第7节机械动力学Word文档格式.docx
《第7节机械动力学Word文档格式.docx》由会员分享,可在线阅读,更多相关《第7节机械动力学Word文档格式.docx(40页珍藏版)》请在冰豆网上搜索。
讨论:
① 总反力R21恒与相对速度V12成90°
+φ
②当β>
φ,PX>
F21,滑块作加速运动;
当β=φ,PX=F21,动则恒动,静则恒静;
当β<
φ,PX<
F21,原来运动,作减速运动,
原来静止,永远静止,称自锁。
③自锁条件:
β≤φ
β=φ,条件自锁(静止);
β<
φ,无条件自锁。
2.斜面摩擦
斜面机构如图,滑块置于升角α的斜面上,摩擦角为φ,作用于滑块上的铅垂力为Q,求滑块等速上升和下降时所需水平平衡力P和P’。
(1)求等速上升水平平衡力P
P-驱动力,Q-阻力
,,
(1)
(2)求等速下降水平平衡力P’
Q-驱动力,P’-阻力
,,
(2)
1欲求下滑(反行程)P’,只需将式
(1)中P→P’,φ→(-φ)
2下滑时,当α>
φ,P’为平衡力
α<
φ,P’为负,成为驱动力的一部分,该条件下,若无P’,则无论Q多大,滑块不下滑,称自锁,自锁条件:
α≤φ。
3.槽面摩擦
,,
令:
,,-当量摩擦系数
当量摩擦角
① 0<
θ<
90°
u0>
u,槽面摩擦>
平面摩擦,故槽面摩擦用于要增大摩擦的场合,如三角带传动、三角螺纹联接。
②槽面摩擦增大的原因是法向反力增大。
3引入u0是为简化计算,槽面摩擦的计算与平面摩擦的计算完全相同,仅用u0代替u。
(二)转动副中的摩擦
转动副:
径向轴颈-承受径向载荷
轴向轴颈(止推轴颈)-承受轴向载荷
1.径向轴颈的摩擦
F21=uN21,F21⊥N21
平衡时,ΣY=0,R21=Q
,故
设轴颈半径为r,摩擦力矩
,-当量摩擦系数
再令:
,-摩擦园半径
摩擦力矩:
①总反力R21与载荷Q大小相等、方向相反。
②总反力R21与摩擦园相切。
③总反力R21对轴颈中心O’1之矩为摩擦力矩Mf21。
④Mf21与ω12(轴颈相对轴承的角速度)方向相反。
⑤将M1与Q合成为一个力Q’,Q’的移距为h=M1/Q
当h>
ρ,Q’在摩擦园外,M1>
Mf21,加速运动;
当h=ρ,Q’切于摩擦园,M1=Mf21,匀速或静止;
当h<
ρ,Q’割于摩擦园,M1<
Mf21,减速或静止。
自锁条件:
h≤ρ
⑥的选取
线接触:
(有间隙、材料较硬)
面接触:
非跑合=π/2=1.57
跑合=1.27
故=(1-1.57)
2.轴向轴颈的摩擦
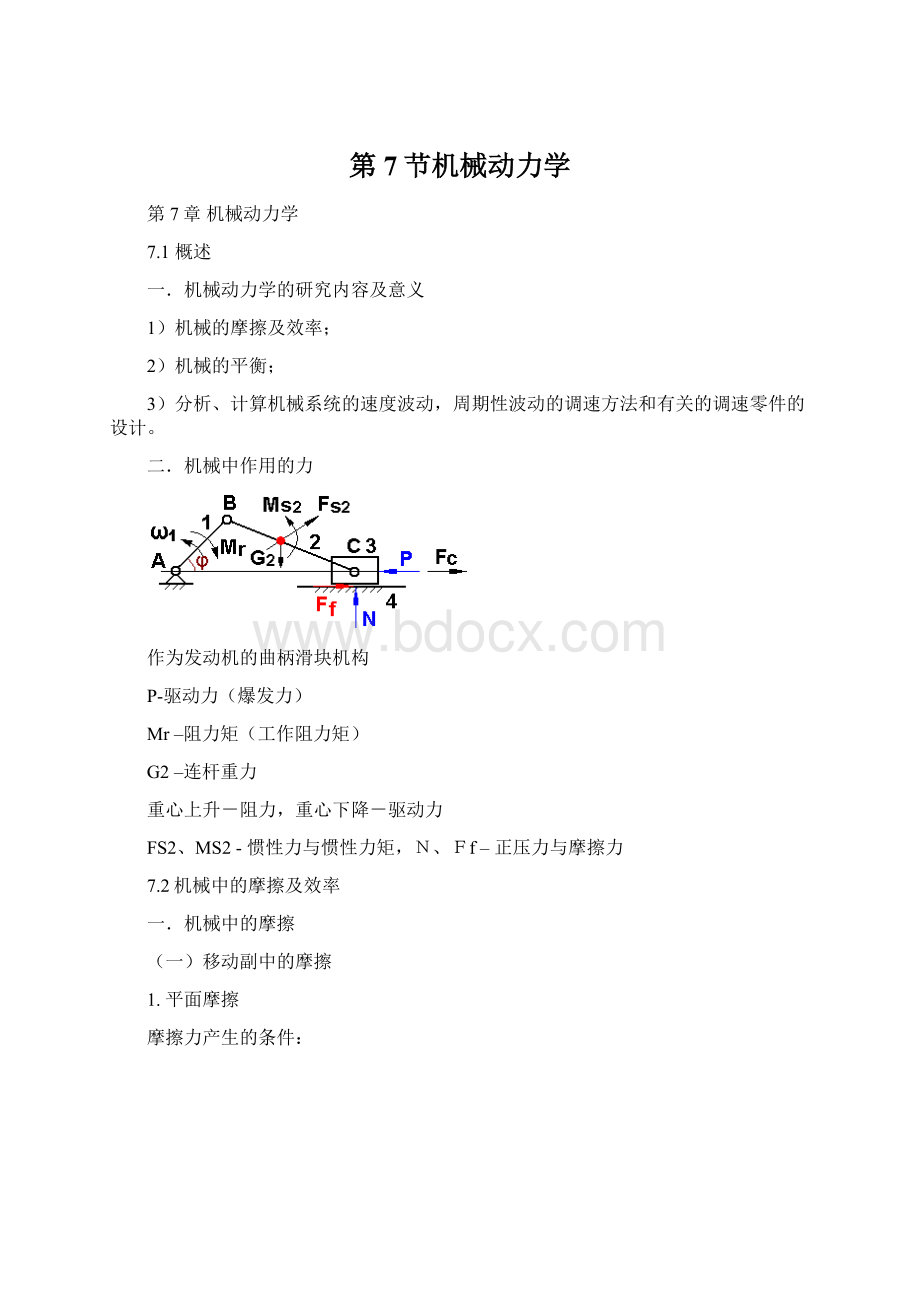
例图示曲柄滑块机构,P为驱动力,Mr、Q为阻力矩和阻力,图中小圆为摩擦圆,移动副摩擦角为φ,作机构力分析。
解
R12+R32=0R12+R32=0
R21+R41=0Q+R41+R21=0
Mr+R41*h=0P+R32+R43=0
P+R32+R43=0
例:
图示平底摆动从动件盘形凸轮机构,已知阻力Q,摩擦角为,小园为摩擦园,作机构力分析。
解:
三力平衡必汇交
二力平衡
驱动力矩=力偶矩
M1=R21×
h
图示机构,轴颈半径r,摩擦系数,阻力Q,进行机构力分析,作出力多边形,确定平衡力Pb。
二.机械效率和自锁
(一)机械效率的表达式
1.效率以功或功率的形式表达
功之比表示机构效率
输入功:
Ad输出功:
Ar(克服工作阻力功)
有害功:
Af(摩擦阻力功)Ad=Ar+Af
机械效率:
Af>
0,故
功率之比表示机构效率
2.效率以力或力矩的形式表达
作匀速运动的机械,机械效率可用力之比或力矩之比表示
P-驱动力,Q-工作阻力,Vp=r1ωP,VQ=r2ωQ
机械效率:
(*)
理想机械,无摩擦阻力等有害阻力,Nf=0,η0=1
设Po为对应与Q的理想驱动力
或Qo为对应与P的理想工作阻力,则:
理想机械:
有,代入式(*)
,也可用力矩比表达
图示压榨机。
Q为阻力,P为驱动力,λ为斜面升角,摩擦角为φ。
求:
1.P与Q的关系;
2.正行程机械效率;
3.不加P后被压物不松开时的λ值(反行程自锁)。
1.P与Q的关系
滑块3:
Q+R13+R23=0
滑块2:
P+R12+R32=0
因:
(*)
2.正行程机械效率
理想驱动力:
不自锁:
,
,即
3.反行程自锁条件
反行程时,Q为驱动力,利用式(*),以-代,有:
反行程效率:
令,有
反行程自锁条件为:
图示摩擦停止机构,已知Q、r0、r1及轴径半径rO1、rO2,1与2间摩擦角φ,回转副系数f。
求
1)楔紧角β
2)作机构力分析
解1)
构件2摩擦园半径ρ2=f×
rO2,δ=sin-1(LO2P/ρ2)
为保证能楔紧,应使及构成的力偶矩沿方向,有:
φ≥β+δ,即β≤φ-δ
解2)
取1,,作力多边形,求得、
螺旋副的受力分析、效率和自锁
受力分析、和自锁
螺旋副螺纹沿中径展开,可得一滑块沿斜面做匀速运动。
拧紧螺母,Ft-驱动力,FQ-阻力,滑块上升—正行程。
放松螺母,Ft-阻力,FQ-驱动力,滑块下降—反行程。
拧紧螺母—正行程
FQ-阻力(轴向力)
Ft-水平力,Ft=2T/d2,T-螺母拧紧力矩(克服FQ的转矩)
N-正压力,Ff-摩擦力,Ff=fN,f-摩擦系数
φ-摩擦角,φ=tg-1(Ff/N)=tg-1(f)
由力多变形:
tg(λ+φ)=Ft/FQ
有驱动力Ft=FQtg(λ+φ)
驱动力矩T=Ft(d2/2)=FQtg(λ+φ)d2/2
放松螺母—反行程
tg(λ-φ)=Ft/FQ
阻力F’t=FQtg(λ-φ)
阻力矩T’=FQtg(λ-φ)d2/2
(1)λ↑、F’t↑,λ↓、F’t↓,当λ<φ,F’t为负,与图示反向,成为驱动力的一部分。
若无F’t,则无论作用多大的FQ,滑块不下滑,即螺母不会自动松脱,称自锁。
自锁条件:
λ≤φ
λ<φ无条件自锁
λ=φ条件自锁
(2)欲求反行程的平衡力F’t,只需在求得的正行程计算式中
φ→-φ,Ft→F’t即可。
螺旋副的效率
效率计算式:
η=输出功/输入功
正行程:
拧紧螺母
W1=2πT=πFQtg(λ+φ)d2
输出功:
W2=FQS=FQπd2tgλ(S=πd2tgλ)
故螺旋副效率:
η=W2/W1=tgλ/tg(λ+φ)
反行程:
放松螺母
η’=W2/W1=tg(λ-φ)/tgλ,由η’≤0,可得自锁条件:
习题:
7-2、7-4、7-5
7.3机构的动态静力分析
由达朗贝尔原理,将构件运动时产生的惯性力作为已知外力加在相应的构件上,将动态受力系统转化为瞬时静力平衡系统,用静力学的方法对机构进行受力分析。
这种受力分析称为机构的动态静力分析。
不考虑构件惯性力、惯性力矩对机构受力的影响,这种受力分析称为机构的静力分析。
为什么要作机构的动态静力分析:
中、高速运动的机械其构件在运动时产生的惯性力往往很大,在对机构进行受力分析时,如果机构中的惯性力达到或超过驱动力或生产阻力的1/10就必须在分析中计入惯性力。
1.机构的动态静力分析的内容:
1)确定运动副中的约束反力;
2)确定在按给定的运动规律条件下需加在原动件上的平衡(力矩),以选择维持机器正常运转所需原动机的型号、功率。
构件惯性力的确定
S-构件质心,asi-质心加速度
εi-构件角加速度
Fsi-构件惯性力
,构件质量
Msi-构件惯性力矩
,构件绕质心转动惯量
将惯性力、惯性力矩加于机构构件,用静力分析方法求出各运动副反力和平衡力(力矩)。
2.杆组的静定条件
理论力学中,对所取每个隔离体(构件)可建立3个静力平衡方程,即:
ΣX=0,ΣY=0,ΣM=0
当未知量个数=平衡方程数,有唯一解。
当未知量个数>平衡方程数,只有通过变形连续条件,建立补充方程,方可获得唯一解,此为超静定问题。
机构静力分析中,如何取隔离体,使之满足
未知量个数=平衡方程数,讨论如下:
力的三要素:
大小、方向、作用点
回转副移动副高副
大小:
未知未知未知
方向:
未知已知(⊥导路)已知(公法线)
作用点:
已知(O点)未知已知(C点)
未知量:
221
设构件组由n个构件、PL个低副和Ph个高副组成
平衡方程数3n,低副未知量个数2PL,高副未知量个数Ph
有唯一解,3n=2PL+Ph
全低副机构:
3n=2PL(基本杆组)
结论:
作力分析取基本杆组即为静定杆组。
机构分析示例
插床主执行机构设计分析
插床结构
插床主执行机构
已知参数:
行程速比系数K=1.8,插刀行程H=200mm,
曲柄长:
LAB=60mm,ω=51/s,连杆长LDE=160mm
确定导杆长LCD,中心距LAC,导路距离Le
1.极位夹角
2.中心距LAC:
LAC=LAB/sin(0.5θ)=138.28mm
3.导杆长LCD:
LCD=0.5H/sin(0.5θ)=230.48mm
4.导路距离Le
机架长Le的确定,应使最大压力角最小
分析:
Le太大,Le>
LAC+LCD,出现在机构的极限位置
Le太小,Le<
LAC+LCDcos(0.5θ),出现在曲柄水平位置时的机构位置
使最小的Le为
最大压力角
5.机构运动分析(图解法)
6.机构动态静力分析
切削阻力:
Q=1000N,构件4质量:
m4
构件3质量:
m3,绕质心S3转动惯量JS3
拆组:
II级组原动件1、构件2-3、构件4-5
分析思路:
II级组4-5→II级组2-3→原动件1
计算构件惯性力、构件惯性力矩
构件3:
构件4:
、可利用力平移定理合成为一个力
II级组4-5力平衡方程
大小:
√√√?
?
方向:
√√√√√√
构件4对E点取矩,求得:
选力比例尺μP作构件组4-5力多边形,求得
II级组2-3力平衡方程
√√√?
√
构件3对C点取矩,求得:
作构件组2-3力多边形,求得
求作用在构件1的平衡力矩Md1
作用在构件1的瞬时功率
7.4机械的平衡
机械平衡的目的
消除或减小惯性力和惯性力矩对机械的不良影响。
不利影响:
机械振动、产生附加动反力,磨损加剧、联结松动等。
平衡
 升级会员
升级会员 