nquist曲线
4.2.3MATLAB绘制Nquist曲线
nyquist(num,den);
在MATLAB程序中输入此程序,运行后得到Nquist曲线如图4-4:
图4-4MATLAB绘制Nquist曲线
4.3求幅值裕度和相角裕度
可得其分子系数其分子系数为10,分母系数分别为1,4,3,0,0
利用MATLAB程序可编以下程序,得图4-5结果
num=10;
den=[1,4,3,0,0];
margin(num,den)
图4-5Bode图
在MATLAB程序中输入此程序并运行后得到结果,相角裕度和幅值裕度分别为
Gm=inf,Pm=-
答:
不可以,滞后校正主要是利用其在高频段的幅值衰减特性,以降低系统截止频率,提高系统的相位裕量,而本例中系统幅值Bode图低频段的斜率就是-40dB/dec,幅值衰减比较多,用滞后校正改善该系统,时间常数T很大不易实现,而且效果不明显。
6.系统稳态系数与稳态误差计算
6.1稳态误差的计算
系统结构图如图6-1所示,系统反馈为单位反馈,所以得到其误差信号:
图6-1单位反馈结构图
又由其闭环传递函数
可得到误差信号
即
由拉氏变换的终值定理可得系统的稳态误差
系统稳态误差计算通式则可表示为
本例中传递函数
6.2求取系统稳态误差系数
a)位置误差系数
可得到
b)速度误差系数
c)加速度误差系数
时的稳态误差
本例中输入
,其拉氏变换为
,由上述得到
,
,可得稳态误差
7.设计超前校正装置
7.1无源超前校正装置
如图7-1所示,图为由电阻和电容所组成的无源超前校正网络的电路图,其传递函数为:
Gc(s)=Uc(s)/Ur(s)=(R2(1+R1Cs)/(R1+R2))/((R1+R2+R1R2Cs)/(R1+R2))=(aTs+1)/a(Ts+1)
其中T=R1R2C/(R1+R2),a=(R1+R2)/R2。
图7-1无源超前校正网络
采用无源超前网络进行串联校正时,整个系统的开环增益要下降a倍,因此需要提高放大器增益加以补偿,如图8-2所示,此时的传递函数为:
Gc(s)=Uc(s)/Ur(s)=(aTs+1)/(Ts+1)
图7-2带有附加放大器的无源超前校正网络
由上式可得,无源超前校正网络的对数频率特:
20lg|aGc(s)|=20lg|1+aTw|-20lg|1+Tw|
c(w)=arctanaTw-arctanTw
画出对数频率特性,观察图形知超前网络对频率在1/aT和1/T之间的输入信号有明显的微分作用,在该频率范围内输出信号相角比输入信号相角超前。
7.2确定校正函数
7.2.1校正前后bode图的绘制
校正前的Bode图如图7-3所示
执行程序如下:
den=[1,4,3,0];
margin(num,den);
图7-3校正前Bode图
由校正前Bode图可知
=4.6°
,所以取
=24.6°
使
=10°
则φm=
=20°
+10°
=30°
则a=(1+sinφm)/(1-sinφm)=3。
则超前校正装置在
处的幅值为:
10lga=10lg3=4.77dB
据此,在为校正系统的开环对数幅值为-4.77dB,对应的频率计算如下:
=-4.77,
=2.05=1/T*
,得T=0.282
则Gc(s)=(0.846s+1)/(0.282s+1)
系统校正后的开环传递函数为:
校正后的Bode图如图7-4所示
执行程序如下所示:
nun=[8.46,10];
den=[0.282,2.128,4.846,3,0];
执行后相角裕度为21.1°
,满足要求。
图7-4校正后的Bode图
7.2.2校正装置参数设置
因为T=R1R2C/(R1+R2)=0.282,a=(R1+R2)/R2=3,因此可以设C=1
则可算得:
R1=846Ω,R2=423Ω.
8.用MATLAB绘制校正前后的单位阶跃响应曲线
8.1校正前系统单位阶跃响应曲线的绘制
系统校正前的开环传递函数如下所示:
闭环传递函数
程序如下所示:
num=[10];
den=[1,4,3,10];
sys=tf(num,den);
step(sys);
单位阶跃响应曲线如8-1所示
图8-1校正前阶跃响应曲线
8.2校正后单位阶跃响应曲线的绘制
校正后的系统的开环传递函数如下所示
闭环传递函数
程序如下:
num=[8.46,10];
den=[0.282,2.128,4.846,11.46,10];
单位阶跃响应曲线如图8-2所示
图8-2校正后单位阶跃响应曲线
8.3校正前后稳定性分析
校正前系统的上升时间很快,但超调量也很大,调节时间也很长校正后系统在单位阶跃输入作用下调节时间减小,超调量也得到改善,系统稳定性明显加强。
小结与体会
这次课程设计设计运用了许多课本上的知识,书上理论知识的运用,让我更加熟悉和了解了书本上的知识,对课本的知识再一次的加深了印象。
同时在课程设计过程中主要还运用了MATLAB这个软件,是工作量大为减少,也让我进一步掌握这个软件。
还有在这次课设中,让我们要将理论知识运用到实际问题中,这是要求我是比仅仅学习知识更高层次的要求,而在这次实习中得到了很好的锻炼。
平时学习生活中,由于没有动力去学习一款新的软件的使用,只是在之前基础强化训练中运用过MATLAB,只掌握了皮毛,而这次课设,指定了要使用Matlab分析和仿真,这又使我提起很高的兴趣去了解它,发现了这个软件的强大之处,它可以免去连接实物去验证结果的正确性,可以确保得出的结果的正确性,熟练的使用这款工具可以确保最后结果的正确性。
这次课程设计也锻炼了我们的细心和耐心,这尤其体现在我们课程设计报告的格式上排版上,很多人格式上不过关,关键是他们太浮躁,不能细心地对待。
格式很重要,不然,美观切不说,报告看上去很混乱,不易于阅读。
严格的格式要求也是在培养我们的做事态度。
我也很感谢有课程设计这次机会,让我明白了这么多从前不知道的东西。
这些对我日后的工作都是十分宝贵的。
同时也让我看清了自己,明白了自己哪里欠缺。
总之这次课设我收获良多,不仅仅是自动控制原理这门课的知识上,还有自己的各方面的综合素质。
我相信这些在以后的学习生活中都会有很大帮助的,每次实践的机会都应该好好把握,为自己打下良好基础。
参考文献
[1]胡寿松.自动控制原理(第六版).北京:
科学出版社.2007
[2]张静.MATLAB在控制系统中的应用.北京:
电子工业出版社.2007
[3]张爱民.自动控制原理.北京:
清华大学出版社.2005
[4]王广雄.控制系统设计.北京:
[5]黄坚主.自动控制原理及其应用.北京:
高等教育出版社2004
 升级会员
升级会员 