哈工大机械原理凸轮大作业Word格式文档下载.docx
《哈工大机械原理凸轮大作业Word格式文档下载.docx》由会员分享,可在线阅读,更多相关《哈工大机械原理凸轮大作业Word格式文档下载.docx(14页珍藏版)》请在冰豆网上搜索。
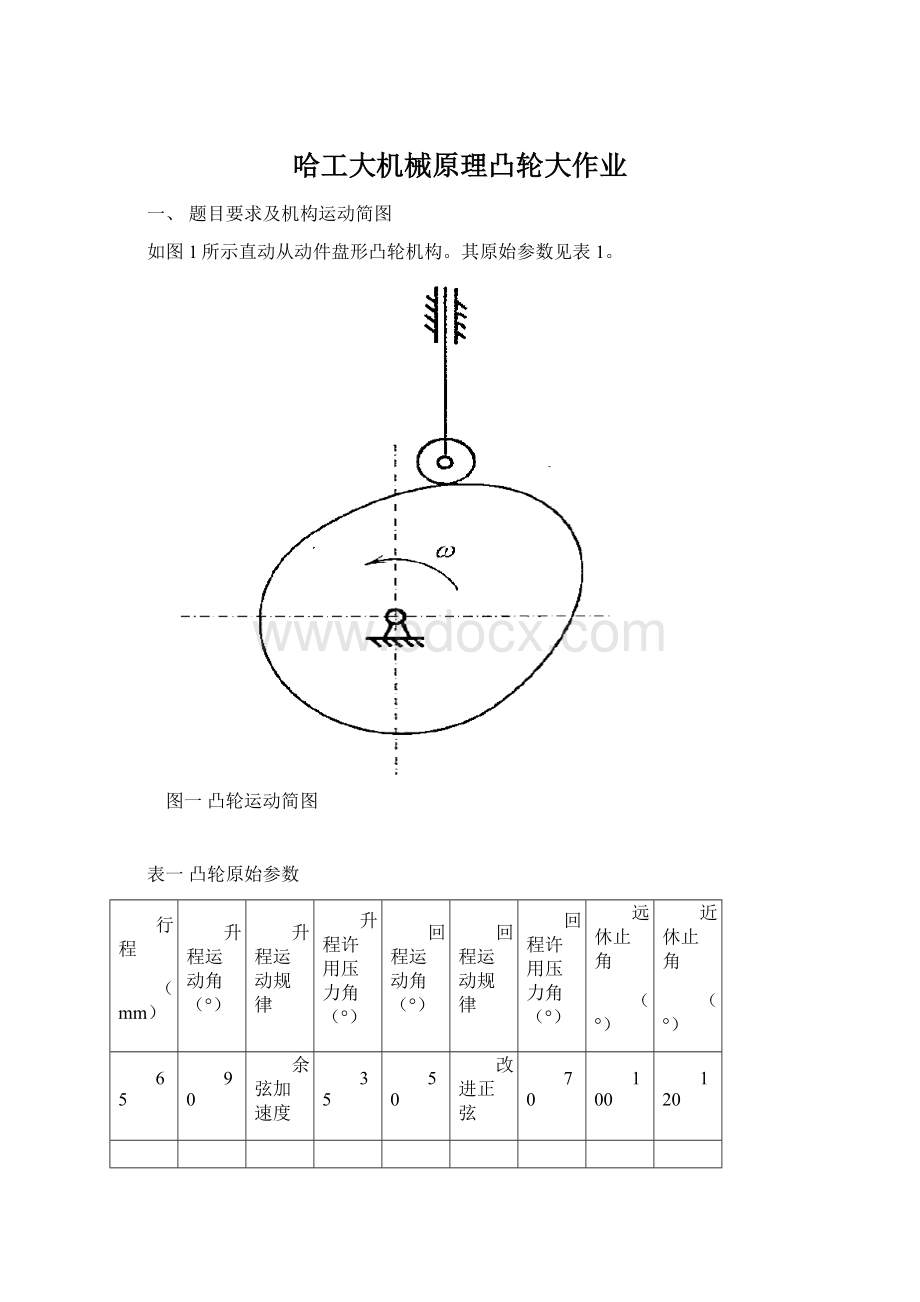
35
50
改进正弦
70
100
120
二、计算流程框图
三、建立数学模型
1.从动件运动规律方程
首先,由于设计凸轮轮廓与凸轮角速度无关,所以不妨设凸轮运动角速度为w=1rad/s。
(1)推程运动规律(0<
φ<
90°
s=
v=
a=
式中:
h=65mm,Φ0=π/2
(2)远休程运动规律(90°
<
190°
s=65mm
v=0
a=0
(3)回程运动规律(190°
240°
(190°
196.25°
(196.25°
233.75°
(233.75°
回程运动中的速度和加速度为位移对时间t的倒数:
(4)近休程运动规律(240°
360°
s=0
2.从动件位移、速度、加速度线图
(1)位移线图
(2)速度线图
(3)加速度线图
(4)位移、速度、加速度线图MATLAB源程序
%%已知条件
h=65;
%mm
phi_0=90./180*pi;
%rad
alpha_up_al=35./180*pi;
%升程许用压力角
phi_00=50./180*pi;
alpha_down_al=70./180*pi;
%回程许用压力角
phi_s=100./180*pi;
phi_ss=120./180*pi;
w=1;
%%绘制从动件位移、速度、加速度线图
%推程阶段
t_up=0:
0.5:
90;
t_up1=t_up./180*pi;
symst_up1phi_ups_upv_upa_up
phi_up=w.*t_up1;
s_up=h./2.*(1-cos(pi.*phi_up./phi_0));
v_up=diff(s_up,t_up1);
a_up=diff(v_up,t_up1);
s_up1=double(subs(s_up,t_up./180*pi));
v_up1=double(subs(v_up,t_up./180*pi));
a_up1=double(subs(a_up,t_up./180*pi));
%远休程
t_s=90:
(90+100);
t_s1=t_up./180*pi;
s_s(1:
201)=h;
v_s(1:
201)=0;
a_s(1:
%回程阶段1
t_down1=(90+100):
(90+100+50/8);
t_down11=t_down1./180*pi;
symst_down11phi_down1s_down1v_down1a_down1
phi_down1=w.*t_down11;
s_down1=h-h./(4+pi).*(pi.*(phi_down1-phi_0-phi_s)./phi_00-...
sin(4.*pi.*(phi_down1-phi_0-phi_s)./phi_00)./4);
v_down1=diff(s_down1,t_down11);
a_down1=diff(v_down1,t_down11);
s_down11=double(subs(s_down1,t_down1./180*pi));
v_down11=double(subs(v_down1,t_down1./180*pi));
a_down11=double(subs(a_down1,t_down1./180*pi));
%回程阶段2
t_down2=(90+100+50/8):
(90+100+7*50/8);
t_down22=t_down2./180*pi;
symst_down22phi_down2s_down2v_down2a_down2
phi_down2=w.*t_down22;
s_down2=h-h./(4+pi).*(2+pi.*(phi_down2-phi_0-phi_s)./phi_00-9.*sin(pi./3+4.*pi.*(phi_down2-phi_0-phi_s)./(3.*phi_00))./4);
v_down2=diff(s_down2,t_down22);
a_down2=diff(v_down2,t_down22);
s_down22=double(subs(s_down2,t_down2./180*pi));
v_down22=double(subs(v_down2,t_down2./180*pi));
a_down22=double(subs(a_down2,t_down2./180*pi));
%回程阶段3
t_down3=(90+100+7*50/8):
(90+100+50);
t_down33=t_down3./180*pi;
symst_down33phi_down3s_down3v_down3a_down3
phi_down3=w.*t_down33;
s_down3=h-h./(4+pi).*(4+pi.*(phi_down3-phi_0-phi_s)./phi_00-…
sin(4.*pi.*(phi_down3-phi_0-phi_s)./phi_00)./4);
v_down3=diff(s_down3,t_down33);
a_down3=diff(v_down3,t_down33);
s_down33=double(subs(s_down3,t_down3./180*pi));
v_down33=double(subs(v_down3,t_down3./180*pi));
a_down33=double(subs(a_down3,t_down3./180*pi));
%近休程
t_ss=(90+100+50):
360;
s_ss(1:
241)=0;
v_ss(1:
a_ss(1:
%绘图位移
t=[t_upt_st_down1t_down2t_down3t_ss];
phi=w.*t./180.*pi;
s=[s_up1s_ss_down11s_down22s_down33s_ss];
v=[v_up1v_sv_down11v_down22v_down33v_ss];
a=[a_up1a_sa_down11a_down22a_down33a_ss];
figure('
Name'
'
从动件位移-时间线图'
);
plot(t,s,'
k'
linewidth'
1.0);
gridon;
title('
xlabel('
转角\phi/度'
ylabel('
位移h/mm'
%绘图速度
从动件速度-时间线图'
plot(t,v,'
速度v/mm*s^{-1}'
%绘图加速度
从动件加速度-时间线图'
plot(t,a,'
加速度a/mm*s^{-2}'
3.绘制ds/dΦ线图并确定基圆半径和偏距
(1)绘制ds/dΦ线图及源程序
MATLAB源程序:
%%绘制ds/dphi-s线图,确定基圆半径和偏距
ds_dphi=v./w;
凸轮ds/dphi-s线图'
plot(ds_dphi,s,'
1.5);
holdon;
axis([-150150-7070]);
ds/dphi/(mm*s^{-2})'
s/mm'
%三条临界线
x=linspace(-150,150,301);
k_up=tan(pi/2-alpha_up_al);
y_up=k_up.*x-66;
plot(x,y_up,'
k_down=-tan(pi/2-alpha_down_al);
y_down=k_down.*x-24.7;
plot(x,y_down,'
x0=linspace(0,150,151);
k0=-tan(alpha_up_al);
y0=k0.*x0;
plot(x0,y0,'
--'
%由图像选取凸轮基圆半径为r0=sqrt(23^2+34^2)=41mm,偏距e=23mm
plot(23,-34,'
or'
r0=41;
e=23;
plot(linspace(0,23,10),linspace(0,-34,10),'
r'
linspace(0,23,10),linspace(-34,-34,10),'
linspace(23,23,10),linspace(0,-34,10),'
(2)确定基圆半径和偏距
在凸轮机构的ds/dφ-s线图里再作斜直线Dt-dt与升程的[ds/dφ-s]曲线相切并使与纵坐标夹角为升程许用压力角[α],则Dt-dt线的右下方为选择凸轮轴心的许用区。
作斜直线Dt'
-dt'
与回程的[ds/dφ-s]曲线相切,并使与纵坐标夹角为回程的许用压力角[α],则Dt'
线的左下方为选择凸轮轴心的许用区。
考虑到升程开始瞬时机构压力角也不超过许用值,自B0点作限制线B0-d0'
'
与纵坐标夹角为升程[α],则这三条直线的围成的下方区域为为选取凸轮中心的许用区。
由图可取基圆半径r0==41mm,偏距e=23mm,s0=34mm。
4.绘制凸轮理论轮廓压力角、曲率半径线图
(1)压力角、曲率半径数学模型
压力角计算公式:
曲率半径计算公式:
其中:
(2)MATLAB程序
%%凸轮理论轮廓压力角和曲率半径线图
s0=34;
%压力角
t=[t_upt_st_down1t_dow
 升级会员
升级会员 