机器人参考答案.doc
《机器人参考答案.doc》由会员分享,可在线阅读,更多相关《机器人参考答案.doc(7页珍藏版)》请在冰豆网上搜索。
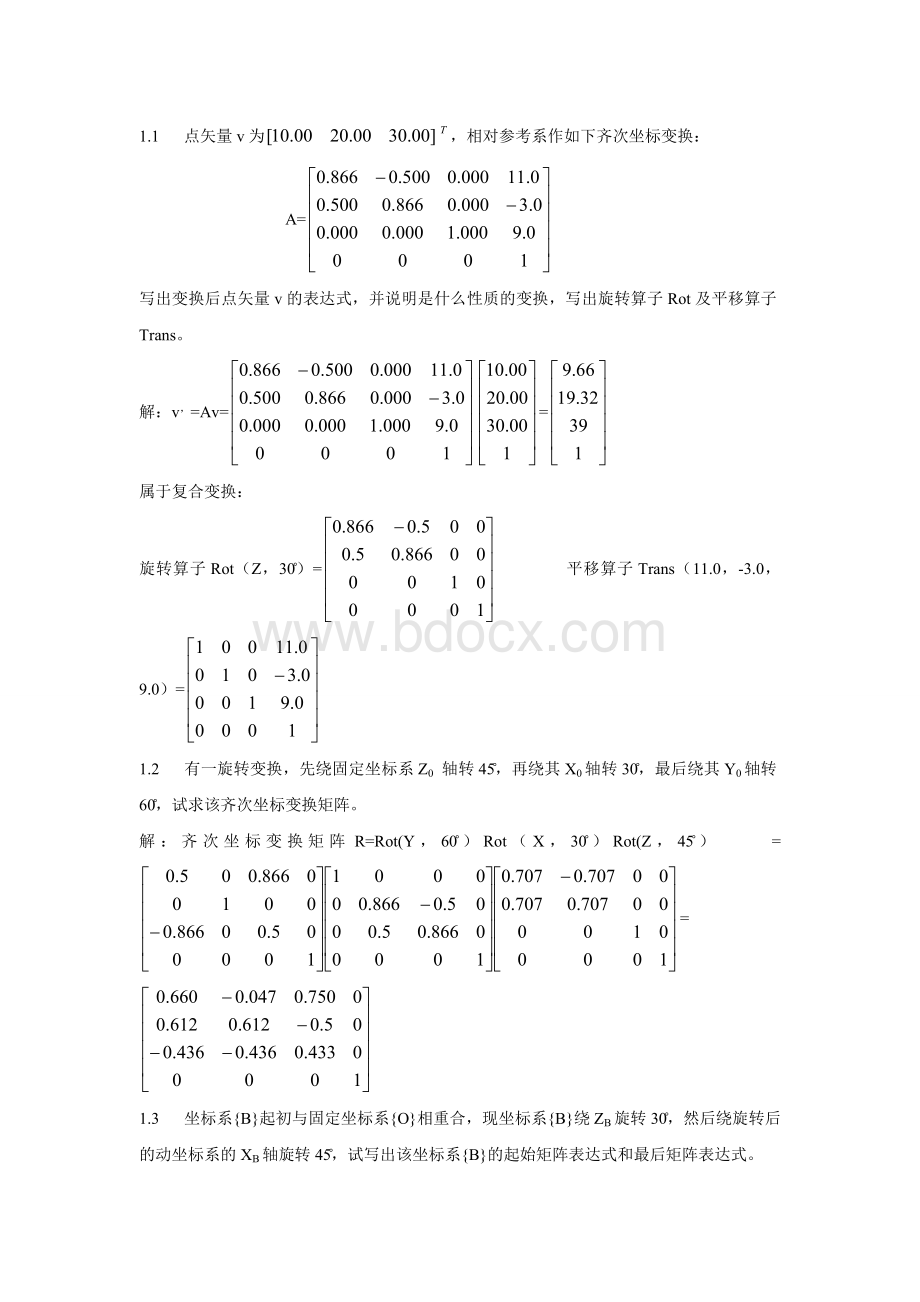
1.1点矢量v为,相对参考系作如下齐次坐标变换:
A=
写出变换后点矢量v的表达式,并说明是什么性质的变换,写出旋转算子Rot及平移算子Trans。
解:
v,=Av==
属于复合变换:
旋转算子Rot(Z,30̊)=平移算子Trans(11.0,-3.0,9.0)=
1.2有一旋转变换,先绕固定坐标系Z0轴转45̊,再绕其X0轴转30̊,最后绕其Y0轴转60̊,试求该齐次坐标变换矩阵。
解:
齐次坐标变换矩阵R=Rot(Y,60̊)Rot(X,30̊)Rot(Z,45̊)==
1.3坐标系{B}起初与固定坐标系{O}相重合,现坐标系{B}绕ZB旋转30̊,然后绕旋转后的动坐标系的XB轴旋转45̊,试写出该坐标系{B}的起始矩阵表达式和最后矩阵表达式。
解:
起始矩阵:
B=O=
最后矩阵:
B´=Rot(Z,30̊)BRot(X,45̊)=
1.4如题1.8图所示的二自由度平面机械手,关节1为转动关节,关节变量为θ1;关节2为移动关节,关节变量为d2。
试:
(1)建立关节坐标系,并写出该机械手的运动方程式。
(2)按下列关节变量参数求出手部中心的位置值。
θ1
0̊
30̊
60̊
90̊
d2/m
0.50
0.80
1.00
0.70
解:
建立如图所示的坐标系
参数和关节变量
连杆
θ
α
а
d
1
θ1
0
0
0
2
0
0
d2
0
机械手的运动方程式:
当θ1=0̊,d2=0.5时:
手部中心位置值
当θ1=30̊,d2=0.8时
手部中心位置值
当θ1=60̊,d2=1.0时
手部中心位置值
当θ1=90̊,d2=0.7时
手部中心位置值
 升级会员
升级会员 