五台电动机顺序控制系统设计Word下载.docx
《五台电动机顺序控制系统设计Word下载.docx》由会员分享,可在线阅读,更多相关《五台电动机顺序控制系统设计Word下载.docx(17页珍藏版)》请在冰豆网上搜索。
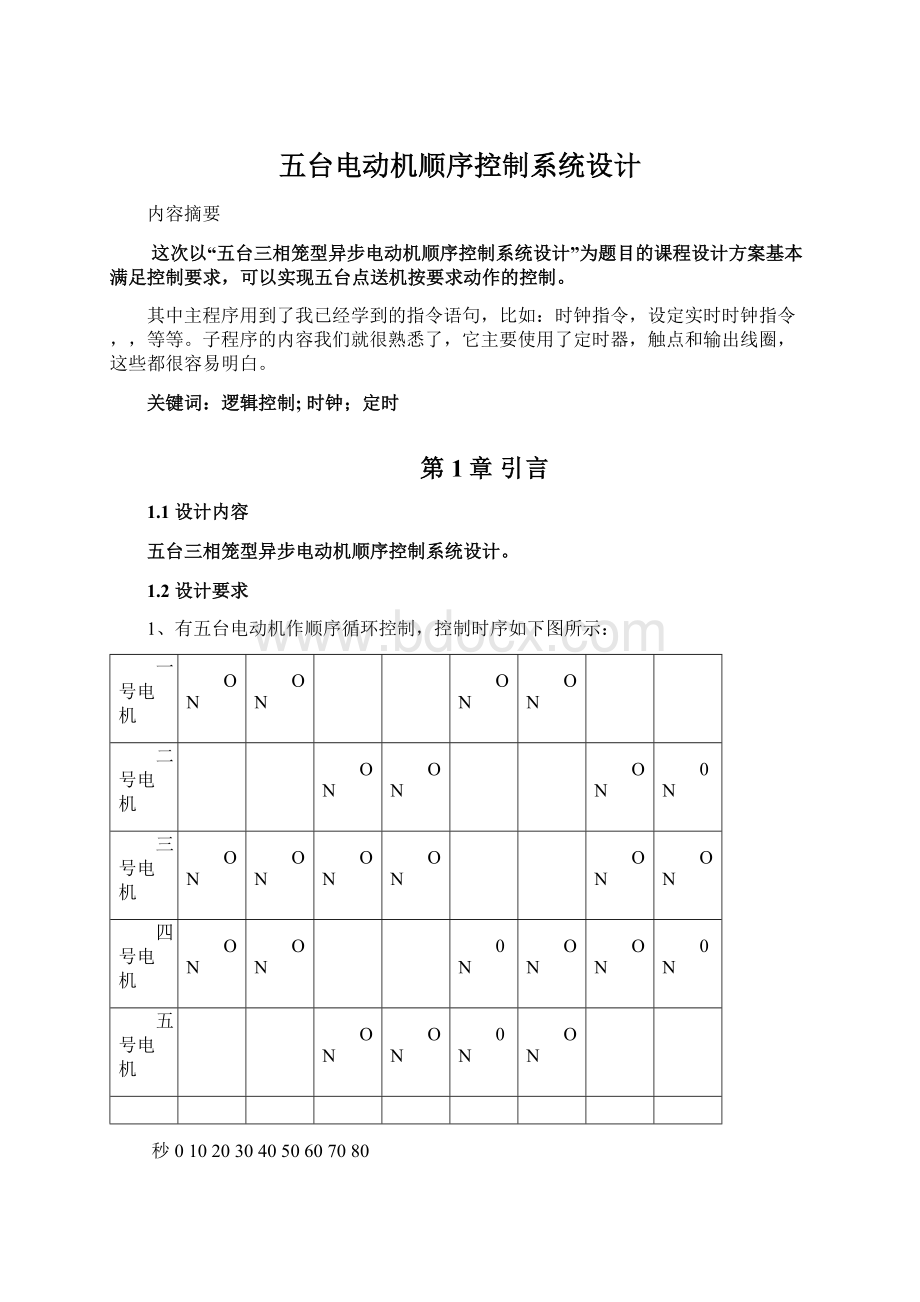
秒01020304050607080
图1.1
2、系统可以自动循环。
3、每台电动机可以单独启停控制。
1.3设计思路
根据控制要求,要实现五台电动机的循环控制,每台电动机还可以独自启动和停止。
通过反复思考之后,决定用多个时间继电器和中间继电器来控制五个交流接触器来协调动作,然后有每个交流接触器直接控制电动作满足要求的的动作,问题的关键在于如何设计合理的控制电路以保障时间继电器在合适的时间动作。
从上图可以看出,每隔20秒都会有电动机的启动和停止动作,可以在每个动作之初让时间继电器开始工作,控制与之相应的中间继电器工作,中间继电器让该停下的电动机断电,让该启动的电动机得电。
同时时间继电器的延时触点作为下一个动作的中间继电器的启动按钮,等到下一个动作开始时,与之相应的中间继电器先将上一中间继电器断电,然后启动相应的该工作的电机。
第2章系统总体方案分析与设计
2.1控制对象
本系统的控制对象有5台三相笼型异步电动机。
2.2控制要求
2.3方案分析
本系统是一个多台电动机的PLC控制系统,利用西门子公司的S7-200可编程逻辑控制器对电动机进行控制。
本系统具有一定的智能性,即它可以让五台电动机按要求自动循环运行。
2.4方案设计
根据控制要求,要实现五台电动机的循环控制,每台电动机还可以独自启动和停止。
用多个时间继电器和中间继电器来控制五个交流接触器来协调动作,然后有每个交流接触器直接控制电动作满足要求的的动作,问题的关键在于如何设计合理的控制电路以保障时间继电器在合适的时间动作。
系统的
继电接触器控制线路图如下:
图2.1继电器接触器主电路图
图2.2继电器接触器控制电路图
2.5元器清单
用到的元器主要有:
型号CPU224AC,12个按钮,2组熔断器,5个热继电器,4个中间继电器,5个交流接触器,4个时间继电器。
第3章PLC控制系统设计
3.1.1主电路设计
主电路主要采用比较指令判断时间的范围,近而调用子程序,从而实现控制要求。
3.1.2确定I/O点数量及PLC类型
分析PLC的输入和输出信号,在满足控制要求的前提下,要尽量减少占用PLC的I/O点。
由系统控制要求可见,由控制开关输入的启、停信号是输入信号。
由PLC的输出信号控制各电机的启动,停止。
选择PLC型号:
该系统需要12个输入新号,5个输出信号,选用CPU224AC,内部电源供电,继电器输出形式。
表3-1系统I/O分配表
输入/输出
设备/器件名称
I/O地址
符号名
输入信号
循环启动按钮
I0.0
SB6
全部停止按钮
I0.1
SB12
一号电机启动
I0.2
SB1
二号电机启动
I0.3
SB2
三号电机启动
I0.4
SB3
四号电机启动
I0.5
SB4
五号电机启动
I0.6
SB5
一号电机停止
I0.7
SB7
二号电机停止
I1.0
SB8
三号电机停止
I1.1
SB9
四号电机停止
I1.2
SB10
五号电机停止
I1.3
SB11
输出信号
一号电机驱动
Q0.1
KM1
二号电机驱动
Q0.2
KM2
三号电机驱动
Q0.3
KM3
四号电机驱动
Q0.4
KM4
五号电机驱动
Q0.5
KM5
根据I/O表及PLC的配置图很容易就可以得到PLC端子接线图3-2如下所示:
图3-2端子接线图
3.4.1梯形图(见附表)
3.4.2指令表(见附表)
结论
当按下相应按钮的时候,电动机能够完成控制要求要所指定的动作。
通过两周的课程设计,学到的很多东西,最主要的就是在学完了机电传动与控制这门课程之后,通过这次的课程设计让我将理论知识和实践做了一次完整的融合,短短的几天时间里收获了很多东西,感到十分充实!
虽然在老师的辛勤带领下,和同组同学的相互帮助下完成了自己的课程设计,但是由于是初次做plc方面的控制,难免会有一些缺陷,比如有好多的紧急情况的处理没有考虑到位,电动机动作的时间能否迅速响应等等。
致谢
在这短短几天的课程设计过程中,我首先要感谢敬爱的王老师,王老师严谨的工作态度让同学们万分钦佩,在您的详细认真的指导下,同学们才能顺利完成课程设计。
小小的一个课程设计让我深刻体会到了合作的重要性,要是没有同组同学的相互探讨,相互帮组就不可能有最后满意的结果。
梯型图:
指令表
TITLE=五台电动机顺序控制
Network1
//循环启动
LDI0.0
ANT32
OM0.1
OT35
ANI0.7
ANM0.5
ANT33
=M0.1
Network2
//M1的起停控制
LDM0.1
OM0.3
OQ0.1
OT33
OI0.2
ANT34
=Q0.1
Network3
//M2的起停控制
LDI0.3
OT34
OQ0.2
OT32
ANI1.0
=Q0.2
Network4
//M3的起停控制
OQ0.3
OI0.4
ANI1.1
=Q0.3
Network5
//M4的起停控制
OQ0.4
OI0.5
ANI1.2
=Q0.4
Network6
//M5的起停控制
LDT32
OQ0.5
ANI1.3
=Q0.5
Network7
//启动定时器1
TONT32,20000
Network8
//启动定时器2
LDM0.2
TONT33,2000
Network9
//启动定时器3
LDM0.3
ANT35
TONT34,2000
Network10
Network11
//启动定时器4
LDM0.4
TONT35,2000
Network12
OM0.2
=M0.2
Network13
LDT33
=M0.3
Network14
LDT34
OM0.4
=M0.4
Network15
//全部停止
LDI0.1
OM0.5
ANI0.0
=M0.5
参考文献
[1]程子华.PLC原理与实例分析.北京:
国防工业出版社,2006
[2]廖常初.PLC编程及应用.北京:
机械工业出版社,2005
[3]高钦和.可编程控制器应用技术及其设计实例.北京:
高等教育出版社,2004
[4]李缓.PLC原理与应用.北京:
北京邮电大学出版社,2005
[5]林明星.电气控制及可编程序控制器[M].北京:
机械工业出版社,2004
[6]周淑珍、高鸿斌.PLC分析与设计应用.北京:
电子工业出版社,2004
[7]王玉中.电气控制及PLC应用技术.河南:
河南科学技术出版社,2006[8]张新军.电气控制与PLC技术及应用.济源:
济源职业技术学院出版社,2006
 升级会员
升级会员 