小车倒立摆模型建立及初步仿真Word文件下载.docx
《小车倒立摆模型建立及初步仿真Word文件下载.docx》由会员分享,可在线阅读,更多相关《小车倒立摆模型建立及初步仿真Word文件下载.docx(10页珍藏版)》请在冰豆网上搜索。
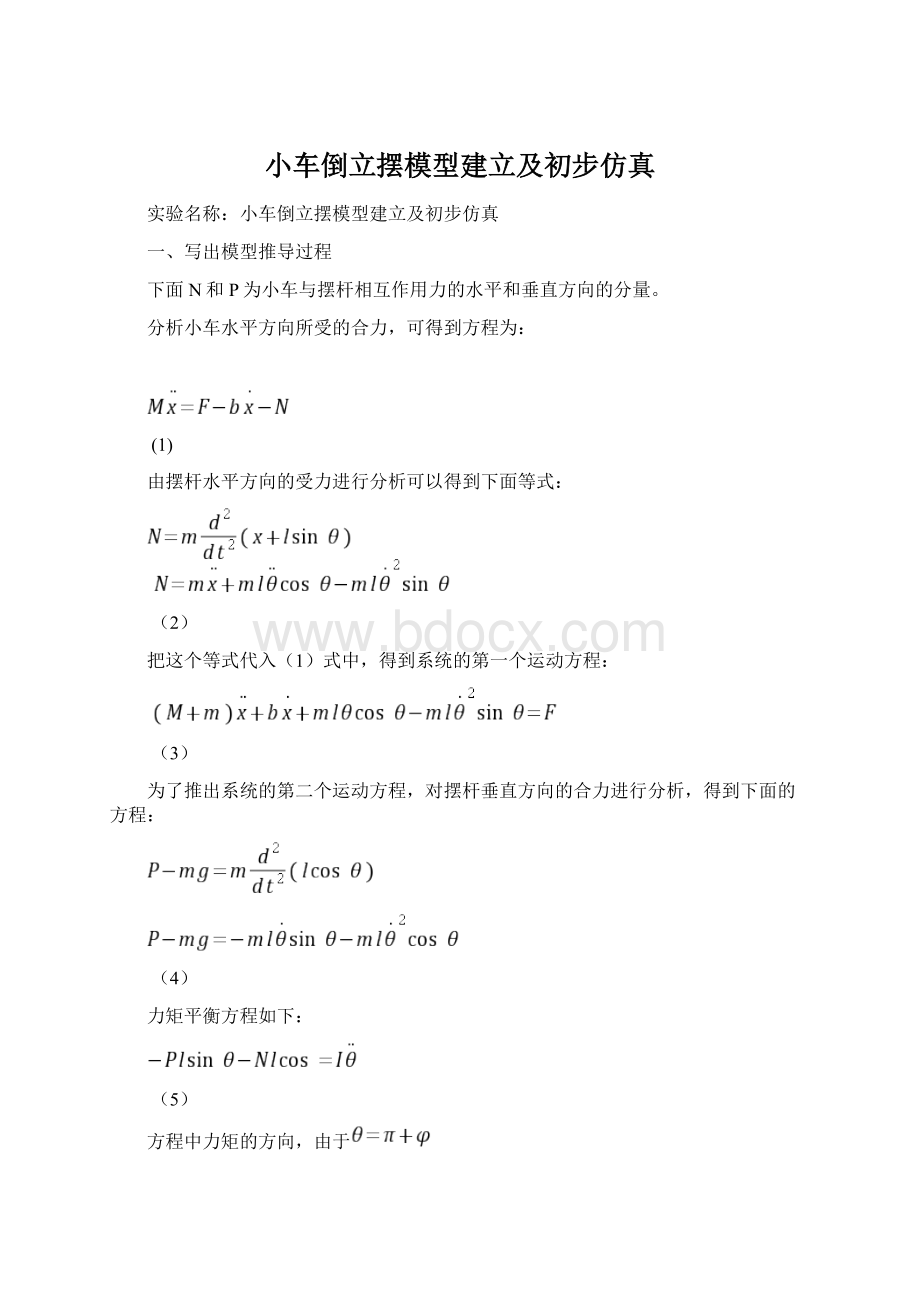
由摆杆水平方向的受力进行分析可以得到下面等式:
(2)
把这个等式代入
(1)式中,得到系统的第一个运动方程:
(3)
为了推出系统的第二个运动方程,对摆杆垂直方向的合力进行分析,得到下面的方程:
(4)
力矩平衡方程如下:
(5)
方程中力矩的方向,由于
,
,故等式前面有负号。
合并这两个方程,约去P和N,得到第二个运动方程:
(6)
假设
与1(单位是弧度)相比很小,即
,则可进行近似处理:
用
代表被控对象的输入力,线性化后两个运动方程如下:
(7)
对方程(7)进行拉普拉斯变换,得到:
(8)
(推到时假设初始条件为0)则,
摆杆角度和小车位移的传递函数为:
摆杆角度和小车加速度之间的传递函数为:
摆杆角度和小车所受外界作用力的传递函数:
进行开环响应的仿真:
M=0.5kgm=0.2kgb=0.1N/m/sl=0.3m
I=0.006kgm2T=0.005s(采样时间)
二、开环响应的MATLAB仿真程序
%reverse_pedulumn_TF.m
%倒立摆传递函数、开环极点及开环脉冲响应
%transfuction=num/den
M=0.5;
m=0.2;
b=0.1;
I=0.006;
g=9.8;
l=0.3;
q=(M+m)*(I+m*l^2)-(m*l)^2;
%calculatethepolytransfunction
num=[m*l/q00]
den=[1b*(I+m*l^2)/q-(M+m)*m*g*l/q-b*m*g*l/q0]
my_tf=tf(num,den)
%calculatethepolarsp
[r,p,k]=residue(num,den);
s=p
%thepulsereponseofthetransfunctionanddisplay
t=0:
0.005:
5;
impulse(num,den,t)
%step(num,den,t)
%displaythefield:
lateral0-1,longititudal0-60
axis([01060])
grid
%---------end----------
Matleb仿真图像
三、摆杆质量m=0.5kg、1kg时,MATLAB传递函数表示、开环极点及脉冲响应曲线图
1、m=0.5kg
2、m=1kg
 升级会员
升级会员 