机器人技术大作业(puma机器人的关节坐标建立、D-H参数表给出、正逆运动学推导、matlab工作空间建立).docx
《机器人技术大作业(puma机器人的关节坐标建立、D-H参数表给出、正逆运动学推导、matlab工作空间建立).docx》由会员分享,可在线阅读,更多相关《机器人技术大作业(puma机器人的关节坐标建立、D-H参数表给出、正逆运动学推导、matlab工作空间建立).docx(7页珍藏版)》请在冰豆网上搜索。
PUMA机器人大作业
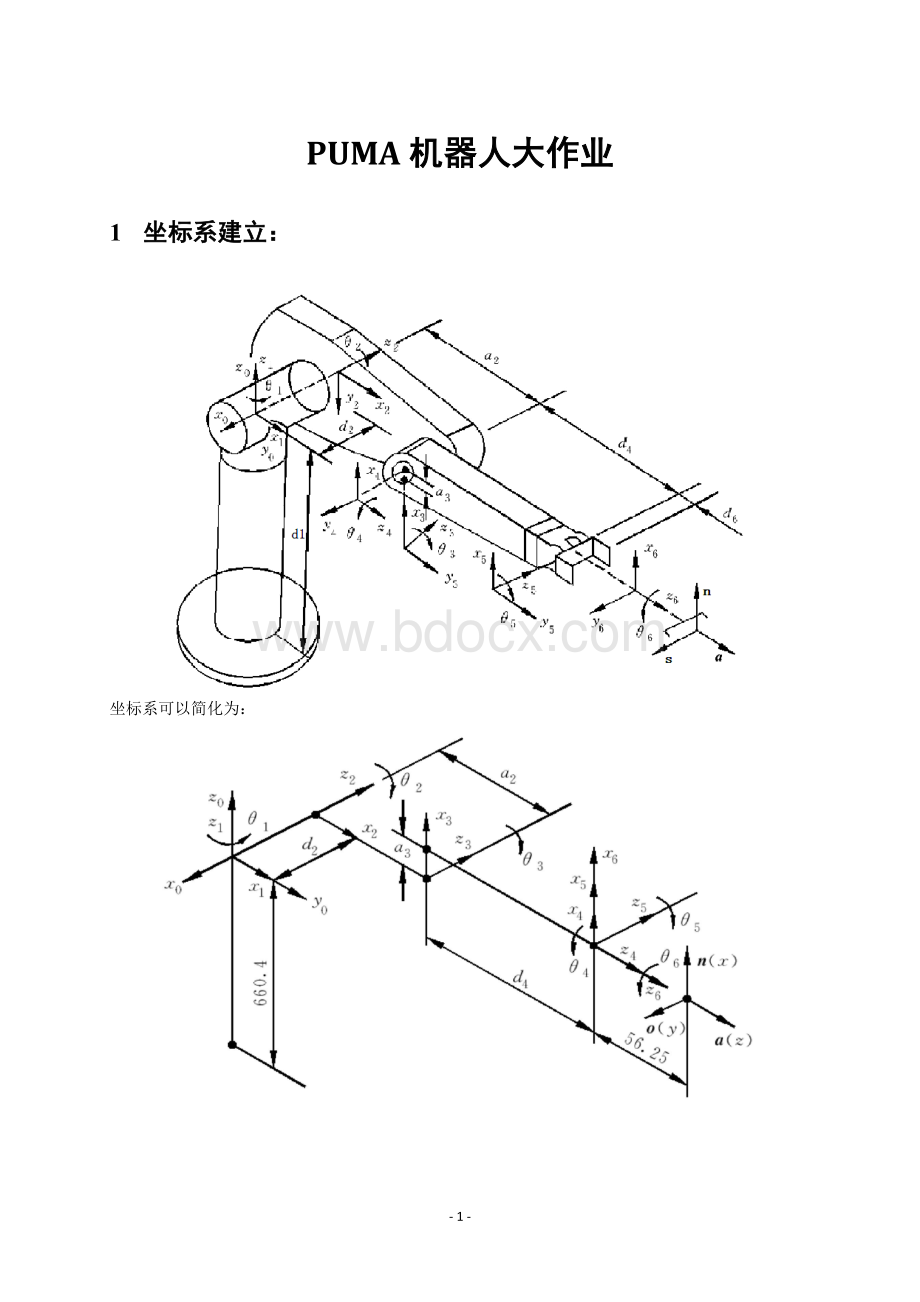
1坐标系建立:
坐标系可以简化为:
2D-H参数表:
PUMA机器人的杆件参数:
,,,,,
关节
运动范围
1
90
0
0
0
-160o~160o
2
0
-90
0
-225o~45o
3
-90
0
0
-45o~225o
4
0
-90
-110o~170o
5
0
90
0
0
-100o~100o
6
0
-90
0
-266o~266o
3正运动学推导
由式可得:
,,,,
机械手变换矩阵
4逆运动学推导
1.求
用逆变换左乘方程两边:
得
三角代换,
式中,,
得到的解
2.求
矩阵方程两端的元素(1,4)和(2,4)分别对应相等
平方和为:
其中
解得:
3.求
在矩阵方程两边左乘逆变换。
方程两边的元素(1,4)和(3,4)分别对应相等,得
联立,得和
和表达式的分母相等,且为正,于是
根据解和的四种可能组合,可以得到相应的四种可能值,于是可得到的四种可能解
式中取与相对应的值。
4.求
令两边元素(1,3)和(2,3)分别对应相等,则可得
只要,便可求出
当时,机械手处于奇异形位。
5.求
根据矩阵两边元素(1,3)和(2,3)分别对应相等,可得
6.求
根据矩阵两边元素(2,1)和(1,1)分别对应相等,可得
从而求得
5Matlab编程得出工作空间
可以将连杆6的原点做为机器人的动点,连杆6原点相对于坐标系0就是的、、,已知:
Matlab程序如下:
clc,clear
length2=431.8;length3=20.32;
d2=149.09;d4=433.07;
a=pi/180;
fora1=-160*a:
20*a:
160*a
fora2=-225*a:
20*a:
45*a
a3=-45*a:
20*a:
225*a
fork=1:
length(a3)
px(k)=cos(a1)*(length2*cos(a2)+length3*cos(a2+a3(k))-d4*sin(a2+a3(k)))-d2*sin(a1)
py(k)=sin(a1)*(length2*cos(a2)+length3*cos(a2+a3(k))-d4*sin(a2+a3(k)))+d2*cos(a1)
pz(k)=-a3(k)*sin(a2+a3(k))-length2*sin(a2)-d4*cos(a2+a3(k))
end
plot3(px,py,pz),title('机器人的工作空间'),xlabel('xmm'),ylabel('ymm'),zlabel('zmm')
holdon
gridon
end
end
机器人工作空间——三维空间:
-7-
 升级会员
升级会员 