变频器控制文档格式.docx
《变频器控制文档格式.docx》由会员分享,可在线阅读,更多相关《变频器控制文档格式.docx(6页珍藏版)》请在冰豆网上搜索。
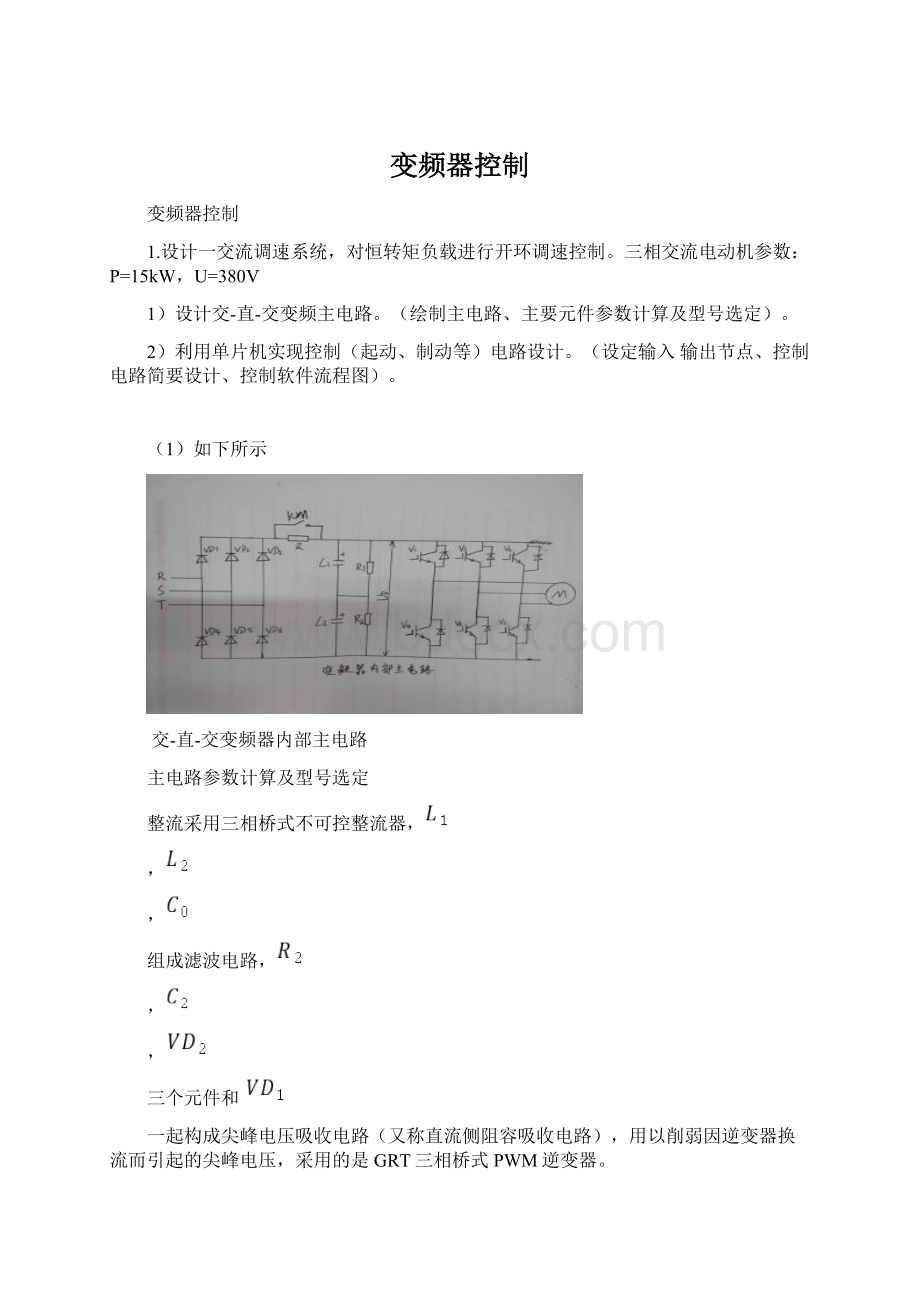
三个元件和
一起构成尖峰电压吸收电路(又称直流侧阻容吸收电路),用以削弱因逆变器换流而引起的尖峰电压,采用的是GRT三相桥式PWM逆变器。
(2)参数计算和元件选择
1)大功率开关管
SPWM正弦脉宽调制方法的直流利用率为0.866,即
。
为了使逆变器输出380V的线电压,要求直流侧的电源电压:
考虑到大功率的晶体管的管压降等,取
则大功率晶体管的参数为,U(BR)CBO=(2~3)Ud=900~1350V。
2)三相整流桥
整流桥输入侧电压为:
取电动机的效率为0.82,则电动机的输入功率为P1=15000/0.82≈18.3KW。
取逆变器的效率为0.93,则直流侧的功率为:
Pd=P1/0.93≈19.7KW,
故直流侧电流:
Id=Pd/Ud=19700/450≈43.8A。
整流二极管最高反压:
基于以上数据,选用MDS型三相整流桥模块,其最大输出电流为50A,最高耐压为1000V。
(3)LC滤波器取
,其最大耐压
选择两只2200uF,耐压在500V以上的电容器并联使用。
滤波电感在这里主要用来限制电流脉动(PWM变频调速系统不存在电流不连续问题)和短路电流上升率,按照晶体管三相桥式整流电路限制电流脉动的电感量算式估计如下。
(取
)
=mH≈18.61mH
考虑到电动机和整流变压器存在一定的电感量,取实际的串联电感为20mH。
选择两台电感量各为10mH,额定电流不小于43.8A的电抗器
串联。
(2)
驱动三相逆变桥
系统主程序框图:
2.英语翻译
Vectorcontrol,alsocalled
field-orientedcontrol
(FOC),isa
variable-frequencydrive
(VFD)controlmethodinwhichthe
stator
currentsofathree-phase
ACelectricmotor
areidentifiedastwoorthogonalcomponentsthatcanbevisualizedwithavector.Onecomponentdefinesthemagneticfluxofthemotor,theotherthetorque.Thecontrolsystemofthedrivecalculatesthecorrespondingcurrentcomponentreferencesfromthefluxandtorquereferencesgivenbythedrive'
sspeedcontrol.Typically
proportional-integral(PI)controllers
areusedtokeepthemeasuredcurrentcomponentsattheirreferencevalues.The
pulse-widthmodulation
ofthevariable-frequencydrivedefinesthe
transistor
switchingaccordingtothestatorvoltagereferencesthataretheoutputofthePIcurrentcontrollers.
FOCisusedtocontrol
AC
synchronous
and
inductionmotors.
Itwasoriginallydevelopedforhigh-performancemotorapplicationsthatarerequiredtooperatesmoothlyoverthefull
speed
range,generatefull
torque
atzerospeed,andhavehighdynamicperformanceincludingfast
acceleration
anddeceleration.However,itisbecomingincreasinglyattractiveforlowerperformanceapplicationsaswellduetoFOC'
smotorsize,costand
powerconsumption
reductionsuperiority.
Itisexpectedthatwithincreasingcomputationalpowerofthemicroprocessorsitwilleventuallynearlyuniversallydisplacesingle-variable
scalar
volts-per-Hertz
(V/f)control.
WhiletheanalysisofACdrivecontrolscanbetechnicallyquiteinvolved,suchanalysisinvariablystartswithmodelingofthedrive-motorcircuitinvolvedalongthelinesofaccompanying
signalflowgraph
andequations.
Invectorcontrol,anACinductionorsynchronousmotoriscontrolledunderalloperatingconditionslikeaseparately
excited
DCmotor.
Thatis,theACmotorbehaveslikeaDCmotorinwhichthe
fieldfluxlinkage
armature
fluxlinkagecreatedbytherespectivefieldandarmature(ortorquecomponent)currentsare
orthogonally
alignedsuchthat,whentorqueiscontrolled,thefieldfluxlinkageisnotaffected,henceenablingdynamictorqueresponse.
Vectorcontrolaccordinglygeneratesathree-phase
PWM
motorvoltageoutputderivedfromacomplex
voltagevectortocontrolacomplexcurrentvectorderivedfrommotor'
sthree-phasestatorcurrentinputthrough
projections
or
rotations
backandforthbetweenthethree-phasespeedandtimedependentsystemandthesevectors'
rotatingreference-frametwo-coordinatetimeinvariantsystem.
Suchcomplex
currentspacevectorcanbedefinedina(d,q)coordinatesystemwithorthogonalcomponentsalongd(direct)andq(quadrature)axessuchthatfieldfluxlinkagecomponentofcurrentisalignedalongthedaxisandtorquecomponentofcurrentisalignedalongtheqaxis.
Theinductionmotor'
s(d,q)coordinatesystemcanbesuperimposedtothemotor'
sinstantaneous(a,b,c)three-phase
sinusoidal
systemasshowninaccompanyingimage(phasesb&
cnotshownforclarity).Componentsofthe(d,q)systemcurrentvector,allowconventionalcontrolsuchasproportionalandintegral,or
PI,control,aswithaDCmotor.
While(d,q)coordinatesystemrotationcanarbitrarilybesettoanyspeed,therearethreepreferredspeedsorreferenceframes:
●Stationaryreferenceframewhere(d,q)coordinatesystemdoesnotrotate;
●Synchronouslyrotatingreferenceframewhere(d,q)coordinatesystemrotatesatsynchronousspeed;
●Rotorreferenceframewhere(d,q)coordinatesystemrotatesatrotorspeed.
Decoupled
torqueandfieldcurrentscanthusbederivedfromrawstatorcurrentinputsforcontrolalgorithmdevelopmen
WhereasmagneticfieldandtorquecomponentsinDCmotorscanbeoperatedrelativelysimplybyseparatelycontrollingtherespectivefieldandarmaturecurrents,economicalcontrolofACmotorsinvariablespeedapplicationhasrequireddevelopmentofmicroprocessor-basedcontrols
withallACdrivesnowusingpowerfulDSP(digitalsignalprocessing)technology.
Inverterscanbeimplementedaseither
open-loop
sensorlessorclosed-loopFOC,thekeylimitationofopen-loopoperationbeingmimimumspeedpossibleat100%torque,namely,about0.8
Hzcomparedtostandstillforclosed-loopoperation.
2.译文
矢量控制、矢量控制(FOC),也称为变频驱动器(VFD)控制方法中,定子电流的三相交流电动机被确定为两个正交组件,可以用一个向量。
一个组件定义了电动机的磁通,另一个扭矩。
驱动器的控制系统计算磁通和转矩的对应当前组件引用引用由驱动器的速度控制。
通常比例积分(PI)控制器是用来衡量现有的组件参考价值。
脉宽调制变频驱动定义了晶体管的开关根据定子电压引用π的输出电流控制器。
矢量控制是用来控制交流同步和感应电动机的控制。
它最初开发高性能电机中顺利运营所需的应用程序在全速范围内,生成完整的转矩为零速度和高动态性能包括快速加速和减速。
然而,它正变得越来越有吸引力较低性能的应用程序由于FOC的马达尺寸,减少成本和功耗优势。
预计,随着微处理器的计算能力将最终变量几乎普遍取代标量volts-per-Hertz(V
/
f)控制。
虽然交流传动控制的分析技术可以完全参与,这样的分析总是开始于建模驱动电动机的电路涉及附带的信号流图和方程。
在矢量控制交流感应或同步电动机控制在所有操作条件下像他励直流电机。
即交流电动机像一个直流电机的磁链和电枢磁链由各自的字段和电枢(或转矩分量)电流垂直对齐,当转矩控制,磁链不受影响,因此启用动态转矩响应。
矢量控制相应生成一个三相PWM电机电压输出来源于一个复杂的电压矢量控制一个复杂的电流矢量来源于电动机的三相定子电流输入通过预测或三相之间的来回旋转速度和与时间有关的系统和这些向量的旋转参考系二坐标时不变系统。
如此复杂的定子电流空间矢量可以定义在一个(d,q)坐标系统与正交组件沿d(直接)和q(正交)轴,这样场磁链分量的电流沿着d轴和转矩分量的电流沿着q轴对齐。
感应电动机的(d,q)坐标系统可以叠加到发动机的瞬时(a,b,c)三相正弦系统附带的图片所示(阶段b和c为清楚起见,未显示)。
组件(d,q)系统的电流矢量,使得传统控制比例和积分等,或者π,控制,直流电机。
虽然(d,q)坐标系旋转可以任意设置任何速度,有三个首选速度或参考帧:
静止的参考系(d,q)坐标系统不旋转;
同步旋转坐标系(d,q)坐标系旋转速度同步;
转子参考系(d,q)坐标系旋转转子速度。
解耦的转矩和磁场电流从而可以来源于原始定子电流输入控制算法开发。
而在直流电机磁场和转矩组件可以单独操作相对简单的控制各自的字段和电枢电流,经济控制交流电机的变速应用要求发展的基于微处理器的控制与所有交流驱动器现在使用强大的DSP(数字信号处理)技术。
逆变器可以实现为闭环或开环无传感器FOC,开环运行的关键限制可能至少要速度扭矩100%,即0.8赫兹而停滞为闭环操作。
 升级会员
升级会员 