控制工程基础实验Matlab仿真实验报告Word文件下载.docx
《控制工程基础实验Matlab仿真实验报告Word文件下载.docx》由会员分享,可在线阅读,更多相关《控制工程基础实验Matlab仿真实验报告Word文件下载.docx(21页珍藏版)》请在冰豆网上搜索。
直流电机的传递函数方框图如下:
直流电机传递函数方块图
所以传递函数可以写成:
n(s)1/Ce
Ua(S)FaS2TmST
式中,TmJ^,Ta=L分别为电动机的机电时间常数与电磁时间常数。
一般
CmCeR
相差不大。
而试验中的传递函数中,二者相差太大,以至于低频时:
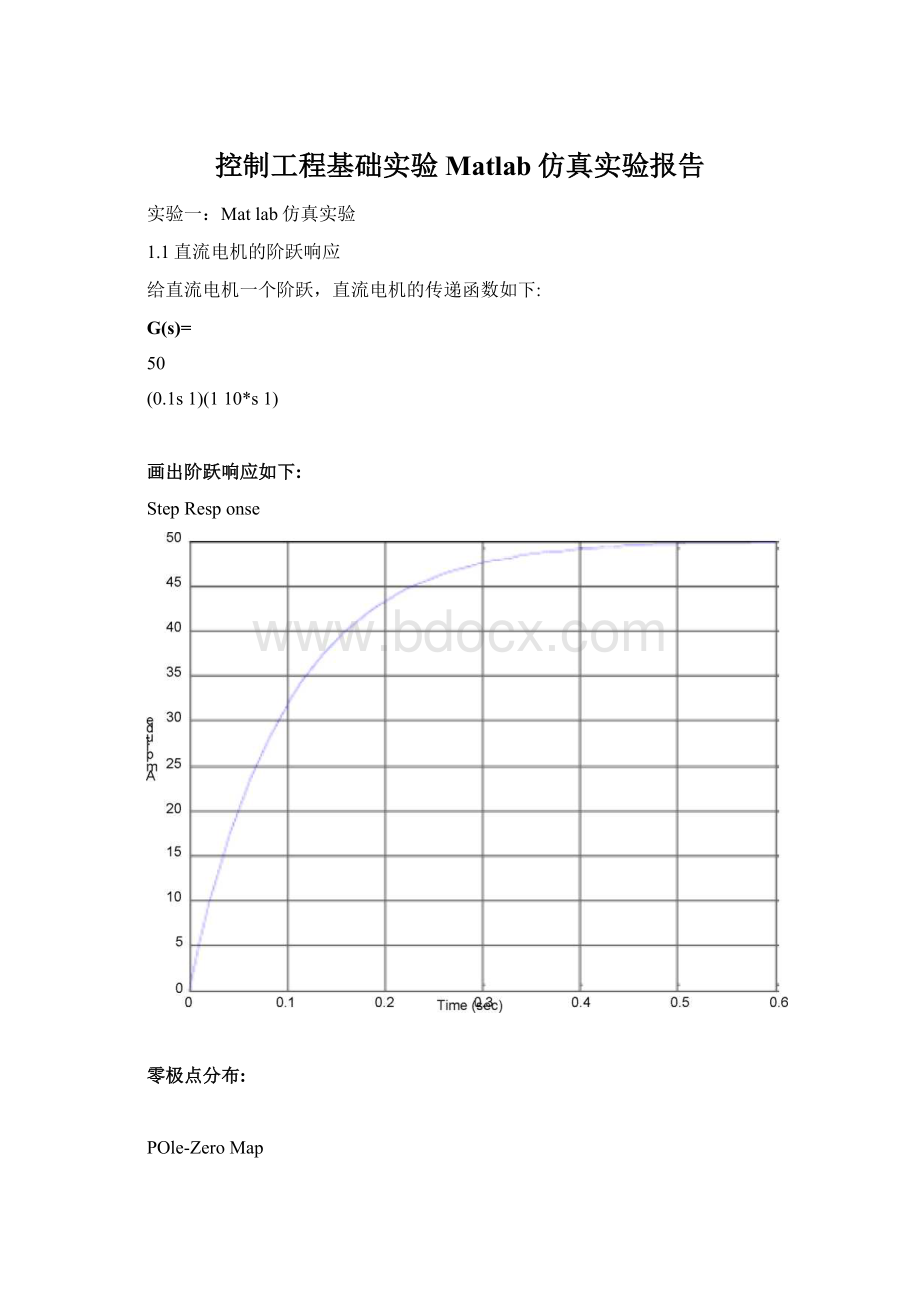
G(s)二
50
(0.1s1)(110,s1)
(低频时)
0.1s1
所以对阶跃的响应近似为:
x°
(t)=50(1-e处)
1.2直流电机的速度闭环控制
如图1-2,用测速发电机检测直流电机转速,用控制器Gc(s)控制加到电机电枢上的电压。
图1-2氏流电机速度闭环控
1.2.1
假设Gc(s)=100,用matlab画出控制系统开环Bode图,计算增益剪切频率、相位
裕量、相位剪切频率、增益裕量
BodeDiagram
相位裕量Pm=48.1370
幅值裕量对应的频率值(相位剪切)wcg=3.1797e+003
相位裕量对应的频率值(幅值剪切)wcp=784.3434
从理论上,若Gc(s)=100,那么开环传递函数为:
100
-4
(0.1s1)(0.001s1)(110s1)
1(0.1)2J(0.001)21(110A)2
111
.G(jH一[tan(0.1)tan(0.001■)tan(0.0001■)]
令G(j%)|=1,假设J1+(0.佃J托0.1灼,J+(1汉10鼻国)2屯1得:
c=786.15继而,.G(jc)二-[tand(0.1c)tan'
(0.001c)tan'
(0.0001c)]=48.061.2.2通过分析bode图,选择合适的Kp作为Gc(s),使得闭环超调量最小。
试验中,通过选择一组Kp=[20:
20:
200]数组,在Matlab中仿真,得出各自的
闭环阶跃响应如下:
通过对比分析,可知Kp=40时的超调量最小。
从理论上,分析Gc(s)=100时的开环传递函数的Bode图,可知:
此时的相位裕
量=48,较小,由:
1知,增大相位裕量,可以减小超调量
sin;
由于,开环的传递函数为:
G(s)p4知,减小Kp可
(0.1s+1)(0.001s+1)(1x10—s+1)
以增大相位裕量,但是Kp太小,会造成静态误差增大,并且快速性降低,这在
Kp=20,40的对比中,可以看出:
虽然Kp=20时,没有超调,会造成静态误差增大,并且快速性降低。
1.2.3:
计算此时的稳态位置误差系数,画出闭环的阶跃响应曲线,并与理论对比。
理论分析:
kp=40,G(s)H(s)=
40
(0.1s1)(0.001s1)(0.0001s1)
-limG(s)H(s)=40
s]0
于是系统对单位阶跃的稳态误差为:
"
卵孟1+6(爲(9如忒“22
1.22
得到的闭环阶跃响应曲线如下:
可知稳态误差为:
理论值与仿真值吻合的很好。
1.2.4:
令Gc(s)=Kp+KI/s,通过分析
(2)的Bode图,判断如何取合适的Kp和KI的值,使得闭环系统既具有高的剪切频率和合适的相位裕量,又具有尽可能高的稳态速度误差系数。
画出阶跃响应曲线。
开环的传递函数为:
G(s)H(s)
(Kps+K」
s(0.1s1)(0.001s1)(0.0001s1)
速度误差系数就大。
但是从另一方面,积分控制器的系数大,会对相位裕量不利,所以面临一个
Trade-off。
我将分两种情况讨论:
1以增大相位裕量为目标,兼顾剪切频率
F面不妨从原系统的开环Bode图入手,分析
(2)中的Bode图,用线段近似
如下:
中频段由“U型最优系统”来设计。
现已知「3=1000,由于:
M「2
h-1
知,中频宽h越大,闭环系统既具有的剪切频率化越小(快速性降低),但超调量降低,为了折中,不妨取h=10,则Mr=1.11,「c=550,此时求出•・2=100
于是,此时Kp=0.1,心=10
此时的阶跃响应曲线为:
2以提高剪切频率为目标,兼顾相位裕量
所以相比较而言。
方案②更优。
125:
考虑实际环节的饱和特性对响应曲线的影响:
在(4)的基础上,在控制器的输出端
加饱和环节,饱和值为土5,输入单位阶跃信号,看各点波形,阶跃响应曲线与(4)有何区别?
加了饱和特性前后的变化:
加了饱和控制后的阶跃响应:
steprespond
与原来的闭环阶跃响应曲线相比:
有了超调,并且快速性下降。
我们先通过对控制器前的偏差;
(s)采样,得到偏差的曲线如下:
■2
■8
eau^pmA
1
偏差曲线
0.2
0.05
0.1
0.150.2
time(sec)
0.250.30.35
6.
偏差的积分曲线:
偏差积分曲线
通过PI控制器后的数值采样:
11
\
V
通过PI控制器后的采样
10
9
8
7
6
5
4
3
2
100.05
0.25
0.30.35
由于在某段时间内超过了饱和环的上限,于是会受上限制约,所以经过饱和环后
的数值采样为:
经过饱和环后的数值采样
由于饱和环的控制,使得最初的偏差经过PI放大后(主要是比例放大),这种效果得到控制,使得反馈效果受到限制,从而导致超调,以及快速性下降。
1.3直流电机的位置闭环控制
直流电机位置闭环控制系统如图1-3,其中做了电流控制环。
T为电磁力矩,Td
为作用在电机轴上的阻力矩
131:
先调好速度环:
仅对图1-3中的速度环分析和仿真,速度控制器Gcco(s)取为形
式,确定其参数
如果速度控制器Kp=1,那么得到的开环伯德图如下:
Frequency(rad/sec)
得到以下几点:
①低频增益小,稳态误差较大
②剪切频率较低,频带短,上升时间慢,快速性差
3相位裕量充足,谐峰值小,超调量小。
所以,我们可以通过增大Kp,增大剪切频率,以及低频增益,并保证合适的相
位裕量
-
=,
,.
—-
•"
二
J
fJ
I~,
=-
*
■-
U
O0OOO
11
-kDacea^hngaM
局部放大图:
00
IDDOCeau-knaaM
00-90
T—
O
Lue^dTesanp
80
kp=1
kp=1O
kp=20
kp=50
kp=100
kp=200
kp=500kp=1000
1234
10101010
所以从图中可以看出Kp=100时,综合效果最好。
132:
设Td=1(t),仿真速度环在单位阶跃输入下的输出①,分析稳态误差。
加)
速度控制器
简化后的电流环
0.02
O.OOh+1
测速发电机
在单位阶跃下的输出曲线:
-10
0.045
00.0050.010.0150.020.0250.030.0350.04
30
ooo
21
eqJ-omA
20000
200
Td(s)
Gcr(s)s(0.0001s1)-
由于输出为:
(S):
1+s(0.001s1)(0.0001s1)
400
所以稳态值为49.5,而实际的稳态值为49.5所以,得到的实际的稳态误差为:
-0.5;
而理论计算如下:
G(s)H(s)一s(0.001s1)(0.0001s1)
由于系统的稳态误差包括以下两部分:
①系统对输入信号的稳态误差为:
静态速度误差系数为:
Kp=limG(s)H(s)=:
=^0
于是系统对输入(单位阶跃)的稳态误差为:
e$s二lims1
^0
H(s)1G(s)H(s)s1K
50-0。
P
②系统对干扰的误差:
Kp=l!
m0G(s)H(s)八
于是系统对干扰(单位阶跃)的稳态误差为:
1…s(0.001s+1)1200CL
巳$=
 升级会员
升级会员 