位置随动系统建模与时域特性分析---自控Word文件下载.doc
《位置随动系统建模与时域特性分析---自控Word文件下载.doc》由会员分享,可在线阅读,更多相关《位置随动系统建模与时域特性分析---自控Word文件下载.doc(16页珍藏版)》请在冰豆网上搜索。
时间安排:
1、课程设计任务书的布置,讲解(一天)
2、根据任务书的要求进行设计构思。
(一天)
3、熟悉MATLAB中的相关工具(一天)
4、系统设计与仿真分析。
(四天)
5、撰写说明书。
(两天)
6、课程设计答辩(一天)
指导教师签名:
年月日
系主任(或责任教师)签名:
年月日
摘要
自动控制理论是研究自动控制共同规律的技术科学。
它的发展初期,是以反馈理论为基础的自动调节原理,并主要用于工业控制。
控制理论在几十年的发展中,经历了从经典理论到现代理论再到智能控制理论的阶段,并有众多的分支和研究发展方向。
随动系统是指系统的输出以一定的精度和速度跟踪输入的自动控制系统,并且输入量是随机的,不可预知的。
位置随动系统是反馈控制系统,是闭环控制,调速系统的给定量是恒值,希望输出量能稳定,因此系统的抗干扰能力往往显得十分重要。
而位置随动系统中的位置指令是经常变化的,要求输出量准确跟随给定量的变化,输出响应的快速性、灵活性和准确性成了位置随动系统的主要特征。
简而言之,调速系统的动态指标以抗干扰性能为主,随动系统的动态指标以跟随性能为主。
本次课程设计是利用我们在《自动控制原理》中所学的知识,结合课外学习的知识,由一个具有特定要求的位置随动系统,建立系统模型,并计算分析其相关特性。
关键字:
位置随动系统反馈传递函数根轨迹
目录
1位置随动系统原理 1
1.1位置随动系统原理框图 1
1.2元件结构图分析 1
1.3位置随动系统各元件传递函数 3
1.4位置随动系统的结构框图 3
1.5位置随动系统的信号流图 4
1.6相关函数的计算 4
2根轨迹曲线 5
2.1参数根轨迹转换 5
2.2绘制根轨迹 5
3单位阶跃响应分析 6
3.1单位阶跃响应曲线 6
3.2单位阶跃响应的时域分析 7
4系统性能对比分析 9
4.1新系统性能指标计算 9
4.2系统性能指标对比分析 9
5总结体会 10
参考文献 11
位置随动系统建模与时域分析
1位置随动系统原理
1.1位置随动系统原理框图
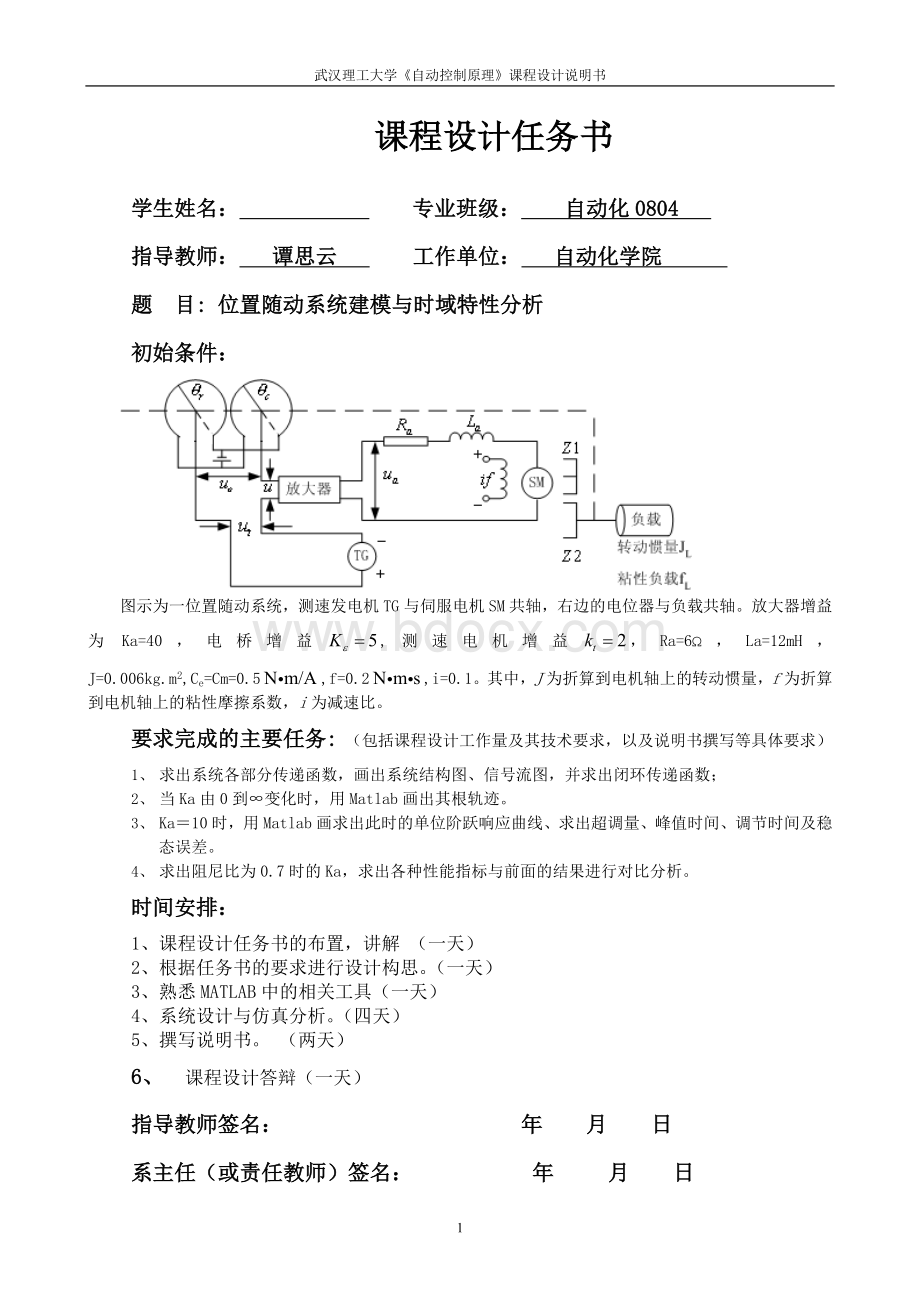
图1.1位置随动系统原理框图
工作原理:
用一对电位器作为位置检测元件,并形成比较电路。
两个电位器分别将系统的输入和输出位置信号转换成与位置比例的电压信号,并做出比较。
当发送电位器的转角和接受电位器的转角相等时,对应的电压亦相等,因而电动机处于静止状态。
假设是发送电位器的转角按逆时针方向增加一个角度,而接受电位器没有同时旋转这样一个角度,则两者之间将产生角度偏差,通过电桥产生一个偏差电压,与测速机反馈回电压比较后得到电压,然后经放大器放大到电压,供给直流电动机,使其带动负载和接受电位器的动笔一起旋转,直到两角度相等为止,即完成反馈。
1.2元件结构图分析
1.电桥:
电桥作为角位移传感器,在位置随动系统中是成对使用的。
作为常用的位置检测装置,它的作用是将角位移或者直线位移转换成模拟电压信号的幅值或相位。
指令轴相连的是发送机,与系统输出轴相连的是接收机。
该元件微分方程是:
;
在零初始条件下,其拉氏变换为;
结构框图如图1.2.1所示。
图1.2.1电桥
2.放大器:
放大器的作用将微弱的电流信号或者电压信号放大,该元件的微分方程是:
结构框图如图1.2.2所示。
图1.2.2放大器
3.直流电机:
直流电机是一个转动装置,在差压的作用下带动负载和接收电位器的动笔一起旋转,该元件的微分方程是:
(1)
结构框图如图1.2.3所示。
图1.2.3直流电机
4.测速电机:
使用测速机在整个系统中构成PD控制器,反映的变化趋势,产生有效的早期修正信号,改善了系统的稳定性,该元件的微分方程是:
(2)
结构框图如图1.2.4所示。
图1.2.4测速电机
5.减速器:
减速器将直流电机的速度降下来以加在接收电位器上,其中i为元件总减速比,该元件的微分方程式:
(3)
结构框图如图1.2.5所示。
图1.2.5减速器
1.3位置随动系统各元件传递函数
电桥(4)放大器(5)测速机(6)电机(7)(8)
1.4位置随动系统的结构框图
i
——
图1.4结构框图
1.5位置随动系统的信号流图
图1.5信号流图
1.6相关函数的计算
各元件传递函数消去中间变量,得到系统闭环传递函数如下:
(9)
开环传递函数如下:
(10)
其中是电动机机电时间常数;
是电动机传递系数(很小,忽略不计)。
代入常数计算可得,闭环传递函数:
(11)2根轨迹曲线
2.1参数根轨迹转换
根据参数根轨迹的的定义,将系统的开环传递函数
代入常数转化为:
2.2绘制根轨迹
用MATLAB绘制出开环传递函数的根轨迹代码如下:
num=[0.0364.82];
den=[0.02710];
rlocus(num,den);
title(‘根轨迹图’)
用MATLAB绘制出开环传递函数的根轨迹如图2.1所示。
图2.1根轨迹图3单位阶跃响应分析
3.1单位阶跃响应曲线
当代入式(9)中得到闭环传递函数
用MATLAB做出其阶跃响应曲线代码如下:
num=1785.19
den=[1,50.37,1785.19]
sys=tf(num,den)%系统表示法
t1=0:
0.005:
0.35
y1=step(num,den,t1)
plot(t1,y1)
grid
用MATLAB做出其阶跃响应曲线如图3.1所示。
图3.1单位阶跃响应曲线
3.2单位阶跃响应的时域分析
根据闭环传递函数算出此二阶系统的阻尼比,自然频率
欠阻尼情况下二阶系统的单位阶跃响应为:
(12)
式中,。
1.上升时间的计算
在式(12)中,令,求得
(13)
由于,所以有:
2.超调量的计算
因为超调量发生在峰值时间上,所以将峰值时间
得输出量的最大值
按照超调量的定义式,并考虑到,求得:
3.调节时间的计算
由教材可知,调节时间与闭环极点的实部数值成反比,选取,可以得到结论,在分析问题时常取:
4.稳态误差的计算
影响系统稳态误差的因素有:
系统的型别,开环增益,输入信号幅值和形式等,该系统开环增益,阶跃输入幅值,则系统稳态误差为:
4系统性能对比分析
4.1新系统性能指标计算
若未知,系统的闭环传递函数整理为:
(13)
由式(13)可以得到,
令,代入解得,得到此时系统的闭环传递函数为:
上升时间:
超调量:
调节时间:
(取误差带)
稳态误差:
4.2系统性能指标对比分析
通常,用评价系统的响应速度,用评价系统的阻尼程度,而是同时反映响应速度和阻尼程度的综合性指标。
阻尼比由0.6增大到0.7,系统的性能指标发生变化,表1为前后结果的对照:
表1系统性能指标对照表
开环增益
上升时间
超调量
调节时间
稳态误差
1785.19
0.065s
9.48%
0.138s
1015.67
0.033s
4.59%
0.157s
前后结果对比分析,得出以下结论:
上升时间变短,系统响应变快;
阻尼比变大,超调量变小;
稳态误差变大,说明系统抗扰动能力下降。
5总结体会
为期两周的《自动控制原理》课程设计就要结束了。
回想两周的课程设计,虽然有不少辛苦,然而在辛苦背后更多的还是欢乐与收获。
对于本次课程设计,我是本着检验自己的原则,在紧张与期待中开始的。
整个课程设计分为四个部分,随动系统建模、传递函数的求解、根轨迹绘制、系统性能比较。
每一部分的完成,都需要我们下一番功夫。
在随动系统的建模上,经过讨论、分析、仿真,找出了符合要求的随动系统模型
 升级会员
升级会员 