基于ProE与ADAMS行星齿轮轮系的参数化设计和运动仿真精Word文档格式.docx
《基于ProE与ADAMS行星齿轮轮系的参数化设计和运动仿真精Word文档格式.docx》由会员分享,可在线阅读,更多相关《基于ProE与ADAMS行星齿轮轮系的参数化设计和运动仿真精Word文档格式.docx(9页珍藏版)》请在冰豆网上搜索。
和齿轮宽度等数据,就可以自动生成新的齿轮。
齿轮参数化
设计可以方便齿轮的修改,在优化设计中不必重新建模,而
省去大量时间。
1.1设置齿轮的参数
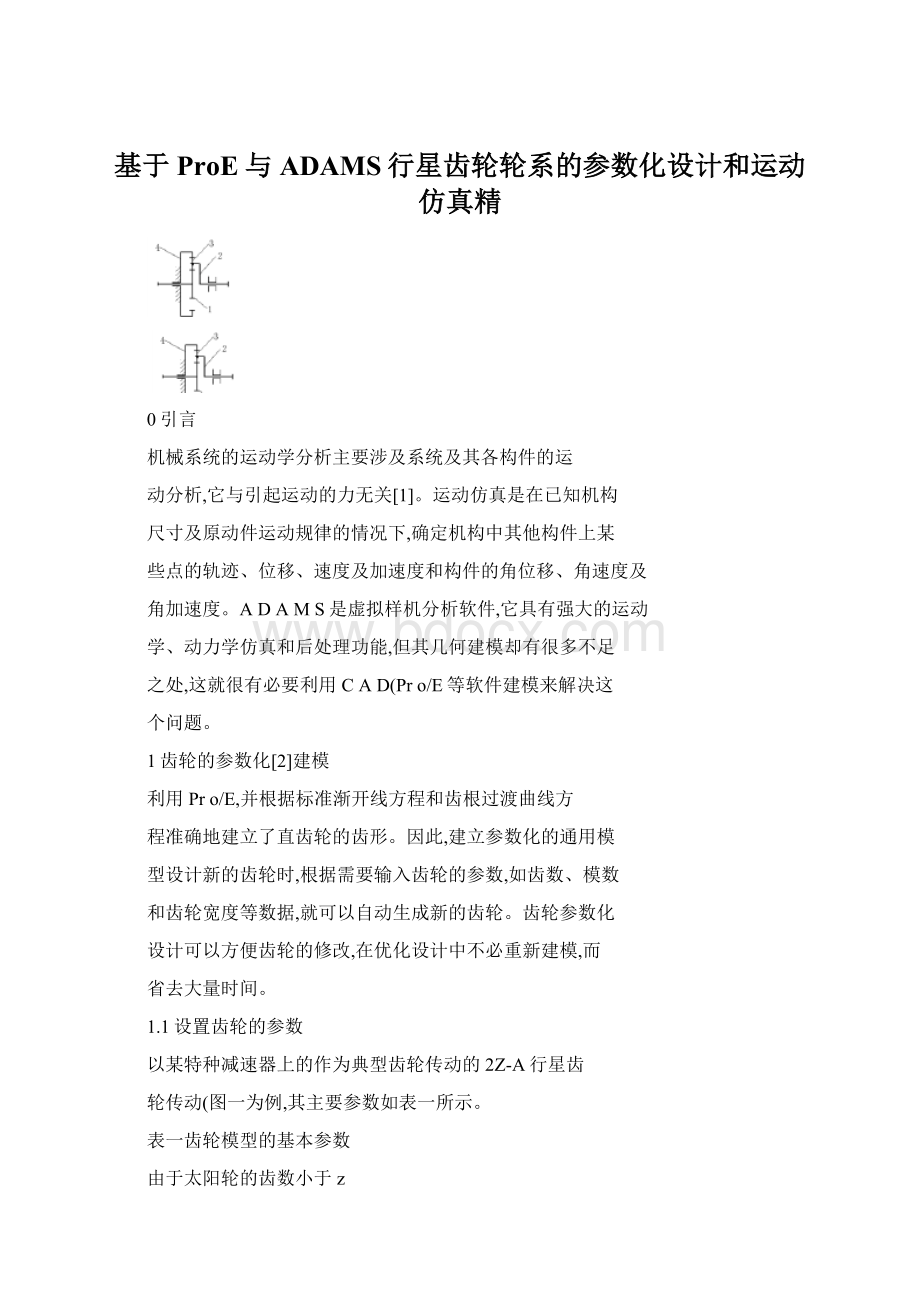
以某特种减速器上的作为典型齿轮传动的2Z-A行星齿
轮传动(图一为例,其主要参数如表一所示。
表一齿轮模型的基本参数
由于太阳轮的齿数小于z
min
=17,所以将太阳轮做出齿轮
轴。
在Pro/E工具菜单中选择参数选项,定义m(模数、z
(齿数、pa(压力角、width(齿宽、x(变位系数、h
a
*(齿顶高
系数、c*(顶隙系数。
在草绘中画四个圆并定义如下关系:
齿顶圆直径d
=(z+2ha*+2x*m;
齿根圆直径d
f
=(z-2ha*-2c*+2x*m;
分度圆直径d=m*z;
基圆直径d
b
=m*z*(cos(pa/(1+x/z。
1.2创建标准渐开线直齿圆柱齿轮轮廓线
渐开线的形成可以看作是当一条直线沿着一个圆的圆
周作纯滚动时,直线上任意一点的轨迹便是该圆的渐开线,
这个圆称为渐开线的基圆[2]。
齿轮渐开线的生成原理如图二
所示。
在Pro/E界面中单击“创建/插入基准曲线/从方
程”,然后坐标系选择“笛卡儿”,在打开的记事本中输入如下
渐开线方程式文件并保存。
r=db/2
theta=t*45
x=0
基于Pro/E与ADAMS行星齿轮轮系的参数化设计和运动仿真ParametricDesignandMotionSimulationofaPlanetaryGearTransmissionBasedonPro/EandADAMS
杨传营赵飞麒崔洪新
YangChuanyingZhaoFeiqiCuiHongxin
(贵州大学机械工程学院,贵州贵阳550003
(SchoolofMechanicalEngineering,GuizhouUniversity,GuizhouGuiyang550003
摘要:
利用Pro/E对齿轮进行参数化建模,将其装配模型导入到ADAMS中建立虚拟样机模型,继而对该模型进行运动
仿真,得到其转速特性曲线。
关键词:
Pro/E;
参数化建模;
ADAMS;
运动仿真
中图分类号:
TP391.9文献标识码:
A文章编号:
1671-4792-(20097-0115-03
Abstract:
UsingPro/Eforparameterizedmodelingofgears,establishADAMSvirtualprototypingmodelbytheassemblymodel
andautomaticmotionsimulation,reseachthecharacteristiccurvesofrotationalspeed.
Keywords:
ParameterizedModeling;
MotionSimulation
图一2Z-A行星齿轮传动原理图
1太阳轮2行星架3行星轮4齿圈
基
于
Pro/E
与
ADAMS
行
星
齿
轮
系
的
参
数
化
设
计
和
运
动
仿
真
115
科技广场2009.7
z=r*sin(theta-r*(theta*pi/180*cos(thetay=r*cos(theta+r*(theta*pi/180*sin(theta对于参数化设计的齿轮,只须在“参数”窗口中灵活地更改设计参数经“再生”即可。
齿圈为内啮合齿轮,其齿顶圆与齿根圆的计算公式与外啮合齿轮不同,应为齿顶圆直径da=(z+2ha*+2c*+2x*m,齿根圆直径df=(z-2ha*+2x*m。
在Pro/E中建好的行星轮齿圈太阳轮模型如图三,装配图如图四所示。
1.3装配模型的干涉检查
在Pro/E环境中利用菜单“分析/模型分析/体积干涉或全局干涉”对装配后的模型进行干涉分析检查,结果中会列出干涉的零件,干涉的位置在模型中加亮显示。
2约束副的创建
将三维模型导入ADAMS后(模型如图五,添加约束条件。
由于进行运动仿真时不考虑力的影响,啮合齿轮之间的约束通过齿轮副实现,可以得到准确的传动比和转速。
齿轮副关联两个运动副和一个方向坐标系(Marker,这两个运动副可以是旋转副、滑移副或圆柱副,通过它们的不同组合,就可以模拟直齿齿轮、斜齿齿轮、椎齿轮、行星齿轮、涡轮-蜗杆和齿轮-齿条等传动形式[3]。
行星齿轮系的运动特点是,齿圈和大地固定,行星轮本身自传和绕轴心公转,太阳轮绕轴心自转。
一般轮系齿轮副的公共机架设为大地,但行星轮系中的行星轮需要创建两个旋转副,一个绕轴心公转,一个绕本身质心自转。
而行星轮的质心相对于大地是运动的,所以不能选择大地作为行星轮和太阳轮以及行星轮和齿圈的齿轮副的公共机架,而选择行星架作为公共机架。
2.1太阳轮与行星轮之间的齿轮副创建
选择ADAMS/View约束库中的旋转副(Revolute图标,选择2Bod-1Loc和NomalToGrid。
第一Part选择行星轮,第二Part选择行星架,将Jiont1放在行星轮质心坐标点上;
第一Part选择太阳轮,第二Part选择行星架,将Jiont2放在太阳轮质心坐标点上;
在Jointname栏内点鼠标右键,在Pick栏内选取Jiont1、Jiont2,在CommonVeloncitymark栏内选取行星轮与太阳轮啮合点的坐标系(Maeker,创建了一个行星轮与太阳轮之间的齿轮副。
2.2齿圈与行星轮之间的齿轮副创建
选择ADAMS/View约束库中的旋转副(Revolute图标,
选择2Bod-1Loc和NomalToGrid。
第一Part
选择齿圈,
图二
齿轮渐开线的生成原理图
图三
行星轮轮系零件图
图四
行星轮轮系装配图
图五
模型导入ADAMS界面图
116
第二Part选择行星架,将Jiont3放在太阳轮质心坐标点上;
在Jointname栏内点鼠标右键,在Pick栏内选取Jiont1、
Jiont3,在CommonVeloncityMark栏内选取行星轮与齿圈啮
合点的坐标系(Maeker,创建了一个行星轮与齿圈之间的齿
轮副。
注意:
Maeker点要建立在行星架上,并且Maeker点的z
轴方向与齿轮副啮合点的运动方向一致。
3运动仿真
在行星架建立在大地上的旋转副上施加驱动,在驱动库
中选择旋转驱动图标,在Speed一栏中输入360,表示每秒
钟旋转360度。
点击仿真按钮,设置仿真终止时间为1s,仿真步长为10
步,然后点击开始仿真按钮,进行仿真。
由仿真结果可以测量
到太阳轮和行星轮的转速分别如图六、图七所示。
由图可知,太阳轮转速为ω
=272rad/s,行星轮转速为
ωb=-473.1rad/s,方向与行星架的转动方向相反。
2Z-A型行
星传动相对角速度的传动比为[4]:
式中:
p——
—内齿轮与中心轮的齿数比,称为2Z-A型行
星传动的特性参数(或称内传动比,一般可取p=2~8。
其中
两式相等,实际结果和理论数值相等,这说明该行星齿
轮传动机构的设计是正确的,且运动时各构件相对比较稳
定,装配达到了约束要求。
4结束语
通过本文的实例我们可以在ADAMS中对其进行动力
学仿真,并分析其仿真结果及数据,进行优化,有助于在短期
内得到更好的产品。
参考文献
[1]郑凯,胡仁喜,陈鹿民.ADAMS2005机械设计高级应
用实例[M].北京:
机械工业出版社,2006.
[2]钟日铭.Pro/ENGINEERWildfire3.0中文版机械设计
实例教程[M].北京:
清华大学出版社,2007.
[3]李增刚.ADAMS入门祥解与实例[M].北京:
国防工业
出版社,2008.
[4]饶振刚.行星齿轮传动设计[M].北京:
化学工业出版
社,2003.
作者简介
杨传营(1983—,男,贵州大学机械学院2007级硕士研究
生,机械制造及自动化专业,主要研究方向:
虚拟设计。
图六太阳轮的角速度曲线
图七行星轮的角速度曲线
117
 升级会员
升级会员 