机械原理课程设计自动喂料搅拌机装置设计Word下载.docx
《机械原理课程设计自动喂料搅拌机装置设计Word下载.docx》由会员分享,可在线阅读,更多相关《机械原理课程设计自动喂料搅拌机装置设计Word下载.docx(13页珍藏版)》请在冰豆网上搜索。
同时,固连在容器内拌勺点按一定轨迹运动,将容器中拌料均匀搅动。
物料的喂料动作为:
物料呈粉状或粒状定时从漏斗中漏出,输料持续一段时间后漏斗自动关闭。
喂料机的开启、关闭动作与搅拌机同步。
位置号
i
1
2
3
4
5
6
7
8
方案D
X
505
493
475
373
196
75
13
185
Y
332
524
763
660
480
225
103
表1拌勺E的搅拌轨迹数据表
方案号
固定铰链A、D位置
电动机转速
r/min
容器转速
每次搅拌时间
s
物料装入容器时间
mm
D
1735
420
1200
720
60
100
表2自动喂料搅拌机运动分析数据表
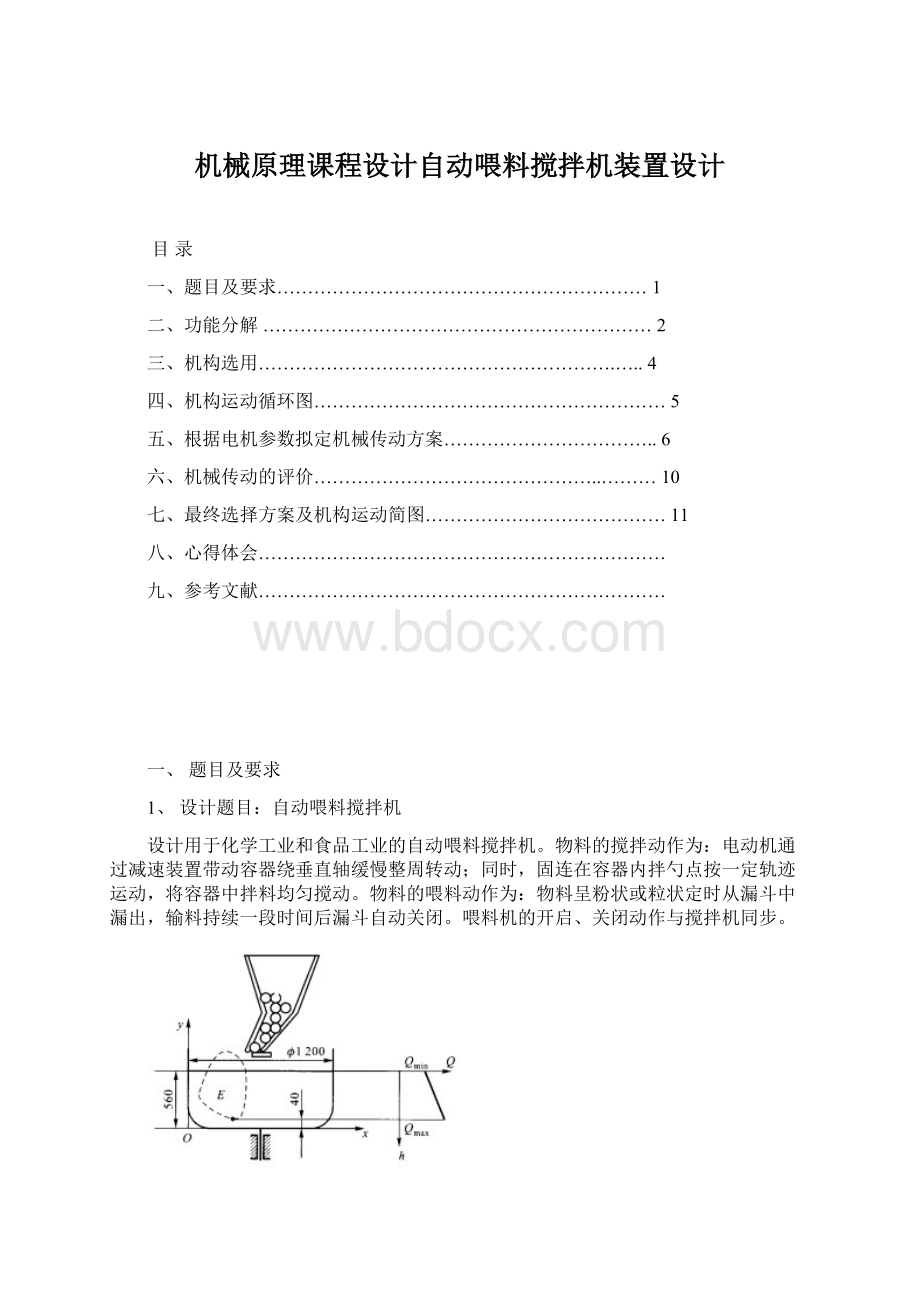
2、功能要求:
a、要求物料的搅拌动作为:
电动机通过减速装置带动容器饶垂直轴缓慢整周转动;
同时固连在容器内拌勺将容器中拌料均匀搅动。
b、要求喂料动作为:
物料呈粉状或颗粒状定时从漏斗中漏出,输料持续一段时间后漏斗自动关闭。
c、喂料机的开启、关闭动作要和搅拌机同步。
物料搅拌好后的输出不考虑。
3、设计说明书内容要求:
a、本设计应包括连杆机构、凸轮机构、齿轮机构等三种常用机构。
b、设计传动系统并确定其传动比分配,画出机器运动循环简图。
c、机构的造型及实现配合,选择和评价运动方案。
d、根据电机参数拟定机械传动方案,画出运动简图。
4、设计提示
a、此题包含较丰富的机构设计与分析内容,如平面连杆机构实现运动轨迹的设计、平面连杆机构的运动分析与动态静力分析、飞轮转动惯量确定,以及齿轮机构设计、凸轮机构设计等。
由于题量较大,教师可根据情况确定全部或部分完成该题的设计任务,也可以由一组学生完成全题。
b、可使固联在铰链四杆机构连杆上的某点作为拌勺的E点,实现预期的搅料轨迹。
由于E点轨迹仅要求实现8点坐标,可以用多种方法设计该平面连杆机构。
二、功能分解:
1.容器带动里面的物料一起做匀速转动,是电动机带动减速装置,减速装置在带动直轴容器缓慢进行整周转动实现的。
2.在电动机带动下拌勺沿搅拌数据表要求的轨迹搅拌,是由曲柄四杆机构转动实现。
3.在电动机带动下实现填料机自动填料的功能,是利用凸轮机构实现滑块左右移动,并保证在搅拌的同时,实现滑块开50s,关40s,如此循环的进行。
三、机构运动循环图:
图
(1)以设计要求的时间(s/t)为参考
图
(2)拌勺的搅拌轨迹
四、机构选用
1.容器周转机构选用
1—电动机,2、4—传动轴,3—减速器,5,6—圆锥齿轮,7—容器
该机构是容器的周转机构,容器的转动运用了锥齿轮。
动力由电动机1输入,通过2传动轴的转动带动3减速器转动,减速器带动传动轴4传给圆锥齿轮5,锥齿轮5带动锥齿轮6的转动,从而使与锥齿轮6同心的容器7转动,从而带动容器7的转动。
2.拌勺运动机构选用
1—拌勺,2、3、4—连杆,5—偏心轮
拌勺的运动选用了连杆机构。
偏心轮5的运动带动连杆(4、3、2)的运动,同时带动了1拌勺的运动。
3.填料盒开关机构选用
1—齿轮,2、3—连杆,4—滑块,5物料盒
此机构为填料盒开关的选用机构。
利用了齿轮、连杆、滑块机构来达到控制开关的能力。
齿轮1的匀速转动,带动连杆2上下运动,连杆2带动连杆3的运动,从而使滑块4左右滑动,起到控制填料盒5开关的功能。
4.电动机带动填料盒开关和拌勺运动机构选用
1—电动机,2、4—传动轴,3—减速器,5—蜗轮,6、8—齿轮,7—偏心轮
此机构为控制填料盒开关和拌勺机构的选用机构。
运用了电动机、涡轮蜗杆、齿轮、偏心轮、减速器达到控制的目的。
动力由电动机1转动,通过传动轴2转动传给减速器3带动传动轴4转动,同时带动与涡轮5带动齿轮6转动,6带动偏心轮7转动,从而带动固定在齿轮8上的连杆转动。
4.输出部分机构选用
1—电动机,2—减速器,3—蜗轮,4、6—圆锥齿轮,5—凸轮,7、8—齿轮,9—连杆,10—勺子
采用涡轮蜗杆、一对齿轮及圆锥齿轮来实现输出机构。
发动机1带动减速器2转动,减速器2在带动蜗轮3转动,蜗轮3带动凸轮5及圆锥齿轮4转动,圆锥齿轮4带动齿轮8转动,齿轮8带动齿轮7转动,实现勺子的移动,然而凸轮5的转动实现连杆9用勺子10去把搅拌物料舀出,完成输出。
五、根据电机参数拟定机械传动方案
方案
(一)
1—电动机,2—减速器,3、5—蜗轮,4、13、19—圆锥齿轮,6、8、17、18—齿轮,7—偏心轮,21、12、16—连杆,9—滑块,10物料盒,14、15—拌勺,11—容器,20—凸轮
此方案的传动过程:
动力由电动机1输入,传给减速器2,再由减速器2带动蜗轮3,蜗轮3在带动圆锥齿轮4,圆锥齿轮4带动圆锥齿轮13转动,在带动容器11的均匀的转动。
同时圆锥齿轮4带动蜗轮5的转动,带动固定齿轮6转动,带动固定偏心轮7的转动,同时带动四杆机构带动搅拌勺的上下、左右的运动,从而实现搅拌的目的。
同时固定偏心轮7也带动固定齿轮8的转动,也带动了固定在齿轮的连杆的运动带动滑块9左右的运动,从而实现控制物料盒10开关的目的。
蜗杆3转动带动固定凸轮20的转动,从而使另一个锥齿轮及齿轮18转动,齿轮18转动同时带动齿轮17转动带动固定在涡轮上的凸轮转动,使连杆上下运动,当凸轮从最高点转到最低点时,取料勺进入容器装入物料;
当凸轮转到最高点时,取料勺转出容器,同时控制取料勺的开与合,使物料从容器中输出。
六、机械传动的评价
方案一:
优点:
①涡轮蜗杆传动结构紧凑,体积小、重量轻;
工作平稳,
冲击震动、噪音小。
②圆锥齿轮平稳,噪声小。
③齿轮传动能保证瞬时传动比恒定,平稳性较高,传递运动准确可靠
;
可实现较大的传动比;
传动效率高,使用寿命长。
④凸轮机构可以使推杆得到各种预期的运动规律,且响应速度快,机
构简单紧凑。
⑤连杆机构压力较小,承载能力较大,润滑好,摩擦小,加工制造容
易,工作性可靠,在原动件运动规律不变的条件下,可改变各构件的
相对长度来使从动件得到不同的运动规律;
可方便地达到改变运动传
递运动方向、扩大行程、实现增强和远距离传动的目的。
⑥滑块的加工比较容易控制在装配与拆卸时滑块也是相对比较方便
的。
缺点:
①涡轮蜗杆蜗杆传动效率低,一般认为蜗杆传动效率比齿轮传动低,发热量大,齿面容易磨损,成本高。
②圆锥齿轮传递效率低,制造复杂,成本高。
③齿轮制造及安装精度要求高,价格较贵,且不宜用于传动距离过大的场合。
④凸轮轮廓线与推杆之间为点、线接触,易磨损,制造也困难,而且从经济角度来说也很不划算,造价高昂。
⑤连杆机构易产生较大的误差积累,机械效率降低;
不宜用于高速运动。
⑥滑块面与面的接触,易磨损,易产生热量大。
方案二、
0、电动机1、飞轮2、减速器3、减速器4、容器
5、拌勺E点运动轨迹6、铰链四杆机构7、漏斗8、齿轮
9、齿轮10、蜗轮蜗杆11、蜗轮蜗杆12、锥齿轮
13、锥齿轮14、蜗轮15、蜗杆
1、蜗轮蜗杆传动结构紧凑,体积小、重量轻;
工作平稳,冲击震动、噪音小,有较大的传动比,使得6齿轮的齿数合理,不至于过大。
2、齿轮传动能保证瞬时传动比恒定,平稳性较高,传递运动准确可靠;
传递的功率和速度范围大;
结构紧凑、工作可靠,可实现较大的传动比;
3、圆锥齿轮平稳,噪声小,且可以改变传递方向。
4、凸轮机构可以使推杆得到各种预期的运动规律,而且响应速度快,机构简单紧凑。
5、连杆机构压力较小,承载能力较大,润滑好,摩擦小,加工制造容易,工作性可靠。
6、可以保证相对精确的传动比。
缺点:
1、圆锥齿轮传递效率低,制造复杂,成本高。
2、蜗轮蜗杆蜗杆传动效率低,蜗杆传动效率比齿轮传动低,发热量大,齿面容易磨损,成本高。
4、凸轮轮廓线与推杆之间为点、线接触,易磨损,制造也困难。
5、连杆机构易产生较大的误差,机械效率降低。
6、必须保证铰链四杆机构和凸轮运动时的位置和角度关系,所以导致制造困难。
7、物料的输出装置与搅拌装置无法准确协调。
方案三、
七、最终选择方案及机构运动简图
0、电动机1、飞轮2、减速器3、减速器4、容器5、拌勺E点运动轨迹6、铰链四杆机构7、漏斗8、齿轮9、齿轮10、蜗轮蜗杆11、蜗轮蜗杆12、锥齿轮
八、心得体会
做了很久的机械原理课程设计作业今晚终于完成了,心里有些小开心,开始做时,发现到处都是难题,这也不懂那也不懂,心有些辛酸和无奈,学习了一个学期的机械原理后,自己却似乎什么都不会,觉得有些惭愧,老师在课堂上很专心、耐心的给我们讲,可我还是很不会,是自己在课后花在学习上的时间太少了。
当我真的开始做时,我查了很多资料,很茫然的开始做。
在做的过程中,培养了我自己自学的能力,独立思考问题,解决问题的能力。
很多时候,不是我们完全不会,而是我们没有用心,态度不端正所造成的。
就拿我来说,我本该早做好了的,可每天都在打着做课程设计的幌子,去完毕的东西,时间渐渐地过去,非得老师说截止时间是多少,才会开始去做,而且效率很高。
这也就会产生为了应付老师而随便做做的,老师说不行再拿回来仔细做,也就这样渐渐地把这个设计弄得很熟悉,也就知道了这个机构是怎样运行的。
人很多时候会产生很强的惰性,使得自己不会认真的去做某件事,这就影响了人生的道路。
所以不管做什么事,我们都应该积极的努力地去做好,不要想着有巧合。
此次的课程设计让我明白了很多道理,人一定要有一颗平和的心态,不管遇到什么事,都要努力不怕困难的应对。
还有就是不要太浮躁,越是浮躁越是误事。
还有就是自信才会使自己在困境中挺身而出,获得成功。
九、参考文献
1.《机械设计基础课程设计》孙德志张伟华编科学出版社
2.《机械原理》孙恒主编高等教育出版社
3.《工程制图与AoutCAD绘图基础》王鸿钧编中国水利水电出版社出版
 升级会员
升级会员 