工业机器人毕业论文文献翻译中英文对照.docx
《工业机器人毕业论文文献翻译中英文对照.docx》由会员分享,可在线阅读,更多相关《工业机器人毕业论文文献翻译中英文对照.docx(13页珍藏版)》请在冰豆网上搜索。
ABSTRACT
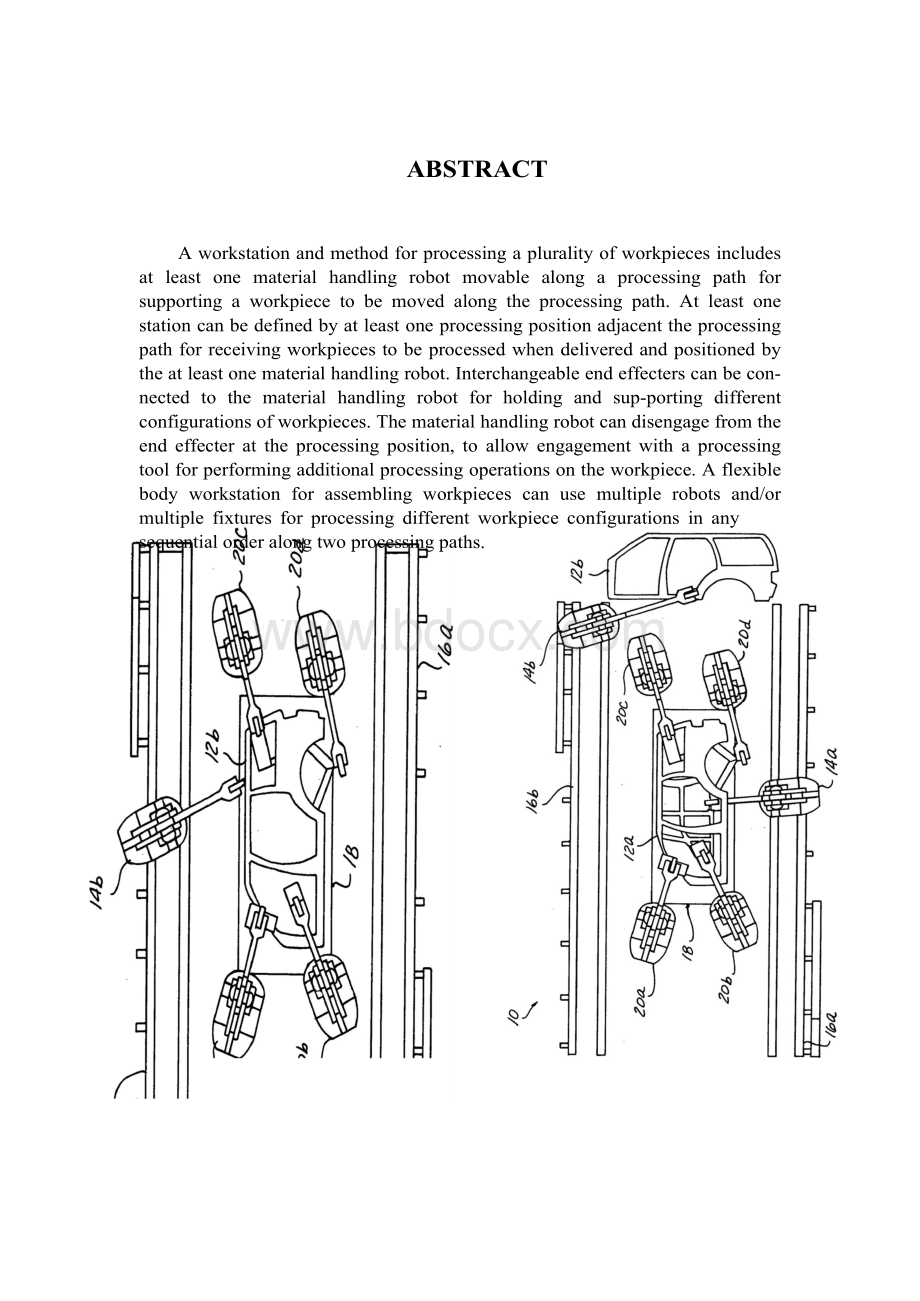
Aworkstationandmethodforprocessingapluralityofworkpiecesincludesatleastonematerialhandlingrobotmovablealongaprocessingpathforsupportingaworkpiecetobemovedalongtheprocessingpath.Atleastonestationcanbedefinedbyatleastoneprocessingpositionadjacenttheprocessingpathforreceivingworkpiecestobeprocessedwhendeliveredandpositionedbytheatleastonematerialhandlingrobot.Interchangeableendeffecterscanbecon-nectedtothematerialhandlingrobotforholdingandsup-portingdifferentconfigurationsofworkpieces.Thematerialhandlingrobotcandisengagefromtheendeffecterattheprocessingposition,toallowengagementwithaprocessingtoolforperformingadditionalprocessingoperationsontheworkpiece.Aflexiblebodyworkstationforassemblingworkpiecescanusemultiplerobotsand/ormultiplefixturesforprocessingdifferentworkpiececonfigurationsinany
sequentialorderalongtwoprocessingpa
ths.
RELATEDAPPLICATIONS
Thepresentapplicationclaimsthebenefitofpro-visionalapplicationSer.No.
60/548,129filedonFeb.26,2004andSer.No.60/618,422filedonOct.13,2004.
FIELDOFTHEINVENTION
Thepresentinventionrelatestoaflexiblebodyworkstationforassemblingworkpiecesusingmultiplerobotsandmultiplefixtures,andmorespecifically,thepresentinventionprovidesweldingworkstationsforauto-motiveassemblylineshavingmultipleindependentlywork-ingweldingrobotsandmultiplefixturesforholdingwork-pieces.
BACKGROUNDOFTHEINVENTION
Theefficiencyofaweldingworkstationcanbedefinedbytheamountoftime,normallyapercentage,thataweldingrobotspendsweldingcomparedtothetotaltimerequiredforaparticularrepetitivecycle.Theefficiencyoftheworkstationrelatestotheamountoftimethataweldingrobottakestoperformvariousweldingoperationscomparedtothetotalamountoftimethattheweldingrobotrequiresforaparticularrepetitivecycle.Idletimeforaweldingrobotcanoccurwhenanewworkpieceisloadedandpreparedinafixture.Iftheworkstationhasoneweldingrobotandonefixture,theweldingrobotwillstandidleasacompletedpartisunloadedfromthefixtureandanewworkpieceisloadedontothefixture.Inthepriorart,thisproblemwasaddressedbyaddingasecondfixtureattheworkstationwithinreachofasingleweldingrobot.Inaworkstationwithtwofixtures,theweldingrobotcancompleteweldingoperationsatonefixturewhileworkpiecesarebeingloadedandunloadedatthesecondfixture.Whentheweldingprocessiscompleteatthefirstfixture,theweldingrobotcanmovetothesecondfixtureandimmediatelycommencewelding.
Theamountoftimethataworkpieceispositionedinafixturewhileworkisbeingperformedcomparedtothetotalamountoftimethataworkpieceispositionedinafixturecorrespondstoworkpieceefficiency.Theamountoftimethataworkpiecesitsidleinafixturereducestheoveralloperatingcapacityoftheworkstationbyreducing
through-put,normallyreportedinpartsperhourorsimilarunitsfortheoverallassemblyprocess.Inaworkstationhavingonefixtureandoneweldingrobot,theamountoftimethataworkpiecesitsidleinthefixtureisminimizedbecausetheweldingrobotimmediatelycommencesweldingoperationsassoonasaworkpieceisloadedandanyothersetupproceduresarecompleted.However,inaworkstationthathastwofixturesandoneweldingrobot,aworkpieceisloadedontoonefixture,issetup,andthensitsidleuntiltheweldingrobotcompletesweldingoperationsatthesecondfixture.Therefore,inaworkstationhavingonefixtureandoneweldingrobot,theworkpieceefficiencyismaximizedwhileinaworkstationhavingtwofixturesandoneweldingrobottheweldingefficiencyismaximized.Itisdesirabletoprovideaworkstationwhereintheweldingefficiencyandtheworkpieceefficiencyarebothenhanced.
SUMMARYOFTHEINVENTION
Thepresentinventioncanincludeasingleorapluralityofsimilarworkstationspositionedinsequence
alonganassemblyline.Amovablematerialhandlingtransportationortransferrobotcanbelocatedinbetweenadjacentworkstationsformovingworkpiecesfromoneworkstationtothenext.Thepresentinventioncanalsoincludearobotforprocessingtheworkpieceswhileheldbythematerialhandlingtransferrobotinbetweentheadjacentworkstations.
Thepresentinventionincludesaflexiblebodyshopforassemblingworkpiecesusingasingleormultiplerobotsandasingleormultiplefixtures.Thepresentinventionincludesmovablematerialhandlingrobots,andstationarymaterialprocessingrobotsincombinationattheflexiblebodyworkstation.Theworkstationcanperformprocessingoperationsonmultipleworkpiecessequentially,andperformsdifferentprocessingoperationsthroughtheworkstationsimultaneously.The
 升级会员
升级会员 