基于STM32的智能巡线小车Word文档下载推荐.doc
《基于STM32的智能巡线小车Word文档下载推荐.doc》由会员分享,可在线阅读,更多相关《基于STM32的智能巡线小车Word文档下载推荐.doc(3页珍藏版)》请在冰豆网上搜索。
2.硬件设计
2.1主控芯片的选择
STM32是一款低功耗、高性能、集成度高、接口丰富的处理器,它采用ARMCortex系列处理器v7一M构架,与ARM7DMI相比运行速度最快可达35%。
本小车系统以STM32为主控芯片,利用红外收发对管采集跑道信息,充分利用STM32串口资源和高速的运算、处理能力来实现小车自动识别线路并按迹行进;
配置STM32通用定时器为PWM输出,通过调节PWM占空比实现调节电机的转速,根据传感器采集到的路径位置调整舵机转动的角度,从而实现精确巡线。
2.2电源电路设计
本系统采用2种供电方式。
由于STM32需要3.3V恒压供电,而现有的蓄电池随着用电时间会有所变化,势必会影响芯片的正常工作,因此本设计采用4.2V蓄电池和低压差稳压芯片HT7333,以达到3.3V恒压的目的;
后轮驱动采用12V、800r/rain的减速电机,供电电源采用12节1.2V充电电池,使电压达到14.4V,并采用L7812稳压芯片以实现对后轮电机的12V恒压供电。
前轮舵机的驱动电源也由L7812提供。
2.3检测电路设计
检测电路由发射电路、接收电路及比较电路组成。
智能车要按照跑道线行进就必须能检测到跑道信息,跑道采用颜色较深的黑色绝缘胶带。
考虑到成本选用,检测电路选用了STl68红外对管传感器。
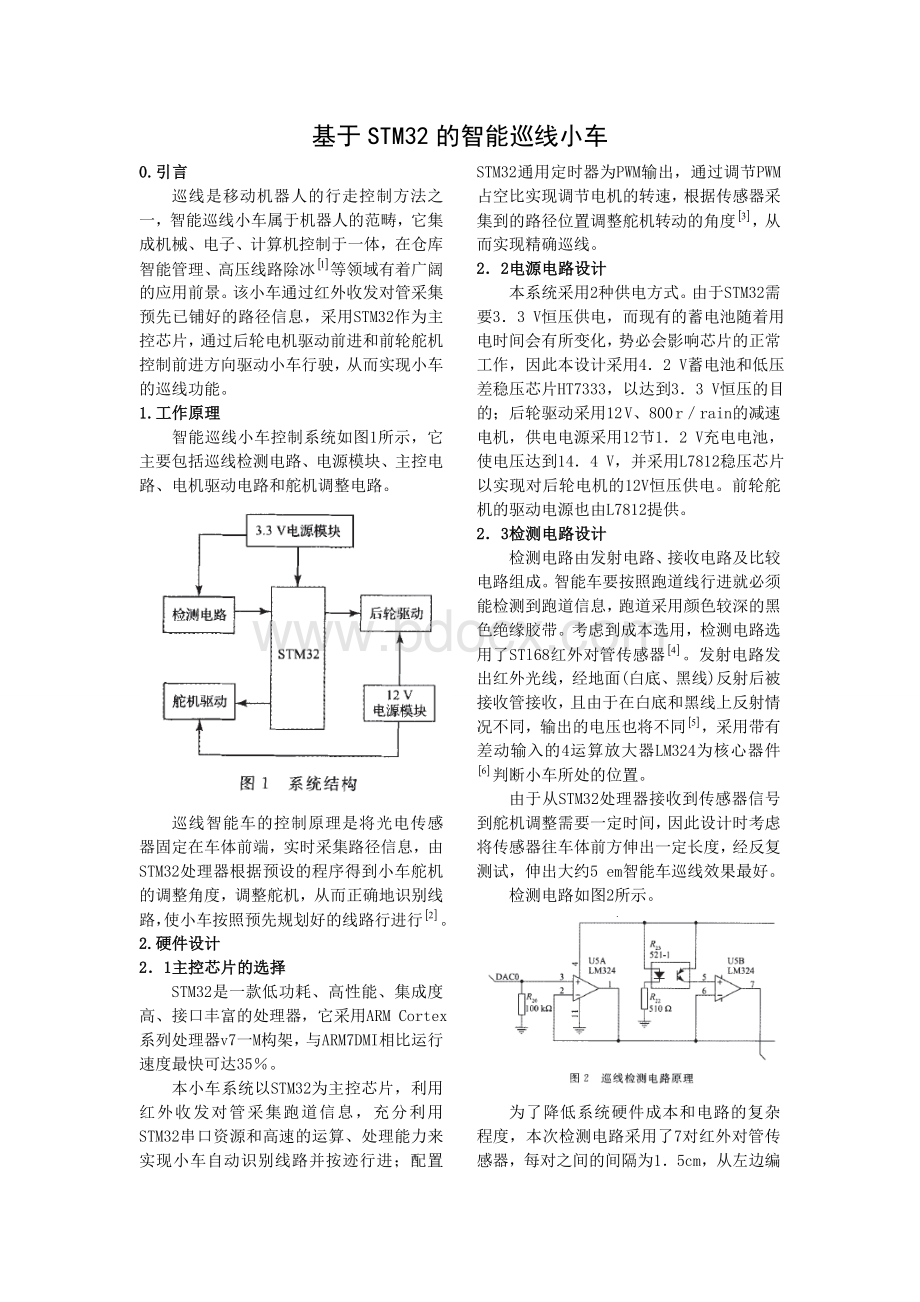
发射电路发出红外光线,经地面(白底、黑线)反射后被接收管接收,且由于在白底和黑线上反射情况不同,输出的电压也将不同,采用带有差动输入的4运算放大器LM324为核心器件判断小车所处的位置。
由于从STM32处理器接收到传感器信号到舵机调整需要一定时间,因此设计时考虑将传感器往车体前方伸出一定长度,经反复测试,伸出大约5em智能车巡线效果最好。
检测电路如图2所示。
为了降低系统硬件成本和电路的复杂程度,本次检测电路采用了7对红外对管传感器,每对之间的间隔为1.5cm,从左边编码为1,最右边为7,当其中一个或几个压到黑线时,由比较器获得小车所处位置,STM32控制舵机进行调整。
考虑到光线的反射受到传感器距离地面高度的影响,进行了多次试验,并得到表1数据。
经过综合考虑距离地面高度和反射强度等因素,最终确定传感器距离地面高度为0.6cm,经多次测试表明,此高度巡线效果最好。
2.4电机驱动电路
智能车行驶的动力来源于后轮的电机,它的性能直接影响到智能车的整体效果。
采用直流H桥驱动电路来控制电机的双向运动,该电路不仅可以为车体提供充足的动力,而且电路功耗低,能够保证车体持续稳定工作。
利用2对H桥电路驱动2个电机,通过调整三极管的导通状态使电机达到正反转的目的,并通过调整输入H桥电路的PWM来控制电机的转速。
2.5舵机驱动电路
舵机是一种角度伺服驱动器,由舵机的工作原理可以得知,给舵机输入一个周期在20ms左右,脉冲宽度在0.5ms至2.5ms的周期性脉冲信号,舵盘的位置相应发生变化。
也就是说给舵机一定频率的脉宽信号,其输出轴将保持一定的角度,直到提供另一个脉冲宽度才会发生改变。
本设计根据检测电路得到的车体位置,由主控芯片输出合适的PWM来控制舵机的调整角度。
定义从后往前看,左边第一个传感器为1号传感器,依次类推。
当1号传感器有效时,表示车体右偏,舵机需要向左调整。
相应地,5号到7号传感器有效时表示车体左偏,舵机需要向右调整。
此外,程序中还设定同时压中3个传感器时智能车停止。
通过实验测得在如表2结果时巡线效果最理想。
设定舵机PWM初值为0X0228(其中AK为PWM值的调整量,正数表示往左偏移,负数表示向右偏移)。
3.软件设计
系统的控制流程如图3所示。
软件控制程序主要是由ARM初始化、数据判断、电机驱动、舵机驱动组成的。
控制系统软件设计基于KeiluVision4环境,并使用C语言完成程序编写。
4.实验及测试结果
为了测试智能车的巡线效果,我们制作了一个测试场地。
该测试场地为400cm×
500cm的矩形区域,表面由白色KT板(由PS颗粒经发泡生成板芯,表面覆膜压合而成的材料,广泛应用于广告展示、建筑装饰和文化艺术等方面)覆盖,场地中央黑色防滑胶带(线宽为1.5~2.0cm,常规为1.7cm)粘贴上1个椭圆轨道。
通过对1~7号传感器压线时舵机角度的大小调整和软件中控制算法凹3进行优化,智能小车在测试场地的椭圆轨道上能够很好地巡线,从起跑线位置出发,小车按椭圆轨道巡线一周(周长约为10m),用时仅6S左右。
测试结果表明:
采用红外收发对管检测+舵机调整的控制方法不仅能够很好地使移动机器人沿规划的路径行进,而且速度非常快。
5.体会
随着汽车工业的迅速发展,关于汽车的研究也就越来越受人关注。
全国电子大赛和省内电子大赛几乎每次都有智能小车这方面的题目,全国各高校也都很重视该题目的研究。
可见其研究意义很大,我相信在未来一段时间内机器人的发展一定会迅速地改变人们的生活方式
参考文献
[1]曹文明,王耀南,印峰,等.高压输电线路除冰机器人障碍物识别方法研究[J].仪器仪表学报,2011,32(9):
2049.
[2]郑一维,李长俊,吴讯驰,等.基于STM32的电能质量检测技术研究[J].国外电子测量技术,2011,30(6):
73.
[3]ST.RM0090Referencemanual.STMicro-
Electronicsgroupofcompanies,2011.
[4]惠鸿忠,李健,成敬敏,等.基于单片机控制的智能巡线小车的研制[J].电工技术,2009,lO:
41.
[5]刘隆吉,李世光,高正中,等.移动机器人寻线控制系统设计[J].煤矿机械,2009,30(7):
125.
[6]王正勇,文国电.基于LM324的信号发生器设计与仿真[J].现代电子技术,2011(12):
120123
[7]朱益斌,胡学龙,朱亚锋,等.自主式寻迹机器人小车的设计[J].国外电子测量技术,2006,25(7):
[8]杨双龙,王刚,徐科军,等.基于线性电源的单/双频电磁流量计励磁控制系统[J].电子测量与仪器学报,2010,24(12):
148.
[9]雷贞勇,谢光骥.飞思卡尔智能车舵机和测速的控制设计与实现EJ].电子工程设计,2010:
91.
[10]李庆中,顾伟康,叶秀清.移动机器人路径跟踪的智能预瞄控制方法研究[J].机器人,2002(3):
156—159.
1140302219
孙磊
 升级会员
升级会员 