控制理论离线作业.doc
《控制理论离线作业.doc》由会员分享,可在线阅读,更多相关《控制理论离线作业.doc(130页珍藏版)》请在冰豆网上搜索。
浙江大学远程教育学院
《控制理论》课程作业
姓名:
学号:
年级:
学习中心:
—————————————————————————————
第一章
1-1与开环系统相比,闭环系统的最大特点是:
检测偏差,纠正偏差。
1-2分析一个控制系统从以下三方面分析:
稳定性、准确性、快速性。
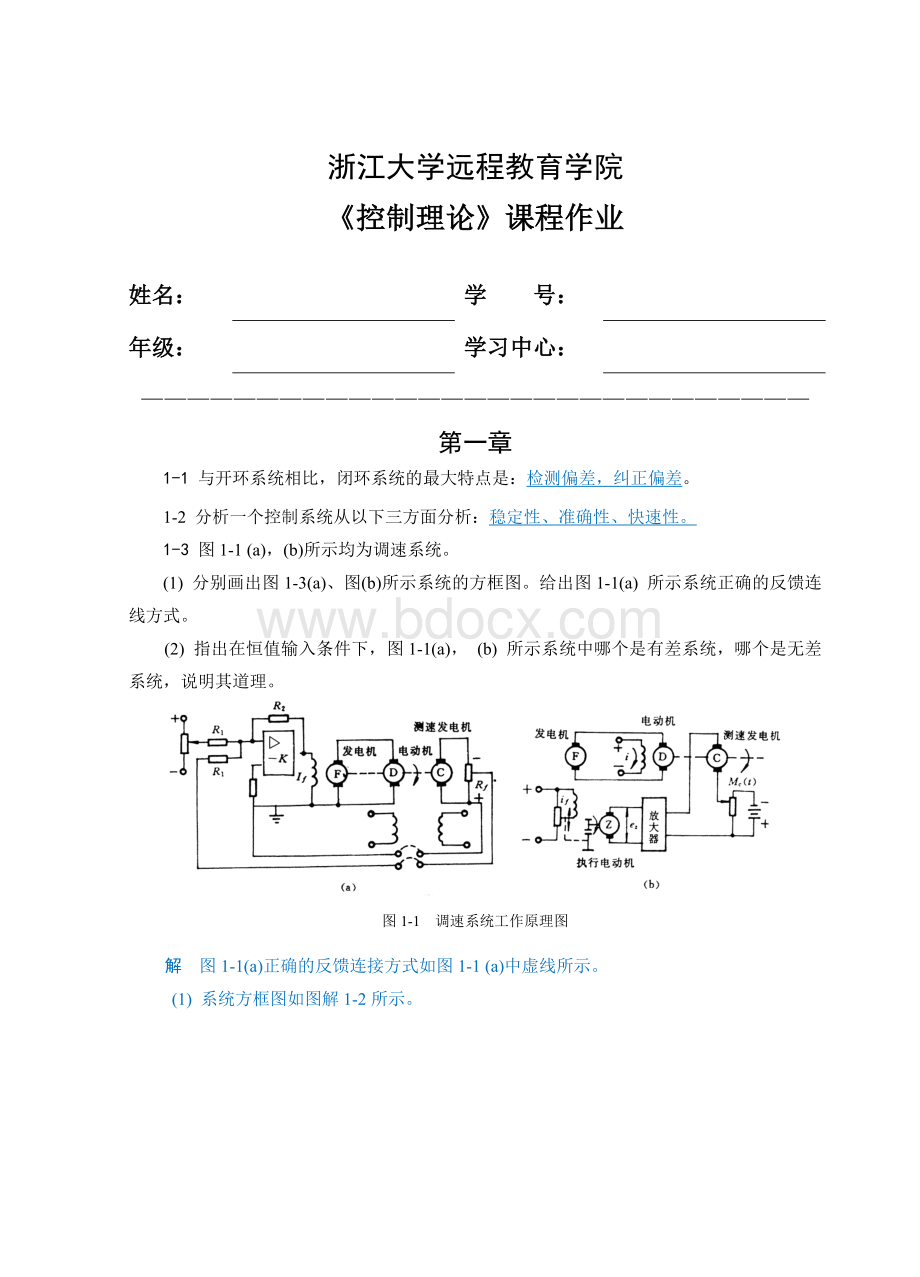
1-3图1-1(a),(b)所示均为调速系统。
(1)分别画出图1-3(a)、图(b)所示系统的方框图。
给出图1-1(a)所示系统正确的反馈连线方式。
(2)指出在恒值输入条件下,图1-1(a),(b)所示系统中哪个是有差系统,哪个是无差系统,说明其道理。
图1-1调速系统工作原理图
解图1-1(a)正确的反馈连接方式如图1-1(a)中虚线所示。
(1)系统方框图如图解1-2所示。
(2)图1-1(a)所示的系统是有差系统,图1-1(b)所示的系统是无差系统。
图1-1(a)中,当给定恒值电压信号,系统运行达到稳态时,电动机转速的恒定是以发电机提供恒定电压为条件,对应发电机激磁绕组中电流一定是恒定值。
这意味着放大器前端电压是非零的常值。
因此,常值偏差电压存在是系统稳定工作的前提,故系统有差。
图1-1(b)中,给定恒定电压,电动机达到稳定转速时,对应发电机激磁绕组中的励磁电流恒定,这意味着执行电动机处于停转状态,放大器前端电压必然为0,故系统无差。
1-4图1-3(a),(b)所示的系统均为电压调节系统。
假设空载时两系统发电机端电压均为110V,试问带上负载后,图1-3(a),(b)中哪个能保持110V不变,哪个电压会低于110V?
为什么?
图1-3电压调节系统工作原理图
解带上负载后,开始由于负载的影响,图1-3(a)与(b)系统的端电压都要下降,但图(a)中所示系统能恢复到110V,而图(b)所示系统却不能。
理由如下:
图(a)系统,当低于给定电压时,其偏差电压经放大器放大后,驱动电机D转动,经减速器带动电刷,使发电机F的激磁电流增大,发电机的输出电压会升高,从而使偏差电压减小,直至偏差电压为零时,电机才停止转动。
因此,图(a)系统能保持110V不变。
图(b)系统,当低于给定电压时,其偏差电压经放大器后,直接使发电机激磁电流增大,提高发电机的端电压,使发电机G的端电压回升,偏差电压减小,但不可能等于零,因为当偏差电压为0时,=0,发电机就不能工作。
即图(b)所示系统的稳态电压会低于110V。
1-5图1-4是仓库大门自动控制系统原理示意图。
试说明系统自动控制大门开、闭的工作原理,并画出系统方框图。
图1-4仓库大门自动开闭控制系统
解:
当合上开门开关时,电桥会测量出开门位置与大门实际位置间对应的偏差电压,偏差电压经放大器放大后,驱动伺服电动机带动绞盘转动,将大门向上提起。
与此同时,和大门连在一起的电刷也向上移动,直到桥式测量电路达到平衡,电动机停止转动,大门达到开启位置。
反之,当合上关门开关时,电动机带动绞盘使大门关闭,从而可以实现大门远距离开闭自动控制。
系统方框图如图1-5所示。
1-6控制系统分为两种基本形式开环系统和闭环系统。
1-7负正反馈如何定义?
答:
将反馈环节取得的实际输出信号加以处理,并在输入信号中减去这样的反馈量,再将结果输入到控制器中去控制被控对象,我们称这样的反馈是负反馈;反之,若由输入量和反馈相加作为控制器的输入,则称为正反馈。
1-8若组成控制系统的元件都具有线性特性,则称为线性控制系统。
1-9控制系统中各部分的信号都是时间的连续函数,则称为连续控制系统。
1-10在控制系统各部分的信号中只要有一个信号是时间的离散信号,则称此系统为离散控制系统。
第二章
2-1试建立图2-1所示各系统的微分方程。
其中外力,位移和电压为输入量;位移和电压为输出量;(弹性系数),(阻尼系数),(电阻),(电容)和(质量)均为常数。
解:
(a)以平衡状态为基点,对质块进行受力分析(不再考虑重力影响),如图解2-1(a)所示。
根据牛顿定理可写出
整理得
(b)如图解2-1(b)所示,取A,B两点分别进行受力分析。
对A点有
(1)
对B点有
(2)
联立式
(1)、
(2)可得:
(c)应用复数阻抗概念可写出
(3)
(4)
联立式(3)、(4),可解得:
微分方程为:
(d)由图解2-1(d)可写出
(5)
(6)
(7)
联立式(5)、(6)、(7),消去中间变量和,可得:
微分方程为
2-2试证明图2-2中所示的力学系统(a)和电路系统(b)是相似系统(即有相同形式的数学模型)。
解
(a)取A、B两点分别进行受力分析,如图解2-2(a)所示。
对A点有
(1)
对B点有
(2)
对式
(1)、
(2)分别取拉氏变换,消去中间变量,整理后得
=
(b)由图可写出
=
整理得
=
比较两系统的传递函数,如果设则两系统的传递函数相同,所以两系统是相似的。
2-3假设某容器的液位高度与液体流入量满足方程,
式中为液位容器的横截面积,为常数。
若与在其工作点附近做微量变化,试导出关于的线性化方程。
解将在处展开为泰勒级数并取一次近似
(1)
代入原方程可得
(2)
在平衡工作点处系统满足
(3)
式
(2),(3)相减可得的线性化方程
2-4试求图2-3所示各信号的象函数。
解
(a)
=
(b)
=
(c)=
2-5求下列各拉氏变换式的原函数。
(1)
(2)
(3)
解
(1)
(2)原式=
x(t)=
(3)原式=
=
2-6已知在零初始条件下,系统的单位阶跃响应为,试求系统的传递函数和脉冲响应。
解单位阶跃输入时,有,依题意
2-7已知系统传递函数,且初始条件为,,试求系统在输入作用下的输出。
解系统的微分方程为
(1)
考虑初始条件,对式
(1)进行拉氏变换,得
(2)
2-8求图2-4所示各有源网络的传递函数。
解
(a)根据运算放大器“虚地”概念,可写出
(b)
(c)
2-9某位置随动系统原理框图如图2-5所示,已知电位器最大工作角度=3300,功率放大器放大系数为。
(1)分别求出电位器的传递函数,第一级和第二级放大器的放大系数,;
(2)画出系统的结构图;
(3)求系统的闭环传递函数。
解
(1)电位器的传递函数
根据运算放大器的特性,可分别写出两级放大器的放大系数为
,
(2)可画出系统结构如图解2-6所示:
(3)
2-10飞机俯仰角控制系统结构图如图2-7所示,试求闭环传递函数。
解经结构图等效变换可得闭环系统的传递函数
2-11已知系统方程组如下:
试绘制系统结构图,并求闭环传递函数。
解系统结构图如图解2-8所示。
利用结构图等效化简或梅逊增益公式可求出系统的闭环传递函数为
2-12试用结构图等效化简求图2-9所示各系统的传递函数。
解(a)
所以:
(b)
所以:
(c)
所以:
(d)
所以:
(e)
所以:
2-13已知控制系统结构图如图2-11所示,求输入时系统的输出。
解由图可得
又有
则
即
2-14试绘制图2-12所示系统的信号流图。
解
2-15试绘制图2-14所示信号流图对应的系统结构图。
解
2-16试用梅逊增益公式求2-12题中各结构图对应的闭环传递函数。
解(a)图中有1条前向通路,3个回路,有1对互不接触回路
(b)图中有2条前向通路,1个回路
(c)图中有1条前向通路,3个回路
(d)图中有2条前向通路,5个回路
(e)图中有2条前向通路,3个回路
2-17试用梅逊增益公式求图2-16中各系统的闭环传递函数。
解(a)图中有1条前向通路,4个回路
则有
(b)图中有2条前向通路,3个回路,有1对互不接触回路
则有
(c)图中有4条前向通路,5个回路
则有
(d)图中有2条前向通路,5个回路
则有
(e)图中有2条前向通路,3个回路,有1对互不接触回路
则有
2-18已知系统的结构图如图2-17所示,图中为输入信号,为干扰信号,试求传递函数,。
解(a)令,求。
图中有2条前向通路,3个回路,有1对互不接触回路。
则有
令,求。
有3条前向通路,回路不变。
则有
(b)令,求。
图中有1条前向通路,1个回路。
则有
令,求。
图中有1条前向通路,回路不变。
则有
令,求。
图中有1条前向通路,回路不变。
则有
(c)令,求。
图中有3条前向通路,2个回路。
则有
令,求。
有1条前向通路,回路不变。
则有
2-19如图2-18所示,已知单位负反馈系统开环传递函数
且初始条件为,。
试求:
(1)系统在作用下的输出响应;
(2)系统在作用下的静态误差
图2-18
解:
1)初始条件为0时,
现
代入,:
当,
则
2)
2-20系统如图2-19所示
图2-19
求:
(1)系统的微分方程
 升级会员
升级会员 